mirror of
https://github.com/huggingface/diffusers.git
synced 2025-12-16 17:34:44 +08:00
Compare commits
1 Commits
| Author | SHA1 | Date | |
|---|---|---|---|
|
|
23a71cf184 |
17
.github/workflows/build_documentation.yml
vendored
17
.github/workflows/build_documentation.yml
vendored
@@ -1,17 +0,0 @@
|
||||
name: Build documentation
|
||||
|
||||
on:
|
||||
push:
|
||||
branches:
|
||||
- main
|
||||
- doc-builder*
|
||||
- v*-release
|
||||
|
||||
jobs:
|
||||
build:
|
||||
uses: huggingface/doc-builder/.github/workflows/build_main_documentation.yml@main
|
||||
with:
|
||||
commit_sha: ${{ github.sha }}
|
||||
package: diffusers
|
||||
secrets:
|
||||
token: ${{ secrets.HUGGINGFACE_PUSH }}
|
||||
16
.github/workflows/build_pr_documentation.yml
vendored
16
.github/workflows/build_pr_documentation.yml
vendored
@@ -1,16 +0,0 @@
|
||||
name: Build PR Documentation
|
||||
|
||||
on:
|
||||
pull_request:
|
||||
|
||||
concurrency:
|
||||
group: ${{ github.workflow }}-${{ github.head_ref || github.run_id }}
|
||||
cancel-in-progress: true
|
||||
|
||||
jobs:
|
||||
build:
|
||||
uses: huggingface/doc-builder/.github/workflows/build_pr_documentation.yml@main
|
||||
with:
|
||||
commit_sha: ${{ github.event.pull_request.head.sha }}
|
||||
pr_number: ${{ github.event.number }}
|
||||
package: diffusers
|
||||
13
.github/workflows/delete_doc_comment.yml
vendored
13
.github/workflows/delete_doc_comment.yml
vendored
@@ -1,13 +0,0 @@
|
||||
name: Delete dev documentation
|
||||
|
||||
on:
|
||||
pull_request:
|
||||
types: [ closed ]
|
||||
|
||||
|
||||
jobs:
|
||||
delete:
|
||||
uses: huggingface/doc-builder/.github/workflows/delete_doc_comment.yml@main
|
||||
with:
|
||||
pr_number: ${{ github.event.number }}
|
||||
package: diffusers
|
||||
@@ -1 +0,0 @@
|
||||
include diffusers/utils/model_card_template.md
|
||||
15
Makefile
15
Makefile
@@ -3,7 +3,7 @@
|
||||
# make sure to test the local checkout in scripts and not the pre-installed one (don't use quotes!)
|
||||
export PYTHONPATH = src
|
||||
|
||||
check_dirs := examples tests src utils
|
||||
check_dirs := models tests src utils
|
||||
|
||||
modified_only_fixup:
|
||||
$(eval modified_py_files := $(shell python utils/get_modified_files.py $(check_dirs)))
|
||||
@@ -34,23 +34,30 @@ autogenerate_code: deps_table_update
|
||||
# Check that the repo is in a good state
|
||||
|
||||
repo-consistency:
|
||||
python utils/check_copies.py
|
||||
python utils/check_table.py
|
||||
python utils/check_dummies.py
|
||||
python utils/check_repo.py
|
||||
python utils/check_inits.py
|
||||
python utils/check_config_docstrings.py
|
||||
python utils/tests_fetcher.py --sanity_check
|
||||
|
||||
# this target runs checks on all files
|
||||
|
||||
quality:
|
||||
black --check --preview $(check_dirs)
|
||||
isort --check-only $(check_dirs)
|
||||
python utils/custom_init_isort.py --check_only
|
||||
python utils/sort_auto_mappings.py --check_only
|
||||
flake8 $(check_dirs)
|
||||
doc-builder style src/diffusers docs/source --max_len 119 --check_only --path_to_docs docs/source
|
||||
doc-builder style src/transformers docs/source --max_len 119 --check_only --path_to_docs docs/source
|
||||
|
||||
# Format source code automatically and check is there are any problems left that need manual fixing
|
||||
|
||||
extra_style_checks:
|
||||
python utils/custom_init_isort.py
|
||||
doc-builder style src/diffusers docs/source --max_len 119 --path_to_docs docs/source
|
||||
python utils/sort_auto_mappings.py
|
||||
doc-builder style src/transformers docs/source --max_len 119 --path_to_docs docs/source
|
||||
|
||||
# this target runs checks on all files and potentially modifies some of them
|
||||
|
||||
@@ -67,6 +74,8 @@ fixup: modified_only_fixup extra_style_checks autogenerate_code repo-consistency
|
||||
# Make marked copies of snippets of codes conform to the original
|
||||
|
||||
fix-copies:
|
||||
python utils/check_copies.py --fix_and_overwrite
|
||||
python utils/check_table.py --fix_and_overwrite
|
||||
python utils/check_dummies.py --fix_and_overwrite
|
||||
|
||||
# Run tests for the library
|
||||
|
||||
219
README.md
219
README.md
@@ -1,135 +1,160 @@
|
||||
<p align="center">
|
||||
<br>
|
||||
<img src="docs/source/imgs/diffusers_library.jpg" width="400"/>
|
||||
<br>
|
||||
<p>
|
||||
<p align="center">
|
||||
<a href="https://github.com/huggingface/diffusers/blob/main/LICENSE">
|
||||
<img alt="GitHub" src="https://img.shields.io/github/license/huggingface/datasets.svg?color=blue">
|
||||
</a>
|
||||
<a href="https://github.com/huggingface/diffusers/releases">
|
||||
<img alt="GitHub release" src="https://img.shields.io/github/release/huggingface/diffusers.svg">
|
||||
</a>
|
||||
<a href="CODE_OF_CONDUCT.md">
|
||||
<img alt="Contributor Covenant" src="https://img.shields.io/badge/Contributor%20Covenant-2.0-4baaaa.svg">
|
||||
</a>
|
||||
</p>
|
||||
|
||||
🤗 Diffusers provides pretrained diffusion models across multiple modalities, such as vision and audio, and serves
|
||||
as a modular toolbox for inference and training of diffusion models.
|
||||
|
||||
More precisely, 🤗 Diffusers offers:
|
||||
|
||||
- State-of-the-art diffusion pipelines that can be run in inference with just a couple of lines of code (see [src/diffusers/pipelines](https://github.com/huggingface/diffusers/tree/main/src/diffusers/pipelines)).
|
||||
- Various noise schedulers that can be used interchangeably for the prefered speed vs. quality trade-off in inference (see [src/diffusers/schedulers](https://github.com/huggingface/diffusers/tree/main/src/diffusers/schedulers)).
|
||||
- Multiple types of models, such as UNet, that can be used as building blocks in an end-to-end diffusion system (see [src/diffusers/models](https://github.com/huggingface/diffusers/tree/main/src/diffusers/models)).
|
||||
- Training examples to show how to train the most popular diffusion models (see [examples](https://github.com/huggingface/diffusers/tree/main/examples)).
|
||||
# Diffusers
|
||||
|
||||
## Definitions
|
||||
|
||||
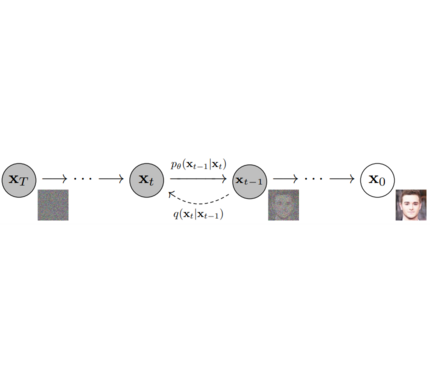
**Models**: Neural network that models $p_\theta(\mathbf{x}_{t-1}|\mathbf{x}_t)$ (see image below) and is trained end-to-end to *denoise* a noisy input to an image.
|
||||
*Examples*: UNet, Conditioned UNet, 3D UNet, Transformer UNet
|
||||
**Models**: Single neural network that models p_θ(x_t-1|x_t) and is trained to “denoise” to image
|
||||
*Examples: UNet, Conditioned UNet, 3D UNet, Transformer UNet*
|
||||
|
||||
<p align="center">
|
||||
<img src="https://user-images.githubusercontent.com/10695622/174349667-04e9e485-793b-429a-affe-096e8199ad5b.png" width="800"/>
|
||||
<br>
|
||||
<em> Figure from DDPM paper (https://arxiv.org/abs/2006.11239). </em>
|
||||
<p>
|
||||
|
||||
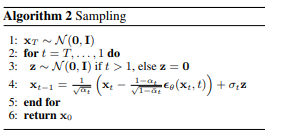
**Schedulers**: Algorithm class for both **inference** and **training**.
|
||||
The class provides functionality to compute previous image according to alpha, beta schedule as well as predict noise for training.
|
||||
*Examples*: [DDPM](https://arxiv.org/abs/2006.11239), [DDIM](https://arxiv.org/abs/2010.02502), [PNDM](https://arxiv.org/abs/2202.09778), [DEIS](https://arxiv.org/abs/2204.13902)
|
||||
|
||||
|
||||
<p align="center">
|
||||
<img src="https://user-images.githubusercontent.com/10695622/174349706-53d58acc-a4d1-4cda-b3e8-432d9dc7ad38.png" width="800"/>
|
||||
<br>
|
||||
<em> Sampling and training algorithms. Figure from DDPM paper (https://arxiv.org/abs/2006.11239). </em>
|
||||
<p>
|
||||
|
||||
**Schedulers**: Algorithm to sample noise schedule for both *training* and *inference*. Defines alpha and beta schedule, timesteps, etc..
|
||||
*Example: Gaussian DDPM, DDIM, PMLS, DEIN*
|
||||
|
||||
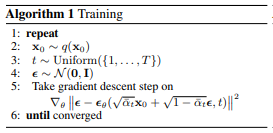
**Diffusion Pipeline**: End-to-end pipeline that includes multiple diffusion models, possible text encoders, ...
|
||||
*Examples*: Glide, Latent-Diffusion, Imagen, DALL-E 2
|
||||
|
||||
|
||||
|
||||
<p align="center">
|
||||
<img src="https://user-images.githubusercontent.com/10695622/174348898-481bd7c2-5457-4830-89bc-f0907756f64c.jpeg" width="550"/>
|
||||
<br>
|
||||
<em> Figure from ImageGen (https://imagen.research.google/). </em>
|
||||
<p>
|
||||
|
||||
## Philosophy
|
||||
**Diffusion Pipeline**: End-to-end pipeline that includes multiple diffusion models, possible text encoders, CLIP
|
||||
*Example: GLIDE,CompVis/Latent-Diffusion, Imagen, DALL-E*
|
||||
|
||||
- Readability and clarity is prefered over highly optimized code. A strong importance is put on providing readable, intuitive and elementary code design. *E.g.*, the provided [schedulers](https://github.com/huggingface/diffusers/tree/main/src/diffusers/schedulers) are separated from the provided [models](https://github.com/huggingface/diffusers/tree/main/src/diffusers/models) and provide well-commented code that can be read alongside the original paper.
|
||||
- Diffusers is **modality independent** and focusses on providing pretrained models and tools to build systems that generate **continous outputs**, *e.g.* vision and audio.
|
||||
- Diffusion models and schedulers are provided as consise, elementary building blocks whereas diffusion pipelines are a collection of end-to-end diffusion systems that can be used out-of-the-box, should stay as close as possible to their original implementation and can include components of other library, such as text-encoders. Examples for diffusion pipelines are [Glide](https://github.com/openai/glide-text2im) and [Latent Diffusion](https://github.com/CompVis/latent-diffusion).
|
||||
|
||||
|
||||
## Quickstart
|
||||
|
||||
**Check out this notebook: https://colab.research.google.com/drive/1nMfF04cIxg6FujxsNYi9kiTRrzj4_eZU?usp=sharing**
|
||||
|
||||
### Installation
|
||||
|
||||
```
|
||||
pip install diffusers # should install diffusers 0.0.4
|
||||
```
|
||||
|
||||
### 1. `diffusers` as a toolbox for schedulers and models
|
||||
## 1. `diffusers` as a central modular diffusion and sampler library
|
||||
|
||||
`diffusers` is more modularized than `transformers`. The idea is that researchers and engineers can use only parts of the library easily for the own use cases.
|
||||
It could become a central place for all kinds of models, schedulers, training utils and processors that one can mix and match for one's own use case.
|
||||
Both models and schedulers should be load- and saveable from the Hub.
|
||||
Both models and scredulers should be load- and saveable from the Hub.
|
||||
|
||||
For more examples see [schedulers](https://github.com/huggingface/diffusers/tree/main/src/diffusers/schedulers) and [models](https://github.com/huggingface/diffusers/tree/main/src/diffusers/models)
|
||||
|
||||
#### **Example for Unconditonal Image generation [DDPM](https://arxiv.org/abs/2006.11239):**
|
||||
Example:
|
||||
|
||||
```python
|
||||
import torch
|
||||
from diffusers import UNet2DModel, DDIMScheduler
|
||||
import PIL.Image
|
||||
from diffusers import UNetModel, GaussianDDPMScheduler
|
||||
import PIL
|
||||
import numpy as np
|
||||
import tqdm
|
||||
|
||||
generator = torch.Generator()
|
||||
generator = generator.manual_seed(6694729458485568)
|
||||
torch_device = "cuda" if torch.cuda.is_available() else "cpu"
|
||||
|
||||
# 1. Load models
|
||||
scheduler = DDIMScheduler.from_config("fusing/ddpm-celeba-hq", tensor_format="pt")
|
||||
unet = UNet2DModel.from_pretrained("fusing/ddpm-celeba-hq", ddpm=True).to(torch_device)
|
||||
scheduler = GaussianDDPMScheduler.from_config("fusing/ddpm-lsun-church")
|
||||
model = UNetModel.from_pretrained("fusing/ddpm-lsun-church").to(torch_device)
|
||||
|
||||
# 2. Sample gaussian noise
|
||||
generator = torch.manual_seed(23)
|
||||
unet.image_size = unet.resolution
|
||||
image = torch.randn(
|
||||
(1, unet.in_channels, unet.image_size, unet.image_size),
|
||||
generator=generator,
|
||||
)
|
||||
image = image.to(torch_device)
|
||||
image = scheduler.sample_noise((1, model.in_channels, model.resolution, model.resolution), device=torch_device, generator=generator)
|
||||
|
||||
# 3. Denoise
|
||||
num_inference_steps = 50
|
||||
eta = 0.0 # <- deterministic sampling
|
||||
scheduler.set_timesteps(num_inference_steps)
|
||||
# 3. Denoise
|
||||
for t in reversed(range(len(scheduler))):
|
||||
# i) define coefficients for time step t
|
||||
clipped_image_coeff = 1 / torch.sqrt(scheduler.get_alpha_prod(t))
|
||||
clipped_noise_coeff = torch.sqrt(1 / scheduler.get_alpha_prod(t) - 1)
|
||||
image_coeff = (1 - scheduler.get_alpha_prod(t - 1)) * torch.sqrt(scheduler.get_alpha(t)) / (1 - scheduler.get_alpha_prod(t))
|
||||
clipped_coeff = torch.sqrt(scheduler.get_alpha_prod(t - 1)) * scheduler.get_beta(t) / (1 - scheduler.get_alpha_prod(t))
|
||||
|
||||
for t in tqdm.tqdm(scheduler.timesteps):
|
||||
# 1. predict noise residual
|
||||
# ii) predict noise residual
|
||||
with torch.no_grad():
|
||||
residual = unet(image, t)["sample"]
|
||||
noise_residual = model(image, t)
|
||||
|
||||
prev_image = scheduler.step(residual, t, image, eta)["prev_sample"]
|
||||
# iii) compute predicted image from residual
|
||||
# See 2nd formula at https://github.com/hojonathanho/diffusion/issues/5#issue-896554416 for comparison
|
||||
pred_mean = clipped_image_coeff * image - clipped_noise_coeff * noise_residual
|
||||
pred_mean = torch.clamp(pred_mean, -1, 1)
|
||||
prev_image = clipped_coeff * pred_mean + image_coeff * image
|
||||
|
||||
# 3. set current image to prev_image: x_t -> x_t-1
|
||||
image = prev_image
|
||||
# iv) sample variance
|
||||
prev_variance = scheduler.sample_variance(t, prev_image.shape, device=torch_device, generator=generator)
|
||||
|
||||
# 4. process image to PIL
|
||||
# v) sample x_{t-1} ~ N(prev_image, prev_variance)
|
||||
sampled_prev_image = prev_image + prev_variance
|
||||
image = sampled_prev_image
|
||||
|
||||
# process image to PIL
|
||||
image_processed = image.cpu().permute(0, 2, 3, 1)
|
||||
image_processed = (image_processed + 1.0) * 127.5
|
||||
image_processed = image_processed.numpy().astype(np.uint8)
|
||||
image_pil = PIL.Image.fromarray(image_processed[0])
|
||||
|
||||
# 5. save image
|
||||
image_pil.save("generated_image.png")
|
||||
```
|
||||
# save image
|
||||
image_pil.save("test.png")
|
||||
```
|
||||
|
||||
#### **Example for Unconditonal Image generation [LDM](https://github.com/CompVis/latent-diffusion):**
|
||||
## 2. `diffusers` as a collection of most important Diffusion systems (GLIDE, Dalle, ...)
|
||||
`models` directory in repository hosts the complete code necessary for running a diffusion system as well as to train it. A `DiffusionPipeline` class allows to easily run the diffusion model in inference:
|
||||
|
||||
Example:
|
||||
|
||||
```python
|
||||
from diffusers import DiffusionPipeline
|
||||
import PIL.Image
|
||||
import numpy as np
|
||||
|
||||
# load model and scheduler
|
||||
ddpm = DiffusionPipeline.from_pretrained("fusing/ddpm-lsun-bedroom")
|
||||
|
||||
# run pipeline in inference (sample random noise and denoise)
|
||||
image = ddpm()
|
||||
|
||||
# process image to PIL
|
||||
image_processed = image.cpu().permute(0, 2, 3, 1)
|
||||
image_processed = (image_processed + 1.0) * 127.5
|
||||
image_processed = image_processed.numpy().astype(np.uint8)
|
||||
image_pil = PIL.Image.fromarray(image_processed[0])
|
||||
|
||||
# save image
|
||||
image_pil.save("test.png")
|
||||
```
|
||||
|
||||
## Library structure:
|
||||
|
||||
```
|
||||
├── models
|
||||
│ ├── audio
|
||||
│ │ └── fastdiff
|
||||
│ │ ├── modeling_fastdiff.py
|
||||
│ │ ├── README.md
|
||||
│ │ └── run_fastdiff.py
|
||||
│ ├── __init__.py
|
||||
│ └── vision
|
||||
│ ├── dalle2
|
||||
│ │ ├── modeling_dalle2.py
|
||||
│ │ ├── README.md
|
||||
│ │ └── run_dalle2.py
|
||||
│ ├── ddpm
|
||||
│ │ ├── example.py
|
||||
│ │ ├── modeling_ddpm.py
|
||||
│ │ ├── README.md
|
||||
│ │ └── run_ddpm.py
|
||||
│ ├── glide
|
||||
│ │ ├── modeling_glide.py
|
||||
│ │ ├── modeling_vqvae.py.py
|
||||
│ │ ├── README.md
|
||||
│ │ └── run_glide.py
|
||||
│ ├── imagen
|
||||
│ │ ├── modeling_dalle2.py
|
||||
│ │ ├── README.md
|
||||
│ │ └── run_dalle2.py
|
||||
│ ├── __init__.py
|
||||
│ └── latent_diffusion
|
||||
│ ├── modeling_latent_diffusion.py
|
||||
│ ├── README.md
|
||||
│ └── run_latent_diffusion.py
|
||||
├── pyproject.toml
|
||||
├── README.md
|
||||
├── setup.cfg
|
||||
├── setup.py
|
||||
├── src
|
||||
│ └── diffusers
|
||||
│ ├── configuration_utils.py
|
||||
│ ├── __init__.py
|
||||
│ ├── modeling_utils.py
|
||||
│ ├── models
|
||||
│ │ ├── __init__.py
|
||||
│ │ ├── unet_glide.py
|
||||
│ │ └── unet.py
|
||||
│ ├── pipeline_utils.py
|
||||
│ └── schedulers
|
||||
│ ├── gaussian_ddpm.py
|
||||
│ ├── __init__.py
|
||||
├── tests
|
||||
│ └── test_modeling_utils.py
|
||||
```
|
||||
|
||||
@@ -1,40 +0,0 @@
|
||||
- sections:
|
||||
- local: index
|
||||
title: 🧨 Diffusers
|
||||
- local: quicktour
|
||||
title: Quicktour
|
||||
- local: philosophy
|
||||
title: Philosophy
|
||||
title: Get started
|
||||
- sections:
|
||||
- sections:
|
||||
- local: examples/diffusers_for_vision
|
||||
title: Diffusers for Vision
|
||||
- local: examples/diffusers_for_audio
|
||||
title: Diffusers for Audio
|
||||
- local: examples/diffusers_for_other
|
||||
title: Diffusers for Other Modalities
|
||||
title: Examples
|
||||
title: Using Diffusers
|
||||
- sections:
|
||||
- sections:
|
||||
- local: pipelines
|
||||
title: Pipelines
|
||||
- local: schedulers
|
||||
title: Schedulers
|
||||
- local: models
|
||||
title: Models
|
||||
title: Main Classes
|
||||
- sections:
|
||||
- local: pipelines/glide
|
||||
title: "Glide"
|
||||
title: Pipelines
|
||||
- sections:
|
||||
- local: schedulers/ddpm
|
||||
title: "DDPM"
|
||||
title: Schedulers
|
||||
- sections:
|
||||
- local: models/unet
|
||||
title: "Unet"
|
||||
title: Models
|
||||
title: API
|
||||
@@ -1,13 +0,0 @@
|
||||
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
|
||||
|
||||
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
|
||||
the License. You may obtain a copy of the License at
|
||||
|
||||
http://www.apache.org/licenses/LICENSE-2.0
|
||||
|
||||
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
|
||||
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
|
||||
specific language governing permissions and limitations under the License.
|
||||
-->
|
||||
|
||||
# Diffusers for audio
|
||||
@@ -1,20 +0,0 @@
|
||||
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
|
||||
|
||||
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
|
||||
the License. You may obtain a copy of the License at
|
||||
|
||||
http://www.apache.org/licenses/LICENSE-2.0
|
||||
|
||||
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
|
||||
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
|
||||
specific language governing permissions and limitations under the License.
|
||||
-->
|
||||
|
||||
# Diffusers for other modalities
|
||||
|
||||
Diffusers offers support to other modalities than vision and audio.
|
||||
Currently, some examples include:
|
||||
- [Diffuser](https://diffusion-planning.github.io/) for planning in reinforcement learning (currenlty only inference): [](https://colab.research.google.com/drive/1TmBmlYeKUZSkUZoJqfBmaicVTKx6nN1R?usp=sharing)
|
||||
|
||||
If you are interested in contributing to under-construction examples, you can explore:
|
||||
- [GeoDiff](https://github.com/MinkaiXu/GeoDiff) for generating 3D configurations of molecule diagrams [](https://colab.research.google.com/drive/1pLYYWQhdLuv1q-JtEHGZybxp2RBF8gPs?usp=sharing).
|
||||
@@ -1,150 +0,0 @@
|
||||
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
|
||||
|
||||
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
|
||||
the License. You may obtain a copy of the License at
|
||||
|
||||
http://www.apache.org/licenses/LICENSE-2.0
|
||||
|
||||
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
|
||||
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
|
||||
specific language governing permissions and limitations under the License.
|
||||
-->
|
||||
|
||||
# Diffusers for vision
|
||||
|
||||
## Direct image generation
|
||||
|
||||
#### **Example image generation with PNDM**
|
||||
|
||||
```python
|
||||
from diffusers import PNDM, UNetModel, PNDMScheduler
|
||||
import PIL.Image
|
||||
import numpy as np
|
||||
import torch
|
||||
|
||||
model_id = "fusing/ddim-celeba-hq"
|
||||
|
||||
model = UNetModel.from_pretrained(model_id)
|
||||
scheduler = PNDMScheduler()
|
||||
|
||||
# load model and scheduler
|
||||
pndm = PNDM(unet=model, noise_scheduler=scheduler)
|
||||
|
||||
# run pipeline in inference (sample random noise and denoise)
|
||||
with torch.no_grad():
|
||||
image = pndm()
|
||||
|
||||
# process image to PIL
|
||||
image_processed = image.cpu().permute(0, 2, 3, 1)
|
||||
image_processed = (image_processed + 1.0) / 2
|
||||
image_processed = torch.clamp(image_processed, 0.0, 1.0)
|
||||
image_processed = image_processed * 255
|
||||
image_processed = image_processed.numpy().astype(np.uint8)
|
||||
image_pil = PIL.Image.fromarray(image_processed[0])
|
||||
|
||||
# save image
|
||||
image_pil.save("test.png")
|
||||
```
|
||||
|
||||
#### **Example 1024x1024 image generation with SDE VE**
|
||||
|
||||
See [paper](https://arxiv.org/abs/2011.13456) for more information on SDE VE.
|
||||
|
||||
```python
|
||||
from diffusers import DiffusionPipeline
|
||||
import torch
|
||||
import PIL.Image
|
||||
import numpy as np
|
||||
|
||||
torch.manual_seed(32)
|
||||
|
||||
score_sde_sv = DiffusionPipeline.from_pretrained("fusing/ffhq_ncsnpp")
|
||||
|
||||
# Note this might take up to 3 minutes on a GPU
|
||||
image = score_sde_sv(num_inference_steps=2000)
|
||||
|
||||
image = image.permute(0, 2, 3, 1).cpu().numpy()
|
||||
image = np.clip(image * 255, 0, 255).astype(np.uint8)
|
||||
image_pil = PIL.Image.fromarray(image[0])
|
||||
|
||||
# save image
|
||||
image_pil.save("test.png")
|
||||
```
|
||||
#### **Example 32x32 image generation with SDE VP**
|
||||
|
||||
See [paper](https://arxiv.org/abs/2011.13456) for more information on SDE VE.
|
||||
|
||||
```python
|
||||
from diffusers import DiffusionPipeline
|
||||
import torch
|
||||
import PIL.Image
|
||||
import numpy as np
|
||||
|
||||
torch.manual_seed(32)
|
||||
|
||||
score_sde_sv = DiffusionPipeline.from_pretrained("fusing/cifar10-ddpmpp-deep-vp")
|
||||
|
||||
# Note this might take up to 3 minutes on a GPU
|
||||
image = score_sde_sv(num_inference_steps=1000)
|
||||
|
||||
image = image.permute(0, 2, 3, 1).cpu().numpy()
|
||||
image = np.clip(image * 255, 0, 255).astype(np.uint8)
|
||||
image_pil = PIL.Image.fromarray(image[0])
|
||||
|
||||
# save image
|
||||
image_pil.save("test.png")
|
||||
```
|
||||
|
||||
|
||||
#### **Text to Image generation with Latent Diffusion**
|
||||
|
||||
_Note: To use latent diffusion install transformers from [this branch](https://github.com/patil-suraj/transformers/tree/ldm-bert)._
|
||||
|
||||
```python
|
||||
from diffusers import DiffusionPipeline
|
||||
|
||||
ldm = DiffusionPipeline.from_pretrained("fusing/latent-diffusion-text2im-large")
|
||||
|
||||
generator = torch.manual_seed(42)
|
||||
|
||||
prompt = "A painting of a squirrel eating a burger"
|
||||
image = ldm([prompt], generator=generator, eta=0.3, guidance_scale=6.0, num_inference_steps=50)
|
||||
|
||||
image_processed = image.cpu().permute(0, 2, 3, 1)
|
||||
image_processed = image_processed * 255.0
|
||||
image_processed = image_processed.numpy().astype(np.uint8)
|
||||
image_pil = PIL.Image.fromarray(image_processed[0])
|
||||
|
||||
# save image
|
||||
image_pil.save("test.png")
|
||||
```
|
||||
|
||||
|
||||
## Text to image generation
|
||||
|
||||
```python
|
||||
import torch
|
||||
from diffusers import BDDMPipeline, GradTTSPipeline
|
||||
|
||||
torch_device = "cuda"
|
||||
|
||||
# load grad tts and bddm pipelines
|
||||
grad_tts = GradTTSPipeline.from_pretrained("fusing/grad-tts-libri-tts")
|
||||
bddm = BDDMPipeline.from_pretrained("fusing/diffwave-vocoder-ljspeech")
|
||||
|
||||
text = "Hello world, I missed you so much."
|
||||
|
||||
# generate mel spectograms using text
|
||||
mel_spec = grad_tts(text, torch_device=torch_device)
|
||||
|
||||
# generate the speech by passing mel spectograms to BDDMPipeline pipeline
|
||||
generator = torch.manual_seed(42)
|
||||
audio = bddm(mel_spec, generator, torch_device=torch_device)
|
||||
|
||||
# save generated audio
|
||||
from scipy.io.wavfile import write as wavwrite
|
||||
|
||||
sampling_rate = 22050
|
||||
wavwrite("generated_audio.wav", sampling_rate, audio.squeeze().cpu().numpy())
|
||||
```
|
||||
|
||||
{kind=link}
Binary file not shown.
|
Before Width: | Height: | Size: 14 KiB |
@@ -1,110 +0,0 @@
|
||||
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
|
||||
|
||||
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
|
||||
the License. You may obtain a copy of the License at
|
||||
|
||||
http://www.apache.org/licenses/LICENSE-2.0
|
||||
|
||||
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
|
||||
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
|
||||
specific language governing permissions and limitations under the License.
|
||||
-->
|
||||
|
||||
<p align="center">
|
||||
<br>
|
||||
<img src="https://raw.githubusercontent.com/huggingface/diffusers/77aadfee6a891ab9fcfb780f87c693f7a5beeb8e/docs/source/imgs/diffusers_library.jpg" width="400"/>
|
||||
<br>
|
||||
</p>
|
||||
|
||||
# 🧨 Diffusers
|
||||
|
||||
|
||||
🤗 Diffusers provides pretrained diffusion models across multiple modalities, such as vision and audio, and serves
|
||||
as a modular toolbox for inference and training of diffusion models.
|
||||
|
||||
More precisely, 🤗 Diffusers offers:
|
||||
|
||||
- State-of-the-art diffusion pipelines that can be run in inference with just a couple of lines of code (see [src/diffusers/pipelines](https://github.com/huggingface/diffusers/tree/main/src/diffusers/pipelines)).
|
||||
- Various noise schedulers that can be used interchangeably for the prefered speed vs. quality trade-off in inference (see [src/diffusers/schedulers](https://github.com/huggingface/diffusers/tree/main/src/diffusers/schedulers)).
|
||||
- Multiple types of models, such as UNet, that can be used as building blocks in an end-to-end diffusion system (see [src/diffusers/models](https://github.com/huggingface/diffusers/tree/main/src/diffusers/models)).
|
||||
- Training examples to show how to train the most popular diffusion models (see [examples](https://github.com/huggingface/diffusers/tree/main/examples)).
|
||||
|
||||
# Installation
|
||||
|
||||
Install Diffusers for with PyTorch. Support for other libraries will come in the future
|
||||
|
||||
🤗 Diffusers is tested on Python 3.6+, and PyTorch 1.4.0+.
|
||||
|
||||
## Install with pip
|
||||
|
||||
You should install 🤗 Diffusers in a [virtual environment](https://docs.python.org/3/library/venv.html).
|
||||
If you're unfamiliar with Python virtual environments, take a look at this [guide](https://packaging.python.org/guides/installing-using-pip-and-virtual-environments/).
|
||||
A virtual environment makes it easier to manage different projects, and avoid compatibility issues between dependencies.
|
||||
|
||||
Start by creating a virtual environment in your project directory:
|
||||
|
||||
```bash
|
||||
python -m venv .env
|
||||
```
|
||||
|
||||
Activate the virtual environment:
|
||||
|
||||
```bash
|
||||
source .env/bin/activate
|
||||
```
|
||||
|
||||
Now you're ready to install 🤗 Diffusers with the following command:
|
||||
|
||||
```bash
|
||||
pip install diffusers
|
||||
```
|
||||
|
||||
## Install from source
|
||||
|
||||
Install 🤗 Diffusers from source with the following command:
|
||||
|
||||
```bash
|
||||
pip install git+https://github.com/huggingface/diffusers
|
||||
```
|
||||
|
||||
This command installs the bleeding edge `main` version rather than the latest `stable` version.
|
||||
The `main` version is useful for staying up-to-date with the latest developments.
|
||||
For instance, if a bug has been fixed since the last official release but a new release hasn't been rolled out yet.
|
||||
However, this means the `main` version may not always be stable.
|
||||
We strive to keep the `main` version operational, and most issues are usually resolved within a few hours or a day.
|
||||
If you run into a problem, please open an [Issue](https://github.com/huggingface/transformers/issues) so we can fix it even sooner!
|
||||
|
||||
## Editable install
|
||||
|
||||
You will need an editable install if you'd like to:
|
||||
|
||||
* Use the `main` version of the source code.
|
||||
* Contribute to 🤗 Diffusers and need to test changes in the code.
|
||||
|
||||
Clone the repository and install 🤗 Diffusers with the following commands:
|
||||
|
||||
```bash
|
||||
git clone https://github.com/huggingface/diffusers.git
|
||||
cd transformers
|
||||
pip install -e .
|
||||
```
|
||||
|
||||
These commands will link the folder you cloned the repository to and your Python library paths.
|
||||
Python will now look inside the folder you cloned to in addition to the normal library paths.
|
||||
For example, if your Python packages are typically installed in `~/anaconda3/envs/main/lib/python3.7/site-packages/`, Python will also search the folder you cloned to: `~/diffusers/`.
|
||||
|
||||
<Tip warning={true}>
|
||||
|
||||
You must keep the `diffusers` folder if you want to keep using the library.
|
||||
|
||||
</Tip>
|
||||
|
||||
Now you can easily update your clone to the latest version of 🤗 Diffusers with the following command:
|
||||
|
||||
```bash
|
||||
cd ~/diffusers/
|
||||
git pull
|
||||
```
|
||||
|
||||
Your Python environment will find the `main` version of 🤗 Diffuers on the next run.
|
||||
|
||||
@@ -1,28 +0,0 @@
|
||||
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
|
||||
|
||||
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
|
||||
the License. You may obtain a copy of the License at
|
||||
|
||||
http://www.apache.org/licenses/LICENSE-2.0
|
||||
|
||||
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
|
||||
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
|
||||
specific language governing permissions and limitations under the License.
|
||||
-->
|
||||
|
||||
# Models
|
||||
|
||||
Diffusers contains pretrained models for popular algorithms and modules for creating the next set of diffusion models.
|
||||
The primary function of these models is to denoise an input sample, by modeling the distribution $p_\theta(\mathbf{x}_{t-1}|\mathbf{x}_t)$.
|
||||
The models are built on the base class ['ModelMixin'] that is a `torch.nn.module` with basic functionality for saving and loading models both locally and from the HuggingFace hub.
|
||||
|
||||
## API
|
||||
|
||||
Models should provide the `def forward` function and initialization of the model.
|
||||
All saving, loading, and utilities should be in the base ['ModelMixin'] class.
|
||||
|
||||
## Examples
|
||||
|
||||
- The ['UNetModel'] was proposed in [TODO](https://arxiv.org/) and has been used in paper1, paper2, paper3.
|
||||
- Extensions of the ['UNetModel'] include the ['UNetGlideModel'] that uses attention and timestep embeddings for the [GLIDE](https://arxiv.org/abs/2112.10741) paper, the ['UNetGradTTS'] model from this [paper](https://arxiv.org/abs/2105.06337) for text-to-speech, ['UNetLDMModel'] for latent-diffusion models in this [paper](https://arxiv.org/abs/2112.10752), and the ['TemporalUNet'] used for time-series prediciton in this reinforcement learning [paper](https://arxiv.org/abs/2205.09991).
|
||||
- TODO: mention VAE / SDE score estimation
|
||||
@@ -1,4 +0,0 @@
|
||||
# UNet
|
||||
|
||||
The UNet is an example often used in diffusion models.
|
||||
It was originally published [here](https://www.google.com).
|
||||
@@ -1,17 +0,0 @@
|
||||
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
|
||||
|
||||
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
|
||||
the License. You may obtain a copy of the License at
|
||||
|
||||
http://www.apache.org/licenses/LICENSE-2.0
|
||||
|
||||
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
|
||||
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
|
||||
specific language governing permissions and limitations under the License.
|
||||
-->
|
||||
|
||||
# Philosophy
|
||||
|
||||
- Readability and clarity is prefered over highly optimized code. A strong importance is put on providing readable, intuitive and elementary code design. *E.g.*, the provided [schedulers](https://github.com/huggingface/diffusers/tree/main/src/diffusers/schedulers) are separated from the provided [models](https://github.com/huggingface/diffusers/tree/main/src/diffusers/models) and provide well-commented code that can be read alongside the original paper.
|
||||
- Diffusers is **modality independent** and focusses on providing pretrained models and tools to build systems that generate **continous outputs**, *e.g.* vision and audio.
|
||||
- Diffusion models and schedulers are provided as consise, elementary building blocks whereas diffusion pipelines are a collection of end-to-end diffusion systems that can be used out-of-the-box, should stay as close as possible to their original implementation and can include components of other library, such as text-encoders. Examples for diffusion pipelines are [Glide](https://github.com/openai/glide-text2im) and [Latent Diffusion](https://github.com/CompVis/latent-diffusion).
|
||||
@@ -1,31 +0,0 @@
|
||||
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
|
||||
|
||||
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
|
||||
the License. You may obtain a copy of the License at
|
||||
|
||||
http://www.apache.org/licenses/LICENSE-2.0
|
||||
|
||||
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
|
||||
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
|
||||
specific language governing permissions and limitations under the License.
|
||||
-->
|
||||
|
||||
# Pipelines
|
||||
|
||||
- Pipelines are a collection of end-to-end diffusion systems that can be used out-of-the-box
|
||||
- Pipelines should stay as close as possible to their original implementation
|
||||
- Pipelines can include components of other library, such as text-encoders.
|
||||
|
||||
## API
|
||||
|
||||
TODO(Patrick, Anton, Suraj)
|
||||
|
||||
## Examples
|
||||
|
||||
- DDPM for unconditional image generation in [pipeline_ddpm](https://github.com/huggingface/diffusers/blob/main/src/diffusers/pipelines/pipeline_ddpm.py).
|
||||
- DDIM for unconditional image generation in [pipeline_ddim](https://github.com/huggingface/diffusers/blob/main/src/diffusers/pipelines/pipeline_ddim.py).
|
||||
- PNDM for unconditional image generation in [pipeline_pndm](https://github.com/huggingface/diffusers/blob/main/src/diffusers/pipelines/pipeline_pndm.py).
|
||||
- Latent diffusion for text to image generation / conditional image generation in [pipeline_latent_diffusion](https://github.com/huggingface/diffusers/blob/main/src/diffusers/pipelines/pipeline_latent_diffusion.py).
|
||||
- Glide for text to image generation / conditional image generation in [pipeline_glide](https://github.com/huggingface/diffusers/blob/main/src/diffusers/pipelines/pipeline_glide.py).
|
||||
- BDDMPipeline for spectrogram-to-sound vocoding in [pipeline_bddm](https://github.com/huggingface/diffusers/blob/main/src/diffusers/pipelines/pipeline_bddm.py).
|
||||
- Grad-TTS for text to audio generation / conditional audio generation in [pipeline_grad_tts](https://github.com/huggingface/diffusers/blob/main/src/diffusers/pipelines/pipeline_grad_tts.py).
|
||||
@@ -1 +0,0 @@
|
||||
# GLIDE MODEL
|
||||
@@ -1,32 +0,0 @@
|
||||
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
|
||||
|
||||
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
|
||||
the License. You may obtain a copy of the License at
|
||||
|
||||
http://www.apache.org/licenses/LICENSE-2.0
|
||||
|
||||
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
|
||||
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
|
||||
specific language governing permissions and limitations under the License.
|
||||
-->
|
||||
|
||||
|
||||
|
||||
# Quicktour
|
||||
|
||||
Start using Diffusers🧨 quickly!
|
||||
To start, use the [`DiffusionPipeline`] for quick inference and sample generations!
|
||||
|
||||
```
|
||||
pip install diffusers
|
||||
```
|
||||
|
||||
## Main classes
|
||||
|
||||
### Models
|
||||
|
||||
### Schedulers
|
||||
|
||||
### Pipeliens
|
||||
|
||||
|
||||
@@ -1,33 +0,0 @@
|
||||
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
|
||||
|
||||
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
|
||||
the License. You may obtain a copy of the License at
|
||||
|
||||
http://www.apache.org/licenses/LICENSE-2.0
|
||||
|
||||
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
|
||||
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
|
||||
specific language governing permissions and limitations under the License.
|
||||
-->
|
||||
|
||||
# Schedulers
|
||||
|
||||
The base class ['SchedulerMixin'] implements low level utilities used by multiple schedulers.
|
||||
At a high level:
|
||||
- Schedulers are the algorithms to use diffusion models in inference as well as for training. They include the noise schedules and define algorithm-specific diffusion steps.
|
||||
- Schedulers can be used interchangable between diffusion models in inference to find the preferred tradef-off between speed and generation quality.
|
||||
- Schedulers are available in numpy, but can easily be transformed into PyTorch.
|
||||
|
||||
## API
|
||||
|
||||
- Schedulers should provide one or more `def step(...)` functions that should be called iteratively to unroll the diffusion loop during
|
||||
the forward pass.
|
||||
- Schedulers should be framework-agonstic, but provide a simple functionality to convert the scheduler into a specific framework, such as PyTorch
|
||||
with a `set_format(...)` method.
|
||||
|
||||
## Examples
|
||||
|
||||
- The ['DDPMScheduler'] was proposed in [Denoising Diffusion Probabilistic Models](https://arxiv.org/abs/2006.11239) and can be found in [scheduling_ddpm.py](https://github.com/huggingface/diffusers/blob/main/src/diffusers/schedulers/scheduling_ddpm.py).
|
||||
An example of how to use this scheduler can be found in [pipeline_ddpm.py](https://github.com/huggingface/diffusers/blob/main/src/diffusers/pipelines/pipeline_ddpm.py).
|
||||
- The ['DDIMScheduler'] was proposed in [Denoising Diffusion Implicit Models](https://arxiv.org/abs/2010.02502) and can be found in [scheduling_ddim.py](https://github.com/huggingface/diffusers/blob/main/src/diffusers/schedulers/scheduling_ddim.py). An example of how to use this scheduler can be found in [pipeline_ddim.py](https://github.com/huggingface/diffusers/blob/main/src/diffusers/pipelines/pipeline_ddim.py).
|
||||
- The ['PNMDScheduler'] was proposed in [Pseudo Numerical Methods for Diffusion Models on Manifolds](https://arxiv.org/abs/2202.09778) and can be found in [scheduling_pndm.py](https://github.com/huggingface/diffusers/blob/main/src/diffusers/schedulers/scheduling_pndm.py). An example of how to use this scheduler can be found in [pipeline_pndm.py](https://github.com/huggingface/diffusers/blob/main/src/diffusers/pipelines/pipeline_pndm.py).
|
||||
@@ -1,3 +0,0 @@
|
||||
# DDPM
|
||||
|
||||
DDPM is a scheduler.
|
||||
@@ -1,46 +0,0 @@
|
||||
## Training examples
|
||||
|
||||
### Unconditional Flowers
|
||||
|
||||
The command to train a DDPM UNet model on the Oxford Flowers dataset:
|
||||
|
||||
```bash
|
||||
accelerate launch train_unconditional.py \
|
||||
--dataset="huggan/flowers-102-categories" \
|
||||
--resolution=64 \
|
||||
--output_dir="ddpm-ema-flowers-64" \
|
||||
--train_batch_size=16 \
|
||||
--num_epochs=100 \
|
||||
--gradient_accumulation_steps=1 \
|
||||
--learning_rate=1e-4 \
|
||||
--lr_warmup_steps=500 \
|
||||
--mixed_precision=no \
|
||||
--push_to_hub
|
||||
```
|
||||
|
||||
A full training run takes 2 hours on 4xV100 GPUs.
|
||||
|
||||
<img src="https://user-images.githubusercontent.com/26864830/173855866-5628989f-856b-4725-a944-d6c09490b2df.png" width="500" />
|
||||
|
||||
|
||||
### Unconditional Pokemon
|
||||
|
||||
The command to train a DDPM UNet model on the Pokemon dataset:
|
||||
|
||||
```bash
|
||||
accelerate launch train_unconditional.py \
|
||||
--dataset="huggan/pokemon" \
|
||||
--resolution=64 \
|
||||
--output_dir="ddpm-ema-pokemon-64" \
|
||||
--train_batch_size=16 \
|
||||
--num_epochs=100 \
|
||||
--gradient_accumulation_steps=1 \
|
||||
--learning_rate=1e-4 \
|
||||
--lr_warmup_steps=500 \
|
||||
--mixed_precision=no \
|
||||
--push_to_hub
|
||||
```
|
||||
|
||||
A full training run takes 2 hours on 4xV100 GPUs.
|
||||
|
||||
<img src="https://user-images.githubusercontent.com/26864830/173856733-4f117f8c-97bd-4f51-8002-56b488c96df9.png" width="500" />
|
||||
@@ -1,201 +0,0 @@
|
||||
import argparse
|
||||
import os
|
||||
|
||||
import torch
|
||||
import torch.nn.functional as F
|
||||
|
||||
import bitsandbytes as bnb
|
||||
import PIL.Image
|
||||
from accelerate import Accelerator
|
||||
from datasets import load_dataset
|
||||
from diffusers import DDPMScheduler, Glide, GlideUNetModel
|
||||
from diffusers.hub_utils import init_git_repo, push_to_hub
|
||||
from diffusers.optimization import get_scheduler
|
||||
from diffusers.utils import logging
|
||||
from torchvision.transforms import (
|
||||
CenterCrop,
|
||||
Compose,
|
||||
InterpolationMode,
|
||||
Normalize,
|
||||
RandomHorizontalFlip,
|
||||
Resize,
|
||||
ToTensor,
|
||||
)
|
||||
from tqdm.auto import tqdm
|
||||
|
||||
|
||||
logger = logging.get_logger(__name__)
|
||||
|
||||
|
||||
def main(args):
|
||||
accelerator = Accelerator(mixed_precision=args.mixed_precision)
|
||||
|
||||
pipeline = Glide.from_pretrained("fusing/glide-base")
|
||||
model = pipeline.text_unet
|
||||
noise_scheduler = DDPMScheduler(timesteps=1000, tensor_format="pt")
|
||||
optimizer = bnb.optim.Adam8bit(model.parameters(), lr=args.lr)
|
||||
|
||||
augmentations = Compose(
|
||||
[
|
||||
Resize(args.resolution, interpolation=InterpolationMode.BILINEAR),
|
||||
CenterCrop(args.resolution),
|
||||
RandomHorizontalFlip(),
|
||||
ToTensor(),
|
||||
Normalize([0.5], [0.5]),
|
||||
]
|
||||
)
|
||||
dataset = load_dataset(args.dataset, split="train")
|
||||
|
||||
text_encoder = pipeline.text_encoder.eval()
|
||||
|
||||
def transforms(examples):
|
||||
images = [augmentations(image.convert("RGB")) for image in examples["image"]]
|
||||
text_inputs = pipeline.tokenizer(examples["caption"], padding="max_length", max_length=77, return_tensors="pt")
|
||||
text_inputs = text_inputs.input_ids.to(accelerator.device)
|
||||
with torch.no_grad():
|
||||
text_embeddings = accelerator.unwrap_model(text_encoder)(text_inputs).last_hidden_state
|
||||
return {"images": images, "text_embeddings": text_embeddings}
|
||||
|
||||
dataset.set_transform(transforms)
|
||||
train_dataloader = torch.utils.data.DataLoader(dataset, batch_size=args.batch_size, shuffle=True)
|
||||
|
||||
lr_scheduler = get_scheduler(
|
||||
"linear",
|
||||
optimizer=optimizer,
|
||||
num_warmup_steps=args.warmup_steps,
|
||||
num_training_steps=(len(train_dataloader) * args.num_epochs) // args.gradient_accumulation_steps,
|
||||
)
|
||||
|
||||
model, text_encoder, optimizer, train_dataloader, lr_scheduler = accelerator.prepare(
|
||||
model, text_encoder, optimizer, train_dataloader, lr_scheduler
|
||||
)
|
||||
|
||||
if args.push_to_hub:
|
||||
repo = init_git_repo(args, at_init=True)
|
||||
|
||||
# Train!
|
||||
is_distributed = torch.distributed.is_available() and torch.distributed.is_initialized()
|
||||
world_size = torch.distributed.get_world_size() if is_distributed else 1
|
||||
total_train_batch_size = args.batch_size * args.gradient_accumulation_steps * world_size
|
||||
max_steps = len(train_dataloader) // args.gradient_accumulation_steps * args.num_epochs
|
||||
logger.info("***** Running training *****")
|
||||
logger.info(f" Num examples = {len(train_dataloader.dataset)}")
|
||||
logger.info(f" Num Epochs = {args.num_epochs}")
|
||||
logger.info(f" Instantaneous batch size per device = {args.batch_size}")
|
||||
logger.info(f" Total train batch size (w. parallel, distributed & accumulation) = {total_train_batch_size}")
|
||||
logger.info(f" Gradient Accumulation steps = {args.gradient_accumulation_steps}")
|
||||
logger.info(f" Total optimization steps = {max_steps}")
|
||||
|
||||
for epoch in range(args.num_epochs):
|
||||
model.train()
|
||||
with tqdm(total=len(train_dataloader), unit="ba") as pbar:
|
||||
pbar.set_description(f"Epoch {epoch}")
|
||||
for step, batch in enumerate(train_dataloader):
|
||||
clean_images = batch["images"]
|
||||
batch_size, n_channels, height, width = clean_images.shape
|
||||
noise_samples = torch.randn(clean_images.shape).to(clean_images.device)
|
||||
timesteps = torch.randint(
|
||||
0, noise_scheduler.timesteps, (batch_size,), device=clean_images.device
|
||||
).long()
|
||||
|
||||
# add noise onto the clean images according to the noise magnitude at each timestep
|
||||
# (this is the forward diffusion process)
|
||||
noisy_images = noise_scheduler.training_step(clean_images, noise_samples, timesteps)
|
||||
|
||||
if step % args.gradient_accumulation_steps != 0:
|
||||
with accelerator.no_sync(model):
|
||||
model_output = model(noisy_images, timesteps, batch["text_embeddings"])
|
||||
model_output, model_var_values = torch.split(model_output, n_channels, dim=1)
|
||||
# Learn the variance using the variational bound, but don't let
|
||||
# it affect our mean prediction.
|
||||
frozen_out = torch.cat([model_output.detach(), model_var_values], dim=1)
|
||||
|
||||
# predict the noise residual
|
||||
loss = F.mse_loss(model_output, noise_samples)
|
||||
|
||||
loss = loss / args.gradient_accumulation_steps
|
||||
|
||||
accelerator.backward(loss)
|
||||
optimizer.step()
|
||||
else:
|
||||
model_output = model(noisy_images, timesteps, batch["text_embeddings"])
|
||||
model_output, model_var_values = torch.split(model_output, n_channels, dim=1)
|
||||
# Learn the variance using the variational bound, but don't let
|
||||
# it affect our mean prediction.
|
||||
frozen_out = torch.cat([model_output.detach(), model_var_values], dim=1)
|
||||
|
||||
# predict the noise residual
|
||||
loss = F.mse_loss(model_output, noise_samples)
|
||||
loss = loss / args.gradient_accumulation_steps
|
||||
accelerator.backward(loss)
|
||||
torch.nn.utils.clip_grad_norm_(model.parameters(), 1.0)
|
||||
optimizer.step()
|
||||
lr_scheduler.step()
|
||||
optimizer.zero_grad()
|
||||
pbar.update(1)
|
||||
pbar.set_postfix(loss=loss.detach().item(), lr=optimizer.param_groups[0]["lr"])
|
||||
|
||||
accelerator.wait_for_everyone()
|
||||
|
||||
# Generate a sample image for visual inspection
|
||||
if accelerator.is_main_process:
|
||||
model.eval()
|
||||
with torch.no_grad():
|
||||
pipeline.unet = accelerator.unwrap_model(model)
|
||||
|
||||
generator = torch.manual_seed(0)
|
||||
# run pipeline in inference (sample random noise and denoise)
|
||||
image = pipeline("a clip art of a corgi", generator=generator, num_upscale_inference_steps=50)
|
||||
|
||||
# process image to PIL
|
||||
image_processed = image.squeeze(0)
|
||||
image_processed = ((image_processed + 1) * 127.5).round().clamp(0, 255).to(torch.uint8).cpu().numpy()
|
||||
image_pil = PIL.Image.fromarray(image_processed)
|
||||
|
||||
# save image
|
||||
test_dir = os.path.join(args.output_dir, "test_samples")
|
||||
os.makedirs(test_dir, exist_ok=True)
|
||||
image_pil.save(f"{test_dir}/{epoch:04d}.png")
|
||||
|
||||
# save the model
|
||||
if args.push_to_hub:
|
||||
push_to_hub(args, pipeline, repo, commit_message=f"Epoch {epoch}", blocking=False)
|
||||
else:
|
||||
pipeline.save_pretrained(args.output_dir)
|
||||
accelerator.wait_for_everyone()
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
parser = argparse.ArgumentParser(description="Simple example of a training script.")
|
||||
parser.add_argument("--local_rank", type=int, default=-1)
|
||||
parser.add_argument("--dataset", type=str, default="fusing/dog_captions")
|
||||
parser.add_argument("--output_dir", type=str, default="glide-text2image")
|
||||
parser.add_argument("--overwrite_output_dir", action="store_true")
|
||||
parser.add_argument("--resolution", type=int, default=64)
|
||||
parser.add_argument("--batch_size", type=int, default=4)
|
||||
parser.add_argument("--num_epochs", type=int, default=100)
|
||||
parser.add_argument("--gradient_accumulation_steps", type=int, default=4)
|
||||
parser.add_argument("--lr", type=float, default=1e-4)
|
||||
parser.add_argument("--warmup_steps", type=int, default=500)
|
||||
parser.add_argument("--push_to_hub", action="store_true")
|
||||
parser.add_argument("--hub_token", type=str, default=None)
|
||||
parser.add_argument("--hub_model_id", type=str, default=None)
|
||||
parser.add_argument("--hub_private_repo", action="store_true")
|
||||
parser.add_argument(
|
||||
"--mixed_precision",
|
||||
type=str,
|
||||
default="no",
|
||||
choices=["no", "fp16", "bf16"],
|
||||
help=(
|
||||
"Whether to use mixed precision. Choose"
|
||||
"between fp16 and bf16 (bfloat16). Bf16 requires PyTorch >= 1.10."
|
||||
"and an Nvidia Ampere GPU."
|
||||
),
|
||||
)
|
||||
|
||||
args = parser.parse_args()
|
||||
env_local_rank = int(os.environ.get("LOCAL_RANK", -1))
|
||||
if env_local_rank != -1 and env_local_rank != args.local_rank:
|
||||
args.local_rank = env_local_rank
|
||||
|
||||
main(args)
|
||||
@@ -1,216 +0,0 @@
|
||||
import argparse
|
||||
import os
|
||||
|
||||
import torch
|
||||
import torch.nn.functional as F
|
||||
|
||||
import bitsandbytes as bnb
|
||||
import PIL.Image
|
||||
from accelerate import Accelerator
|
||||
from datasets import load_dataset
|
||||
from diffusers import DDPMScheduler, LatentDiffusion, UNetLDMModel
|
||||
from diffusers.hub_utils import init_git_repo, push_to_hub
|
||||
from diffusers.optimization import get_scheduler
|
||||
from diffusers.utils import logging
|
||||
from torchvision.transforms import (
|
||||
CenterCrop,
|
||||
Compose,
|
||||
InterpolationMode,
|
||||
Normalize,
|
||||
RandomHorizontalFlip,
|
||||
Resize,
|
||||
ToTensor,
|
||||
)
|
||||
from tqdm.auto import tqdm
|
||||
|
||||
|
||||
logger = logging.get_logger(__name__)
|
||||
|
||||
|
||||
def main(args):
|
||||
accelerator = Accelerator(mixed_precision=args.mixed_precision)
|
||||
|
||||
pipeline = LatentDiffusion.from_pretrained("fusing/latent-diffusion-text2im-large")
|
||||
pipeline.unet = None # this model will be trained from scratch now
|
||||
model = UNetLDMModel(
|
||||
attention_resolutions=[4, 2, 1],
|
||||
channel_mult=[1, 2, 4, 4],
|
||||
context_dim=1280,
|
||||
conv_resample=True,
|
||||
dims=2,
|
||||
dropout=0,
|
||||
image_size=8,
|
||||
in_channels=4,
|
||||
model_channels=320,
|
||||
num_heads=8,
|
||||
num_res_blocks=2,
|
||||
out_channels=4,
|
||||
resblock_updown=False,
|
||||
transformer_depth=1,
|
||||
use_new_attention_order=False,
|
||||
use_scale_shift_norm=False,
|
||||
use_spatial_transformer=True,
|
||||
legacy=False,
|
||||
)
|
||||
noise_scheduler = DDPMScheduler(timesteps=1000, tensor_format="pt")
|
||||
optimizer = bnb.optim.Adam8bit(model.parameters(), lr=args.lr)
|
||||
|
||||
augmentations = Compose(
|
||||
[
|
||||
Resize(args.resolution, interpolation=InterpolationMode.BILINEAR),
|
||||
CenterCrop(args.resolution),
|
||||
RandomHorizontalFlip(),
|
||||
ToTensor(),
|
||||
Normalize([0.5], [0.5]),
|
||||
]
|
||||
)
|
||||
dataset = load_dataset(args.dataset, split="train")
|
||||
|
||||
text_encoder = pipeline.bert.eval()
|
||||
vqvae = pipeline.vqvae.eval()
|
||||
|
||||
def transforms(examples):
|
||||
images = [augmentations(image.convert("RGB")) for image in examples["image"]]
|
||||
text_inputs = pipeline.tokenizer(examples["caption"], padding="max_length", max_length=77, return_tensors="pt")
|
||||
with torch.no_grad():
|
||||
text_embeddings = accelerator.unwrap_model(text_encoder)(text_inputs.input_ids.cpu()).last_hidden_state
|
||||
images = 1 / 0.18215 * torch.stack(images, dim=0)
|
||||
latents = accelerator.unwrap_model(vqvae).encode(images.cpu()).mode()
|
||||
return {"images": images, "text_embeddings": text_embeddings, "latents": latents}
|
||||
|
||||
dataset.set_transform(transforms)
|
||||
train_dataloader = torch.utils.data.DataLoader(dataset, batch_size=args.batch_size, shuffle=True)
|
||||
|
||||
lr_scheduler = get_scheduler(
|
||||
"linear",
|
||||
optimizer=optimizer,
|
||||
num_warmup_steps=args.warmup_steps,
|
||||
num_training_steps=(len(train_dataloader) * args.num_epochs) // args.gradient_accumulation_steps,
|
||||
)
|
||||
|
||||
model, text_encoder, vqvae, optimizer, train_dataloader, lr_scheduler = accelerator.prepare(
|
||||
model, text_encoder, vqvae, optimizer, train_dataloader, lr_scheduler
|
||||
)
|
||||
text_encoder = text_encoder.cpu()
|
||||
vqvae = vqvae.cpu()
|
||||
|
||||
if args.push_to_hub:
|
||||
repo = init_git_repo(args, at_init=True)
|
||||
|
||||
# Train!
|
||||
is_distributed = torch.distributed.is_available() and torch.distributed.is_initialized()
|
||||
world_size = torch.distributed.get_world_size() if is_distributed else 1
|
||||
total_train_batch_size = args.batch_size * args.gradient_accumulation_steps * world_size
|
||||
max_steps = len(train_dataloader) // args.gradient_accumulation_steps * args.num_epochs
|
||||
logger.info("***** Running training *****")
|
||||
logger.info(f" Num examples = {len(train_dataloader.dataset)}")
|
||||
logger.info(f" Num Epochs = {args.num_epochs}")
|
||||
logger.info(f" Instantaneous batch size per device = {args.batch_size}")
|
||||
logger.info(f" Total train batch size (w. parallel, distributed & accumulation) = {total_train_batch_size}")
|
||||
logger.info(f" Gradient Accumulation steps = {args.gradient_accumulation_steps}")
|
||||
logger.info(f" Total optimization steps = {max_steps}")
|
||||
|
||||
global_step = 0
|
||||
for epoch in range(args.num_epochs):
|
||||
model.train()
|
||||
with tqdm(total=len(train_dataloader), unit="ba") as pbar:
|
||||
pbar.set_description(f"Epoch {epoch}")
|
||||
for step, batch in enumerate(train_dataloader):
|
||||
clean_latents = batch["latents"]
|
||||
noise_samples = torch.randn(clean_latents.shape).to(clean_latents.device)
|
||||
bsz = clean_latents.shape[0]
|
||||
timesteps = torch.randint(0, noise_scheduler.timesteps, (bsz,), device=clean_latents.device).long()
|
||||
|
||||
# add noise onto the clean latents according to the noise magnitude at each timestep
|
||||
# (this is the forward diffusion process)
|
||||
noisy_latents = noise_scheduler.training_step(clean_latents, noise_samples, timesteps)
|
||||
|
||||
if step % args.gradient_accumulation_steps != 0:
|
||||
with accelerator.no_sync(model):
|
||||
output = model(noisy_latents, timesteps, context=batch["text_embeddings"])
|
||||
# predict the noise residual
|
||||
loss = F.mse_loss(output, noise_samples)
|
||||
loss = loss / args.gradient_accumulation_steps
|
||||
accelerator.backward(loss)
|
||||
optimizer.step()
|
||||
else:
|
||||
output = model(noisy_latents, timesteps, context=batch["text_embeddings"])
|
||||
# predict the noise residual
|
||||
loss = F.mse_loss(output, noise_samples)
|
||||
loss = loss / args.gradient_accumulation_steps
|
||||
accelerator.backward(loss)
|
||||
torch.nn.utils.clip_grad_norm_(model.parameters(), 1.0)
|
||||
optimizer.step()
|
||||
lr_scheduler.step()
|
||||
optimizer.zero_grad()
|
||||
pbar.update(1)
|
||||
pbar.set_postfix(loss=loss.detach().item(), lr=optimizer.param_groups[0]["lr"])
|
||||
global_step += 1
|
||||
|
||||
accelerator.wait_for_everyone()
|
||||
|
||||
# Generate a sample image for visual inspection
|
||||
if accelerator.is_main_process:
|
||||
model.eval()
|
||||
with torch.no_grad():
|
||||
pipeline.unet = accelerator.unwrap_model(model)
|
||||
|
||||
generator = torch.manual_seed(0)
|
||||
# run pipeline in inference (sample random noise and denoise)
|
||||
image = pipeline(
|
||||
["a clip art of a corgi"], generator=generator, eta=0.3, guidance_scale=6.0, num_inference_steps=50
|
||||
)
|
||||
|
||||
# process image to PIL
|
||||
image_processed = image.cpu().permute(0, 2, 3, 1)
|
||||
image_processed = image_processed * 255.0
|
||||
image_processed = image_processed.type(torch.uint8).numpy()
|
||||
image_pil = PIL.Image.fromarray(image_processed[0])
|
||||
|
||||
# save image
|
||||
test_dir = os.path.join(args.output_dir, "test_samples")
|
||||
os.makedirs(test_dir, exist_ok=True)
|
||||
image_pil.save(f"{test_dir}/{epoch:04d}.png")
|
||||
|
||||
# save the model
|
||||
if args.push_to_hub:
|
||||
push_to_hub(args, pipeline, repo, commit_message=f"Epoch {epoch}", blocking=False)
|
||||
else:
|
||||
pipeline.save_pretrained(args.output_dir)
|
||||
accelerator.wait_for_everyone()
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
parser = argparse.ArgumentParser(description="Simple example of a training script.")
|
||||
parser.add_argument("--local_rank", type=int, default=-1)
|
||||
parser.add_argument("--dataset", type=str, default="fusing/dog_captions")
|
||||
parser.add_argument("--output_dir", type=str, default="ldm-text2image")
|
||||
parser.add_argument("--overwrite_output_dir", action="store_true")
|
||||
parser.add_argument("--resolution", type=int, default=128)
|
||||
parser.add_argument("--batch_size", type=int, default=1)
|
||||
parser.add_argument("--num_epochs", type=int, default=100)
|
||||
parser.add_argument("--gradient_accumulation_steps", type=int, default=16)
|
||||
parser.add_argument("--lr", type=float, default=1e-4)
|
||||
parser.add_argument("--warmup_steps", type=int, default=500)
|
||||
parser.add_argument("--push_to_hub", action="store_true")
|
||||
parser.add_argument("--hub_token", type=str, default=None)
|
||||
parser.add_argument("--hub_model_id", type=str, default=None)
|
||||
parser.add_argument("--hub_private_repo", action="store_true")
|
||||
parser.add_argument(
|
||||
"--mixed_precision",
|
||||
type=str,
|
||||
default="no",
|
||||
choices=["no", "fp16", "bf16"],
|
||||
help=(
|
||||
"Whether to use mixed precision. Choose"
|
||||
"between fp16 and bf16 (bfloat16). Bf16 requires PyTorch >= 1.10."
|
||||
"and an Nvidia Ampere GPU."
|
||||
),
|
||||
)
|
||||
|
||||
args = parser.parse_args()
|
||||
env_local_rank = int(os.environ.get("LOCAL_RANK", -1))
|
||||
if env_local_rank != -1 and env_local_rank != args.local_rank:
|
||||
args.local_rank = env_local_rank
|
||||
|
||||
main(args)
|
||||
@@ -1,224 +0,0 @@
|
||||
import argparse
|
||||
import os
|
||||
|
||||
import torch
|
||||
import torch.nn.functional as F
|
||||
|
||||
from accelerate import Accelerator
|
||||
from accelerate.logging import get_logger
|
||||
from datasets import load_dataset
|
||||
from diffusers import DDPMPipeline, DDPMScheduler, UNetUnconditionalModel
|
||||
from diffusers.hub_utils import init_git_repo, push_to_hub
|
||||
from diffusers.optimization import get_scheduler
|
||||
from diffusers.training_utils import EMAModel
|
||||
from torchvision.transforms import (
|
||||
CenterCrop,
|
||||
Compose,
|
||||
InterpolationMode,
|
||||
Normalize,
|
||||
RandomHorizontalFlip,
|
||||
Resize,
|
||||
ToTensor,
|
||||
)
|
||||
from tqdm.auto import tqdm
|
||||
|
||||
|
||||
logger = get_logger(__name__)
|
||||
|
||||
|
||||
def main(args):
|
||||
logging_dir = os.path.join(args.output_dir, args.logging_dir)
|
||||
accelerator = Accelerator(
|
||||
mixed_precision=args.mixed_precision,
|
||||
log_with="tensorboard",
|
||||
logging_dir=logging_dir,
|
||||
)
|
||||
|
||||
model = UNetUnconditionalModel(
|
||||
image_size=args.resolution,
|
||||
in_channels=3,
|
||||
out_channels=3,
|
||||
num_res_blocks=2,
|
||||
block_channels=(128, 128, 256, 256, 512, 512),
|
||||
down_blocks=(
|
||||
"UNetResDownBlock2D",
|
||||
"UNetResDownBlock2D",
|
||||
"UNetResDownBlock2D",
|
||||
"UNetResDownBlock2D",
|
||||
"UNetResAttnDownBlock2D",
|
||||
"UNetResDownBlock2D",
|
||||
),
|
||||
up_blocks=(
|
||||
"UNetResUpBlock2D",
|
||||
"UNetResAttnUpBlock2D",
|
||||
"UNetResUpBlock2D",
|
||||
"UNetResUpBlock2D",
|
||||
"UNetResUpBlock2D",
|
||||
"UNetResUpBlock2D",
|
||||
),
|
||||
)
|
||||
noise_scheduler = DDPMScheduler(num_train_timesteps=1000, tensor_format="pt")
|
||||
optimizer = torch.optim.AdamW(
|
||||
model.parameters(),
|
||||
lr=args.learning_rate,
|
||||
betas=(args.adam_beta1, args.adam_beta2),
|
||||
weight_decay=args.adam_weight_decay,
|
||||
eps=args.adam_epsilon,
|
||||
)
|
||||
|
||||
augmentations = Compose(
|
||||
[
|
||||
Resize(args.resolution, interpolation=InterpolationMode.BILINEAR),
|
||||
CenterCrop(args.resolution),
|
||||
RandomHorizontalFlip(),
|
||||
ToTensor(),
|
||||
Normalize([0.5], [0.5]),
|
||||
]
|
||||
)
|
||||
dataset = load_dataset(args.dataset, split="train")
|
||||
|
||||
def transforms(examples):
|
||||
images = [augmentations(image.convert("RGB")) for image in examples["image"]]
|
||||
return {"input": images}
|
||||
|
||||
dataset.set_transform(transforms)
|
||||
train_dataloader = torch.utils.data.DataLoader(dataset, batch_size=args.train_batch_size, shuffle=True)
|
||||
|
||||
lr_scheduler = get_scheduler(
|
||||
args.lr_scheduler,
|
||||
optimizer=optimizer,
|
||||
num_warmup_steps=args.lr_warmup_steps,
|
||||
num_training_steps=(len(train_dataloader) * args.num_epochs) // args.gradient_accumulation_steps,
|
||||
)
|
||||
|
||||
model, optimizer, train_dataloader, lr_scheduler = accelerator.prepare(
|
||||
model, optimizer, train_dataloader, lr_scheduler
|
||||
)
|
||||
|
||||
ema_model = EMAModel(model, inv_gamma=args.ema_inv_gamma, power=args.ema_power, max_value=args.ema_max_decay)
|
||||
|
||||
if args.push_to_hub:
|
||||
repo = init_git_repo(args, at_init=True)
|
||||
|
||||
if accelerator.is_main_process:
|
||||
run = os.path.split(__file__)[-1].split(".")[0]
|
||||
accelerator.init_trackers(run)
|
||||
|
||||
global_step = 0
|
||||
for epoch in range(args.num_epochs):
|
||||
model.train()
|
||||
progress_bar = tqdm(total=len(train_dataloader), disable=not accelerator.is_local_main_process)
|
||||
progress_bar.set_description(f"Epoch {epoch}")
|
||||
for step, batch in enumerate(train_dataloader):
|
||||
clean_images = batch["input"]
|
||||
# Sample noise that we'll add to the images
|
||||
noise = torch.randn(clean_images.shape).to(clean_images.device)
|
||||
bsz = clean_images.shape[0]
|
||||
# Sample a random timestep for each image
|
||||
timesteps = torch.randint(
|
||||
0, noise_scheduler.num_train_timesteps, (bsz,), device=clean_images.device
|
||||
).long()
|
||||
|
||||
# Add noise to the clean images according to the noise magnitude at each timestep
|
||||
# (this is the forward diffusion process)
|
||||
noisy_images = noise_scheduler.add_noise(clean_images, noise, timesteps)
|
||||
|
||||
with accelerator.accumulate(model):
|
||||
# Predict the noise residual
|
||||
noise_pred = model(noisy_images, timesteps)["sample"]
|
||||
loss = F.mse_loss(noise_pred, noise)
|
||||
accelerator.backward(loss)
|
||||
|
||||
accelerator.clip_grad_norm_(model.parameters(), 1.0)
|
||||
optimizer.step()
|
||||
lr_scheduler.step()
|
||||
if args.use_ema:
|
||||
ema_model.step(model)
|
||||
optimizer.zero_grad()
|
||||
|
||||
progress_bar.update(1)
|
||||
logs = {"loss": loss.detach().item(), "lr": lr_scheduler.get_last_lr()[0], "step": global_step}
|
||||
if args.use_ema:
|
||||
logs["ema_decay"] = ema_model.decay
|
||||
progress_bar.set_postfix(**logs)
|
||||
accelerator.log(logs, step=global_step)
|
||||
global_step += 1
|
||||
progress_bar.close()
|
||||
|
||||
accelerator.wait_for_everyone()
|
||||
|
||||
# Generate a sample image for visual inspection
|
||||
if accelerator.is_main_process:
|
||||
with torch.no_grad():
|
||||
pipeline = DDPMPipeline(
|
||||
unet=accelerator.unwrap_model(ema_model.averaged_model if args.use_ema else model),
|
||||
scheduler=noise_scheduler,
|
||||
)
|
||||
|
||||
generator = torch.manual_seed(0)
|
||||
# run pipeline in inference (sample random noise and denoise)
|
||||
images = pipeline(generator=generator, batch_size=args.eval_batch_size)
|
||||
|
||||
# denormalize the images and save to tensorboard
|
||||
images_processed = (images.cpu() + 1.0) * 127.5
|
||||
images_processed = images_processed.clamp(0, 255).type(torch.uint8).numpy()
|
||||
|
||||
accelerator.trackers[0].writer.add_images("test_samples", images_processed, epoch)
|
||||
|
||||
if epoch % args.save_model_epochs == 0 or epoch == args.num_epochs - 1:
|
||||
# save the model
|
||||
if args.push_to_hub:
|
||||
push_to_hub(args, pipeline, repo, commit_message=f"Epoch {epoch}", blocking=False)
|
||||
else:
|
||||
pipeline.save_pretrained(args.output_dir)
|
||||
accelerator.wait_for_everyone()
|
||||
|
||||
accelerator.end_training()
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
parser = argparse.ArgumentParser(description="Simple example of a training script.")
|
||||
parser.add_argument("--local_rank", type=int, default=-1)
|
||||
parser.add_argument("--dataset", type=str, default="huggan/flowers-102-categories")
|
||||
parser.add_argument("--output_dir", type=str, default="ddpm-flowers-64")
|
||||
parser.add_argument("--overwrite_output_dir", action="store_true")
|
||||
parser.add_argument("--resolution", type=int, default=64)
|
||||
parser.add_argument("--train_batch_size", type=int, default=16)
|
||||
parser.add_argument("--eval_batch_size", type=int, default=16)
|
||||
parser.add_argument("--num_epochs", type=int, default=100)
|
||||
parser.add_argument("--save_model_epochs", type=int, default=5)
|
||||
parser.add_argument("--gradient_accumulation_steps", type=int, default=1)
|
||||
parser.add_argument("--learning_rate", type=float, default=1e-4)
|
||||
parser.add_argument("--lr_scheduler", type=str, default="cosine")
|
||||
parser.add_argument("--lr_warmup_steps", type=int, default=500)
|
||||
parser.add_argument("--adam_beta1", type=float, default=0.95)
|
||||
parser.add_argument("--adam_beta2", type=float, default=0.999)
|
||||
parser.add_argument("--adam_weight_decay", type=float, default=1e-6)
|
||||
parser.add_argument("--adam_epsilon", type=float, default=1e-3)
|
||||
parser.add_argument("--use_ema", action="store_true", default=True)
|
||||
parser.add_argument("--ema_inv_gamma", type=float, default=1.0)
|
||||
parser.add_argument("--ema_power", type=float, default=3 / 4)
|
||||
parser.add_argument("--ema_max_decay", type=float, default=0.9999)
|
||||
parser.add_argument("--push_to_hub", action="store_true")
|
||||
parser.add_argument("--hub_token", type=str, default=None)
|
||||
parser.add_argument("--hub_model_id", type=str, default=None)
|
||||
parser.add_argument("--hub_private_repo", action="store_true")
|
||||
parser.add_argument("--logging_dir", type=str, default="logs")
|
||||
parser.add_argument(
|
||||
"--mixed_precision",
|
||||
type=str,
|
||||
default="no",
|
||||
choices=["no", "fp16", "bf16"],
|
||||
help=(
|
||||
"Whether to use mixed precision. Choose"
|
||||
"between fp16 and bf16 (bfloat16). Bf16 requires PyTorch >= 1.10."
|
||||
"and an Nvidia Ampere GPU."
|
||||
),
|
||||
)
|
||||
|
||||
args = parser.parse_args()
|
||||
env_local_rank = int(os.environ.get("LOCAL_RANK", -1))
|
||||
if env_local_rank != -1 and env_local_rank != args.local_rank:
|
||||
args.local_rank = env_local_rank
|
||||
|
||||
main(args)
|
||||
0
models/audio/fastdiff/README.md
Normal file
0
models/audio/fastdiff/README.md
Normal file
0
models/audio/fastdiff/modeling_fastdiff.py
Normal file
0
models/audio/fastdiff/modeling_fastdiff.py
Normal file
0
models/audio/fastdiff/run_fastdiff.py
Normal file
0
models/audio/fastdiff/run_fastdiff.py
Normal file
0
models/vision/__init__.py
Normal file
0
models/vision/__init__.py
Normal file
0
models/vision/dalle2/README.md
Normal file
0
models/vision/dalle2/README.md
Normal file
0
models/vision/dalle2/modeling_dalle2.py
Normal file
0
models/vision/dalle2/modeling_dalle2.py
Normal file
0
models/vision/dalle2/run_dalle2.py
Normal file
0
models/vision/dalle2/run_dalle2.py
Normal file
30
models/vision/ddpm/README.md
Normal file
30
models/vision/ddpm/README.md
Normal file
@@ -0,0 +1,30 @@
|
||||
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
|
||||
|
||||
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
|
||||
the License. You may obtain a copy of the License at
|
||||
|
||||
http://www.apache.org/licenses/LICENSE-2.0
|
||||
|
||||
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
|
||||
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
|
||||
specific language governing permissions and limitations under the License.
|
||||
-->
|
||||
|
||||
# Denoising Diffusion Probabilistic Models (DDPM)
|
||||
|
||||
## Overview
|
||||
|
||||
DDPM was proposed in [Denoising Diffusion Probabilistic Models](https://arxiv.org/abs/2006.11239) by *Jonathan Ho, Ajay Jain, Pieter Abbeel*.
|
||||
|
||||
The abstract from the paper is the following:
|
||||
|
||||
*We present high quality image synthesis results using diffusion probabilistic models, a class of latent variable models inspired by considerations from nonequilibrium thermodynamics. Our best results are obtained by training on a weighted variational bound designed according to a novel connection between diffusion probabilistic models and denoising score matching with Langevin dynamics, and our models naturally admit a progressive lossy decompression scheme that can be interpreted as a generalization of autoregressive decoding. On the unconditional CIFAR10 dataset, we obtain an Inception score of 9.46 and a state-of-the-art FID score of 3.17. On 256x256 LSUN, we obtain sample quality similar to ProgressiveGAN. Our implementation is available at this https URL*
|
||||
|
||||
Tips:
|
||||
|
||||
- ...
|
||||
- ...
|
||||
|
||||
This model was contributed by [???](https://huggingface.co/???). The original code can be found [here](https://github.com/hojonathanho/diffusion).
|
||||
|
||||
|
||||
23
models/vision/ddpm/example.py
Executable file
23
models/vision/ddpm/example.py
Executable file
@@ -0,0 +1,23 @@
|
||||
#!/usr/bin/env python3
|
||||
import os
|
||||
import pathlib
|
||||
from modeling_ddpm import DDPM
|
||||
import PIL.Image
|
||||
import numpy as np
|
||||
|
||||
model_ids = ["ddpm-lsun-cat", "ddpm-lsun-cat-ema", "ddpm-lsun-church-ema", "ddpm-lsun-church", "ddpm-lsun-bedroom", "ddpm-lsun-bedroom-ema", "ddpm-cifar10-ema", "ddpm-cifar10", "ddpm-celeba-hq", "ddpm-celeba-hq-ema"]
|
||||
|
||||
for model_id in model_ids:
|
||||
path = os.path.join("/home/patrick/images/hf", model_id)
|
||||
pathlib.Path(path).mkdir(parents=True, exist_ok=True)
|
||||
|
||||
ddpm = DDPM.from_pretrained("fusing/" + model_id)
|
||||
image = ddpm(batch_size=4)
|
||||
|
||||
image_processed = image.cpu().permute(0, 2, 3, 1)
|
||||
image_processed = (image_processed + 1.0) * 127.5
|
||||
image_processed = image_processed.numpy().astype(np.uint8)
|
||||
|
||||
for i in range(image_processed.shape[0]):
|
||||
image_pil = PIL.Image.fromarray(image_processed[i])
|
||||
image_pil.save(os.path.join(path, f"image_{i}.png"))
|
||||
61
models/vision/ddpm/modeling_ddpm.py
Normal file
61
models/vision/ddpm/modeling_ddpm.py
Normal file
@@ -0,0 +1,61 @@
|
||||
# Copyright 2022 The HuggingFace Team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
|
||||
# limitations under the License.
|
||||
|
||||
|
||||
from diffusers import DiffusionPipeline
|
||||
import tqdm
|
||||
import torch
|
||||
|
||||
|
||||
class DDPM(DiffusionPipeline):
|
||||
|
||||
modeling_file = "modeling_ddpm.py"
|
||||
|
||||
def __init__(self, unet, noise_scheduler):
|
||||
super().__init__()
|
||||
self.register_modules(unet=unet, noise_scheduler=noise_scheduler)
|
||||
|
||||
def __call__(self, batch_size=1, generator=None, torch_device=None):
|
||||
if torch_device is None:
|
||||
torch_device = "cuda" if torch.cuda.is_available() else "cpu"
|
||||
|
||||
self.unet.to(torch_device)
|
||||
# 1. Sample gaussian noise
|
||||
image = self.noise_scheduler.sample_noise((batch_size, self.unet.in_channels, self.unet.resolution, self.unet.resolution), device=torch_device, generator=generator)
|
||||
for t in tqdm.tqdm(reversed(range(len(self.noise_scheduler))), total=len(self.noise_scheduler)):
|
||||
# i) define coefficients for time step t
|
||||
clipped_image_coeff = 1 / torch.sqrt(self.noise_scheduler.get_alpha_prod(t))
|
||||
clipped_noise_coeff = torch.sqrt(1 / self.noise_scheduler.get_alpha_prod(t) - 1)
|
||||
image_coeff = (1 - self.noise_scheduler.get_alpha_prod(t - 1)) * torch.sqrt(self.noise_scheduler.get_alpha(t)) / (1 - self.noise_scheduler.get_alpha_prod(t))
|
||||
clipped_coeff = torch.sqrt(self.noise_scheduler.get_alpha_prod(t - 1)) * self.noise_scheduler.get_beta(t) / (1 - self.noise_scheduler.get_alpha_prod(t))
|
||||
|
||||
# ii) predict noise residual
|
||||
with torch.no_grad():
|
||||
noise_residual = self.unet(image, t)
|
||||
|
||||
# iii) compute predicted image from residual
|
||||
# See 2nd formula at https://github.com/hojonathanho/diffusion/issues/5#issue-896554416 for comparison
|
||||
pred_mean = clipped_image_coeff * image - clipped_noise_coeff * noise_residual
|
||||
pred_mean = torch.clamp(pred_mean, -1, 1)
|
||||
prev_image = clipped_coeff * pred_mean + image_coeff * image
|
||||
|
||||
# iv) sample variance
|
||||
prev_variance = self.noise_scheduler.sample_variance(t, prev_image.shape, device=torch_device, generator=generator)
|
||||
|
||||
# v) sample x_{t-1} ~ N(prev_image, prev_variance)
|
||||
sampled_prev_image = prev_image + prev_variance
|
||||
image = sampled_prev_image
|
||||
|
||||
return image
|
||||
17
models/vision/ddpm/run_ddpm.py
Executable file
17
models/vision/ddpm/run_ddpm.py
Executable file
@@ -0,0 +1,17 @@
|
||||
#!/usr/bin/env python3
|
||||
import torch
|
||||
|
||||
from diffusers import GaussianDDPMScheduler, UNetModel
|
||||
|
||||
|
||||
model = UNetModel(dim=64, dim_mults=(1, 2, 4, 8))
|
||||
|
||||
diffusion = GaussianDDPMScheduler(model, image_size=128, timesteps=1000, loss_type="l1") # number of steps # L1 or L2
|
||||
|
||||
training_images = torch.randn(8, 3, 128, 128) # your images need to be normalized from a range of -1 to +1
|
||||
loss = diffusion(training_images)
|
||||
loss.backward()
|
||||
# after a lot of training
|
||||
|
||||
sampled_images = diffusion.sample(batch_size=4)
|
||||
sampled_images.shape # (4, 3, 128, 128)
|
||||
0
models/vision/glide/README.md
Normal file
0
models/vision/glide/README.md
Normal file
60
models/vision/glide/convert_weights.py
Normal file
60
models/vision/glide/convert_weights.py
Normal file
@@ -0,0 +1,60 @@
|
||||
import argparse
|
||||
|
||||
import torch
|
||||
from torch import nn
|
||||
|
||||
from transformers import CLIPTextConfig, CLIPTextModel, GPT2Tokenizer
|
||||
|
||||
# wget https://openaipublic.blob.core.windows.net/diffusion/dec-2021/base.pt
|
||||
state_dict = torch.load("base.pt", map_location="cpu")
|
||||
state_dict = {k: nn.Parameter(v) for k, v in state_dict.items()}
|
||||
config = CLIPTextConfig(
|
||||
hidden_size=512,
|
||||
intermediate_size=2048,
|
||||
num_hidden_layers=16,
|
||||
num_attention_heads=8,
|
||||
max_position_embeddings=128
|
||||
)
|
||||
model = CLIPTextModel(config).eval()
|
||||
tokenizer = GPT2Tokenizer("./glide-base/vocab.json", "./glide-base/merges.txt", pad_token="<|endoftext|>")
|
||||
tokenizer.save_pretrained("./glide-base")
|
||||
|
||||
hf_encoder = model.text_model
|
||||
|
||||
hf_encoder.embeddings.token_embedding.weight = state_dict["token_embedding.weight"]
|
||||
hf_encoder.embeddings.position_embedding.weight.data = state_dict["positional_embedding"]
|
||||
hf_encoder.embeddings.padding_embedding.weight.data = state_dict["padding_embedding"]
|
||||
|
||||
hf_encoder.final_layer_norm.weight = state_dict["final_ln.weight"]
|
||||
hf_encoder.final_layer_norm.bias = state_dict["final_ln.bias"]
|
||||
|
||||
for layer_idx in range(config.num_hidden_layers):
|
||||
hf_layer = hf_encoder.encoder.layers[layer_idx]
|
||||
q_proj, k_proj, v_proj = state_dict[f"transformer.resblocks.{layer_idx}.attn.c_qkv.weight"].chunk(3, dim=0)
|
||||
q_proj_bias, k_proj_bias, v_proj_bias = state_dict[f"transformer.resblocks.{layer_idx}.attn.c_qkv.bias"].chunk(3, dim=0)
|
||||
|
||||
hf_layer.self_attn.q_proj.weight.data = q_proj
|
||||
hf_layer.self_attn.q_proj.bias.data = q_proj_bias
|
||||
hf_layer.self_attn.k_proj.weight.data = k_proj
|
||||
hf_layer.self_attn.k_proj.bias.data = k_proj_bias
|
||||
hf_layer.self_attn.v_proj.weight.data = v_proj
|
||||
hf_layer.self_attn.v_proj.bias.data = v_proj_bias
|
||||
|
||||
hf_layer.self_attn.out_proj.weight = state_dict[f"transformer.resblocks.{layer_idx}.attn.c_proj.weight"]
|
||||
hf_layer.self_attn.out_proj.bias = state_dict[f"transformer.resblocks.{layer_idx}.attn.c_proj.bias"]
|
||||
|
||||
hf_layer.layer_norm1.weight = state_dict[f"transformer.resblocks.{layer_idx}.ln_1.weight"]
|
||||
hf_layer.layer_norm1.bias = state_dict[f"transformer.resblocks.{layer_idx}.ln_1.bias"]
|
||||
hf_layer.layer_norm2.weight = state_dict[f"transformer.resblocks.{layer_idx}.ln_2.weight"]
|
||||
hf_layer.layer_norm2.bias = state_dict[f"transformer.resblocks.{layer_idx}.ln_2.bias"]
|
||||
|
||||
hf_layer.mlp.fc1.weight = state_dict[f"transformer.resblocks.{layer_idx}.mlp.c_fc.weight"]
|
||||
hf_layer.mlp.fc1.bias = state_dict[f"transformer.resblocks.{layer_idx}.mlp.c_fc.bias"]
|
||||
hf_layer.mlp.fc2.weight = state_dict[f"transformer.resblocks.{layer_idx}.mlp.c_proj.weight"]
|
||||
hf_layer.mlp.fc2.bias = state_dict[f"transformer.resblocks.{layer_idx}.mlp.c_proj.bias"]
|
||||
|
||||
inputs = tokenizer(["an oil painting of a corgi", ""], padding="max_length", max_length=128, return_tensors="pt")
|
||||
with torch.no_grad():
|
||||
outputs = model(**inputs)
|
||||
|
||||
model.save_pretrained("./glide-base")
|
||||
59
models/vision/glide/modeling_glide.py
Normal file
59
models/vision/glide/modeling_glide.py
Normal file
@@ -0,0 +1,59 @@
|
||||
# Copyright 2022 The HuggingFace Team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
|
||||
# limitations under the License.
|
||||
|
||||
|
||||
from diffusers import DiffusionPipeline
|
||||
from diffusers import UNetGLIDEModel
|
||||
|
||||
import tqdm
|
||||
import torch
|
||||
|
||||
|
||||
class GLIDE(DiffusionPipeline):
|
||||
def __init__(self, unet: UNetGLIDEModel, noise_scheduler):
|
||||
super().__init__()
|
||||
self.register_modules(unet=unet, noise_scheduler=noise_scheduler)
|
||||
|
||||
def __call__(self, generator=None, torch_device=None):
|
||||
torch_device = "cuda" if torch.cuda.is_available() else "cpu"
|
||||
|
||||
self.unet.to(torch_device)
|
||||
# 1. Sample gaussian noise
|
||||
image = self.noise_scheduler.sample_noise((1, self.unet.in_channels, self.unet.resolution, self.unet.resolution), device=torch_device, generator=generator)
|
||||
for t in tqdm.tqdm(reversed(range(len(self.noise_scheduler))), total=len(self.noise_scheduler)):
|
||||
# i) define coefficients for time step t
|
||||
clip_image_coeff = 1 / torch.sqrt(self.noise_scheduler.get_alpha_prod(t))
|
||||
clip_noise_coeff = torch.sqrt(1 / self.noise_scheduler.get_alpha_prod(t) - 1)
|
||||
image_coeff = (1 - self.noise_scheduler.get_alpha_prod(t - 1)) * torch.sqrt(self.noise_scheduler.get_alpha(t)) / (1 - self.noise_scheduler.get_alpha_prod(t))
|
||||
clip_coeff = torch.sqrt(self.noise_scheduler.get_alpha_prod(t - 1)) * self.noise_scheduler.get_beta(t) / (1 - self.noise_scheduler.get_alpha_prod(t))
|
||||
|
||||
# ii) predict noise residual
|
||||
with torch.no_grad():
|
||||
noise_residual = self.unet(image, t)
|
||||
|
||||
# iii) compute predicted image from residual
|
||||
# See 2nd formula at https://github.com/hojonathanho/diffusion/issues/5#issue-896554416 for comparison
|
||||
pred_mean = clip_image_coeff * image - clip_noise_coeff * noise_residual
|
||||
pred_mean = torch.clamp(pred_mean, -1, 1)
|
||||
prev_image = clip_coeff * pred_mean + image_coeff * image
|
||||
|
||||
# iv) sample variance
|
||||
prev_variance = self.noise_scheduler.sample_variance(t, prev_image.shape, device=torch_device, generator=generator)
|
||||
|
||||
# v) sample x_{t-1} ~ N(prev_image, prev_variance)
|
||||
sampled_prev_image = prev_image + prev_variance
|
||||
image = sampled_prev_image
|
||||
|
||||
return image
|
||||
17
models/vision/glide/run_glide.py
Normal file
17
models/vision/glide/run_glide.py
Normal file
@@ -0,0 +1,17 @@
|
||||
import torch
|
||||
from .modeling_glide import GLIDE
|
||||
from diffusers import UNetGLIDEModel, GaussianDDPMScheduler
|
||||
|
||||
generator = torch.Generator()
|
||||
generator = generator.manual_seed(0)
|
||||
|
||||
# 1. Load models
|
||||
|
||||
scheduler = GaussianDDPMScheduler.from_config("fusing/glide-base")
|
||||
model = UNetGLIDEModel.from_pretrained("fusing/glide-base")
|
||||
|
||||
pipeline = GLIDE(model, scheduler)
|
||||
|
||||
img = pipeline(generator)
|
||||
|
||||
print(img)
|
||||
0
models/vision/imagen/README.md
Normal file
0
models/vision/imagen/README.md
Normal file
0
models/vision/imagen/modeling_dalle2.py
Normal file
0
models/vision/imagen/modeling_dalle2.py
Normal file
0
models/vision/imagen/run_dalle2.py
Normal file
0
models/vision/imagen/run_dalle2.py
Normal file
0
models/vision/latent_diffusion/README.md
Normal file
0
models/vision/latent_diffusion/README.md
Normal file
@@ -1,112 +0,0 @@
|
||||
# coding=utf-8
|
||||
# Copyright 2022 The HuggingFace Inc. team.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
""" Conversion script for the LDM checkpoints. """
|
||||
|
||||
import argparse
|
||||
import os
|
||||
import json
|
||||
import torch
|
||||
from diffusers import UNet2DModel, UNet2DConditionModel
|
||||
from transformers.file_utils import has_file
|
||||
|
||||
do_only_config = False
|
||||
do_only_weights = True
|
||||
do_only_renaming = False
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
parser = argparse.ArgumentParser()
|
||||
|
||||
parser.add_argument(
|
||||
"--repo_path",
|
||||
default=None,
|
||||
type=str,
|
||||
required=True,
|
||||
help="The config json file corresponding to the architecture.",
|
||||
)
|
||||
|
||||
parser.add_argument(
|
||||
"--dump_path", default=None, type=str, required=True, help="Path to the output model."
|
||||
)
|
||||
|
||||
args = parser.parse_args()
|
||||
|
||||
config_parameters_to_change = {
|
||||
"image_size": "sample_size",
|
||||
"num_res_blocks": "layers_per_block",
|
||||
"block_channels": "block_out_channels",
|
||||
"down_blocks": "down_block_types",
|
||||
"up_blocks": "up_block_types",
|
||||
"downscale_freq_shift": "freq_shift",
|
||||
"resnet_num_groups": "norm_num_groups",
|
||||
"resnet_act_fn": "act_fn",
|
||||
"resnet_eps": "norm_eps",
|
||||
"num_head_channels": "attention_head_dim",
|
||||
}
|
||||
|
||||
key_parameters_to_change = {
|
||||
"time_steps": "time_proj",
|
||||
"mid": "mid_block",
|
||||
"downsample_blocks": "down_blocks",
|
||||
"upsample_blocks": "up_blocks",
|
||||
}
|
||||
|
||||
subfolder = "" if has_file(args.repo_path, "config.json") else "unet"
|
||||
|
||||
with open(os.path.join(args.repo_path, subfolder, "config.json"), "r", encoding="utf-8") as reader:
|
||||
text = reader.read()
|
||||
config = json.loads(text)
|
||||
|
||||
if do_only_config:
|
||||
for key in config_parameters_to_change.keys():
|
||||
config.pop(key, None)
|
||||
|
||||
if has_file(args.repo_path, "config.json"):
|
||||
model = UNet2DModel(**config)
|
||||
else:
|
||||
class_name = UNet2DConditionModel if "ldm-text2im-large-256" in args.repo_path else UNet2DModel
|
||||
model = class_name(**config)
|
||||
|
||||
if do_only_config:
|
||||
model.save_config(os.path.join(args.repo_path, subfolder))
|
||||
|
||||
config = dict(model.config)
|
||||
|
||||
if do_only_renaming:
|
||||
for key, value in config_parameters_to_change.items():
|
||||
if key in config:
|
||||
config[value] = config[key]
|
||||
del config[key]
|
||||
|
||||
config["down_block_types"] = [k.replace("UNetRes", "") for k in config["down_block_types"]]
|
||||
config["up_block_types"] = [k.replace("UNetRes", "") for k in config["up_block_types"]]
|
||||
|
||||
if do_only_weights:
|
||||
state_dict = torch.load(os.path.join(args.repo_path, subfolder, "diffusion_pytorch_model.bin"))
|
||||
|
||||
new_state_dict = {}
|
||||
for param_key, param_value in state_dict.items():
|
||||
if param_key.endswith(".op.bias") or param_key.endswith(".op.weight"):
|
||||
continue
|
||||
has_changed = False
|
||||
for key, new_key in key_parameters_to_change.items():
|
||||
if not has_changed and param_key.split(".")[0] == key:
|
||||
new_state_dict[".".join([new_key] + param_key.split(".")[1:])] = param_value
|
||||
has_changed = True
|
||||
if not has_changed:
|
||||
new_state_dict[param_key] = param_value
|
||||
|
||||
model.load_state_dict(new_state_dict)
|
||||
model.save_pretrained(os.path.join(args.repo_path, subfolder))
|
||||
@@ -1,56 +0,0 @@
|
||||
import argparse
|
||||
|
||||
import OmegaConf
|
||||
import torch
|
||||
|
||||
from diffusers import UNetLDMModel, VQModel, LDMPipeline, DDIMScheduler
|
||||
|
||||
def convert_ldm_original(checkpoint_path, config_path, output_path):
|
||||
config = OmegaConf.load(config_path)
|
||||
state_dict = torch.load(checkpoint_path, map_location="cpu")["model"]
|
||||
keys = list(state_dict.keys())
|
||||
|
||||
# extract state_dict for VQVAE
|
||||
first_stage_dict = {}
|
||||
first_stage_key = "first_stage_model."
|
||||
for key in keys:
|
||||
if key.startswith(first_stage_key):
|
||||
first_stage_dict[key.replace(first_stage_key, "")] = state_dict[key]
|
||||
|
||||
# extract state_dict for UNetLDM
|
||||
unet_state_dict = {}
|
||||
unet_key = "model.diffusion_model."
|
||||
for key in keys:
|
||||
if key.startswith(unet_key):
|
||||
unet_state_dict[key.replace(unet_key, "")] = state_dict[key]
|
||||
|
||||
vqvae_init_args = config.model.params.first_stage_config.params
|
||||
unet_init_args = config.model.params.unet_config.params
|
||||
|
||||
vqvae = VQModel(**vqvae_init_args).eval()
|
||||
vqvae.load_state_dict(first_stage_dict)
|
||||
|
||||
unet = UNetLDMModel(**unet_init_args).eval()
|
||||
unet.load_state_dict(unet_state_dict)
|
||||
|
||||
noise_scheduler = DDIMScheduler(
|
||||
timesteps=config.model.params.timesteps,
|
||||
beta_schedule="scaled_linear",
|
||||
beta_start=config.model.params.linear_start,
|
||||
beta_end=config.model.params.linear_end,
|
||||
clip_sample=False,
|
||||
)
|
||||
|
||||
pipeline = LDMPipeline(vqvae, unet, noise_scheduler)
|
||||
pipeline.save_pretrained(output_path)
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
parser = argparse.ArgumentParser()
|
||||
parser.add_argument("--checkpoint_path", type=str, required=True)
|
||||
parser.add_argument("--config_path", type=str, required=True)
|
||||
parser.add_argument("--output_path", type=str, required=True)
|
||||
args = parser.parse_args()
|
||||
|
||||
convert_ldm_original(args.checkpoint_path, args.config_path, args.output_path)
|
||||
|
||||
@@ -1,234 +0,0 @@
|
||||
from diffusers import UNet2DModel, DDPMScheduler, DDPMPipeline
|
||||
import argparse
|
||||
import json
|
||||
import torch
|
||||
|
||||
|
||||
def shave_segments(path, n_shave_prefix_segments=1):
|
||||
"""
|
||||
Removes segments. Positive values shave the first segments, negative shave the last segments.
|
||||
"""
|
||||
if n_shave_prefix_segments >= 0:
|
||||
return '.'.join(path.split('.')[n_shave_prefix_segments:])
|
||||
else:
|
||||
return '.'.join(path.split('.')[:n_shave_prefix_segments])
|
||||
|
||||
|
||||
def renew_resnet_paths(old_list, n_shave_prefix_segments=0):
|
||||
mapping = []
|
||||
for old_item in old_list:
|
||||
new_item = old_item
|
||||
new_item = new_item.replace('block.', 'resnets.')
|
||||
new_item = new_item.replace('conv_shorcut', 'conv1')
|
||||
new_item = new_item.replace('nin_shortcut', 'conv_shortcut')
|
||||
new_item = new_item.replace('temb_proj', 'time_emb_proj')
|
||||
|
||||
new_item = shave_segments(new_item, n_shave_prefix_segments=n_shave_prefix_segments)
|
||||
|
||||
mapping.append({'old': old_item, 'new': new_item})
|
||||
|
||||
return mapping
|
||||
|
||||
|
||||
def renew_attention_paths(old_list, n_shave_prefix_segments=0, in_mid=False):
|
||||
mapping = []
|
||||
for old_item in old_list:
|
||||
new_item = old_item
|
||||
|
||||
# In `model.mid`, the layer is called `attn`.
|
||||
if not in_mid:
|
||||
new_item = new_item.replace('attn', 'attentions')
|
||||
new_item = new_item.replace('.k.', '.key.')
|
||||
new_item = new_item.replace('.v.', '.value.')
|
||||
new_item = new_item.replace('.q.', '.query.')
|
||||
|
||||
new_item = new_item.replace('proj_out', 'proj_attn')
|
||||
new_item = new_item.replace('norm', 'group_norm')
|
||||
|
||||
new_item = shave_segments(new_item, n_shave_prefix_segments=n_shave_prefix_segments)
|
||||
mapping.append({'old': old_item, 'new': new_item})
|
||||
|
||||
return mapping
|
||||
|
||||
|
||||
def assign_to_checkpoint(paths, checkpoint, old_checkpoint, attention_paths_to_split=None, additional_replacements=None, config=None):
|
||||
assert isinstance(paths, list), "Paths should be a list of dicts containing 'old' and 'new' keys."
|
||||
|
||||
if attention_paths_to_split is not None:
|
||||
if config is None:
|
||||
raise ValueError("Please specify the config if setting 'attention_paths_to_split' to 'True'.")
|
||||
|
||||
for path, path_map in attention_paths_to_split.items():
|
||||
old_tensor = old_checkpoint[path]
|
||||
channels = old_tensor.shape[0] // 3
|
||||
|
||||
target_shape = (-1, channels) if len(old_tensor.shape) == 3 else (-1)
|
||||
|
||||
num_heads = old_tensor.shape[0] // config["num_head_channels"] // 3
|
||||
|
||||
old_tensor = old_tensor.reshape((num_heads, 3 * channels // num_heads) + old_tensor.shape[1:])
|
||||
query, key, value = old_tensor.split(channels // num_heads, dim=1)
|
||||
|
||||
checkpoint[path_map['query']] = query.reshape(target_shape).squeeze()
|
||||
checkpoint[path_map['key']] = key.reshape(target_shape).squeeze()
|
||||
checkpoint[path_map['value']] = value.reshape(target_shape).squeeze()
|
||||
|
||||
for path in paths:
|
||||
new_path = path['new']
|
||||
|
||||
if attention_paths_to_split is not None and new_path in attention_paths_to_split:
|
||||
continue
|
||||
|
||||
new_path = new_path.replace('down.', 'downsample_blocks.')
|
||||
new_path = new_path.replace('up.', 'up_blocks.')
|
||||
|
||||
if additional_replacements is not None:
|
||||
for replacement in additional_replacements:
|
||||
new_path = new_path.replace(replacement['old'], replacement['new'])
|
||||
|
||||
if 'attentions' in new_path:
|
||||
checkpoint[new_path] = old_checkpoint[path['old']].squeeze()
|
||||
else:
|
||||
checkpoint[new_path] = old_checkpoint[path['old']]
|
||||
|
||||
|
||||
def convert_ddpm_checkpoint(checkpoint, config):
|
||||
"""
|
||||
Takes a state dict and a config, and returns a converted checkpoint.
|
||||
"""
|
||||
new_checkpoint = {}
|
||||
|
||||
new_checkpoint['time_embedding.linear_1.weight'] = checkpoint['temb.dense.0.weight']
|
||||
new_checkpoint['time_embedding.linear_1.bias'] = checkpoint['temb.dense.0.bias']
|
||||
new_checkpoint['time_embedding.linear_2.weight'] = checkpoint['temb.dense.1.weight']
|
||||
new_checkpoint['time_embedding.linear_2.bias'] = checkpoint['temb.dense.1.bias']
|
||||
|
||||
new_checkpoint['conv_norm_out.weight'] = checkpoint['norm_out.weight']
|
||||
new_checkpoint['conv_norm_out.bias'] = checkpoint['norm_out.bias']
|
||||
|
||||
new_checkpoint['conv_in.weight'] = checkpoint['conv_in.weight']
|
||||
new_checkpoint['conv_in.bias'] = checkpoint['conv_in.bias']
|
||||
new_checkpoint['conv_out.weight'] = checkpoint['conv_out.weight']
|
||||
new_checkpoint['conv_out.bias'] = checkpoint['conv_out.bias']
|
||||
|
||||
num_downsample_blocks = len({'.'.join(layer.split('.')[:2]) for layer in checkpoint if 'down' in layer})
|
||||
downsample_blocks = {layer_id: [key for key in checkpoint if f'down.{layer_id}' in key] for layer_id in range(num_downsample_blocks)}
|
||||
|
||||
num_up_blocks = len({'.'.join(layer.split('.')[:2]) for layer in checkpoint if 'up' in layer})
|
||||
up_blocks = {layer_id: [key for key in checkpoint if f'up.{layer_id}' in key] for layer_id in range(num_up_blocks)}
|
||||
|
||||
for i in range(num_downsample_blocks):
|
||||
block_id = (i - 1) // (config['num_res_blocks'] + 1)
|
||||
|
||||
if any('downsample' in layer for layer in downsample_blocks[i]):
|
||||
new_checkpoint[f'downsample_blocks.{i}.downsamplers.0.conv.weight'] = checkpoint[f'down.{i}.downsample.conv.weight']
|
||||
new_checkpoint[f'downsample_blocks.{i}.downsamplers.0.conv.bias'] = checkpoint[f'down.{i}.downsample.conv.bias']
|
||||
new_checkpoint[f'downsample_blocks.{i}.downsamplers.0.op.weight'] = checkpoint[f'down.{i}.downsample.conv.weight']
|
||||
new_checkpoint[f'downsample_blocks.{i}.downsamplers.0.op.bias'] = checkpoint[f'down.{i}.downsample.conv.bias']
|
||||
|
||||
if any('block' in layer for layer in downsample_blocks[i]):
|
||||
num_blocks = len({'.'.join(shave_segments(layer, 2).split('.')[:2]) for layer in downsample_blocks[i] if 'block' in layer})
|
||||
blocks = {layer_id: [key for key in downsample_blocks[i] if f'block.{layer_id}' in key] for layer_id in range(num_blocks)}
|
||||
|
||||
if num_blocks > 0:
|
||||
for j in range(config['num_res_blocks']):
|
||||
paths = renew_resnet_paths(blocks[j])
|
||||
assign_to_checkpoint(paths, new_checkpoint, checkpoint)
|
||||
|
||||
if any('attn' in layer for layer in downsample_blocks[i]):
|
||||
num_attn = len({'.'.join(shave_segments(layer, 2).split('.')[:2]) for layer in downsample_blocks[i] if 'attn' in layer})
|
||||
attns = {layer_id: [key for key in downsample_blocks[i] if f'attn.{layer_id}' in key] for layer_id in range(num_blocks)}
|
||||
|
||||
if num_attn > 0:
|
||||
for j in range(config['num_res_blocks']):
|
||||
paths = renew_attention_paths(attns[j])
|
||||
assign_to_checkpoint(paths, new_checkpoint, checkpoint, config=config)
|
||||
|
||||
mid_block_1_layers = [key for key in checkpoint if "mid.block_1" in key]
|
||||
mid_block_2_layers = [key for key in checkpoint if "mid.block_2" in key]
|
||||
mid_attn_1_layers = [key for key in checkpoint if "mid.attn_1" in key]
|
||||
|
||||
# Mid new 2
|
||||
paths = renew_resnet_paths(mid_block_1_layers)
|
||||
assign_to_checkpoint(paths, new_checkpoint, checkpoint, additional_replacements=[
|
||||
{'old': 'mid.', 'new': 'mid_new_2.'}, {'old': 'block_1', 'new': 'resnets.0'}
|
||||
])
|
||||
|
||||
paths = renew_resnet_paths(mid_block_2_layers)
|
||||
assign_to_checkpoint(paths, new_checkpoint, checkpoint, additional_replacements=[
|
||||
{'old': 'mid.', 'new': 'mid_new_2.'}, {'old': 'block_2', 'new': 'resnets.1'}
|
||||
])
|
||||
|
||||
paths = renew_attention_paths(mid_attn_1_layers, in_mid=True)
|
||||
assign_to_checkpoint(paths, new_checkpoint, checkpoint, additional_replacements=[
|
||||
{'old': 'mid.', 'new': 'mid_new_2.'}, {'old': 'attn_1', 'new': 'attentions.0'}
|
||||
])
|
||||
|
||||
for i in range(num_up_blocks):
|
||||
block_id = num_up_blocks - 1 - i
|
||||
|
||||
if any('upsample' in layer for layer in up_blocks[i]):
|
||||
new_checkpoint[f'up_blocks.{block_id}.upsamplers.0.conv.weight'] = checkpoint[f'up.{i}.upsample.conv.weight']
|
||||
new_checkpoint[f'up_blocks.{block_id}.upsamplers.0.conv.bias'] = checkpoint[f'up.{i}.upsample.conv.bias']
|
||||
|
||||
if any('block' in layer for layer in up_blocks[i]):
|
||||
num_blocks = len({'.'.join(shave_segments(layer, 2).split('.')[:2]) for layer in up_blocks[i] if 'block' in layer})
|
||||
blocks = {layer_id: [key for key in up_blocks[i] if f'block.{layer_id}' in key] for layer_id in range(num_blocks)}
|
||||
|
||||
if num_blocks > 0:
|
||||
for j in range(config['num_res_blocks'] + 1):
|
||||
replace_indices = {'old': f'up_blocks.{i}', 'new': f'up_blocks.{block_id}'}
|
||||
paths = renew_resnet_paths(blocks[j])
|
||||
assign_to_checkpoint(paths, new_checkpoint, checkpoint, additional_replacements=[replace_indices])
|
||||
|
||||
if any('attn' in layer for layer in up_blocks[i]):
|
||||
num_attn = len({'.'.join(shave_segments(layer, 2).split('.')[:2]) for layer in up_blocks[i] if 'attn' in layer})
|
||||
attns = {layer_id: [key for key in up_blocks[i] if f'attn.{layer_id}' in key] for layer_id in range(num_blocks)}
|
||||
|
||||
if num_attn > 0:
|
||||
for j in range(config['num_res_blocks'] + 1):
|
||||
replace_indices = {'old': f'up_blocks.{i}', 'new': f'up_blocks.{block_id}'}
|
||||
paths = renew_attention_paths(attns[j])
|
||||
assign_to_checkpoint(paths, new_checkpoint, checkpoint, additional_replacements=[replace_indices])
|
||||
|
||||
new_checkpoint = {k.replace('mid_new_2', 'mid_block'): v for k, v in new_checkpoint.items()}
|
||||
return new_checkpoint
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
parser = argparse.ArgumentParser()
|
||||
|
||||
parser.add_argument(
|
||||
"--checkpoint_path", default=None, type=str, required=True, help="Path to the checkpoint to convert."
|
||||
)
|
||||
|
||||
parser.add_argument(
|
||||
"--config_file",
|
||||
default=None,
|
||||
type=str,
|
||||
required=True,
|
||||
help="The config json file corresponding to the architecture.",
|
||||
)
|
||||
|
||||
parser.add_argument(
|
||||
"--dump_path", default=None, type=str, required=True, help="Path to the output model."
|
||||
)
|
||||
|
||||
args = parser.parse_args()
|
||||
checkpoint = torch.load(args.checkpoint_path)
|
||||
|
||||
with open(args.config_file) as f:
|
||||
config = json.loads(f.read())
|
||||
|
||||
converted_checkpoint = convert_ddpm_checkpoint(checkpoint, config)
|
||||
|
||||
if "ddpm" in config:
|
||||
del config["ddpm"]
|
||||
|
||||
model = UNet2DModel(**config)
|
||||
model.load_state_dict(converted_checkpoint)
|
||||
|
||||
scheduler = DDPMScheduler.from_config("/".join(args.checkpoint_path.split("/")[:-1]))
|
||||
|
||||
pipe = DDPMPipeline(unet=model, scheduler=scheduler)
|
||||
pipe.save_pretrained(args.dump_path)
|
||||
@@ -1,332 +0,0 @@
|
||||
# coding=utf-8
|
||||
# Copyright 2022 The HuggingFace Inc. team.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
""" Conversion script for the LDM checkpoints. """
|
||||
|
||||
import argparse
|
||||
import json
|
||||
import torch
|
||||
from diffusers import VQModel, DDPMScheduler, UNet2DModel, LDMPipeline
|
||||
|
||||
|
||||
def shave_segments(path, n_shave_prefix_segments=1):
|
||||
"""
|
||||
Removes segments. Positive values shave the first segments, negative shave the last segments.
|
||||
"""
|
||||
if n_shave_prefix_segments >= 0:
|
||||
return '.'.join(path.split('.')[n_shave_prefix_segments:])
|
||||
else:
|
||||
return '.'.join(path.split('.')[:n_shave_prefix_segments])
|
||||
|
||||
|
||||
def renew_resnet_paths(old_list, n_shave_prefix_segments=0):
|
||||
"""
|
||||
Updates paths inside resnets to the new naming scheme (local renaming)
|
||||
"""
|
||||
mapping = []
|
||||
for old_item in old_list:
|
||||
new_item = old_item.replace('in_layers.0', 'norm1')
|
||||
new_item = new_item.replace('in_layers.2', 'conv1')
|
||||
|
||||
new_item = new_item.replace('out_layers.0', 'norm2')
|
||||
new_item = new_item.replace('out_layers.3', 'conv2')
|
||||
|
||||
new_item = new_item.replace('emb_layers.1', 'time_emb_proj')
|
||||
new_item = new_item.replace('skip_connection', 'conv_shortcut')
|
||||
|
||||
new_item = shave_segments(new_item, n_shave_prefix_segments=n_shave_prefix_segments)
|
||||
|
||||
mapping.append({'old': old_item, 'new': new_item})
|
||||
|
||||
return mapping
|
||||
|
||||
|
||||
def renew_attention_paths(old_list, n_shave_prefix_segments=0):
|
||||
"""
|
||||
Updates paths inside attentions to the new naming scheme (local renaming)
|
||||
"""
|
||||
mapping = []
|
||||
for old_item in old_list:
|
||||
new_item = old_item
|
||||
|
||||
new_item = new_item.replace('norm.weight', 'group_norm.weight')
|
||||
new_item = new_item.replace('norm.bias', 'group_norm.bias')
|
||||
|
||||
new_item = new_item.replace('proj_out.weight', 'proj_attn.weight')
|
||||
new_item = new_item.replace('proj_out.bias', 'proj_attn.bias')
|
||||
|
||||
new_item = shave_segments(new_item, n_shave_prefix_segments=n_shave_prefix_segments)
|
||||
|
||||
mapping.append({'old': old_item, 'new': new_item})
|
||||
|
||||
return mapping
|
||||
|
||||
|
||||
def assign_to_checkpoint(paths, checkpoint, old_checkpoint, attention_paths_to_split=None, additional_replacements=None, config=None):
|
||||
"""
|
||||
This does the final conversion step: take locally converted weights and apply a global renaming
|
||||
to them. It splits attention layers, and takes into account additional replacements
|
||||
that may arise.
|
||||
|
||||
Assigns the weights to the new checkpoint.
|
||||
"""
|
||||
assert isinstance(paths, list), "Paths should be a list of dicts containing 'old' and 'new' keys."
|
||||
|
||||
# Splits the attention layers into three variables.
|
||||
if attention_paths_to_split is not None:
|
||||
for path, path_map in attention_paths_to_split.items():
|
||||
old_tensor = old_checkpoint[path]
|
||||
channels = old_tensor.shape[0] // 3
|
||||
|
||||
target_shape = (-1, channels) if len(old_tensor.shape) == 3 else (-1)
|
||||
|
||||
num_heads = old_tensor.shape[0] // config["num_head_channels"] // 3
|
||||
|
||||
old_tensor = old_tensor.reshape((num_heads, 3 * channels // num_heads) + old_tensor.shape[1:])
|
||||
query, key, value = old_tensor.split(channels // num_heads, dim=1)
|
||||
|
||||
checkpoint[path_map['query']] = query.reshape(target_shape)
|
||||
checkpoint[path_map['key']] = key.reshape(target_shape)
|
||||
checkpoint[path_map['value']] = value.reshape(target_shape)
|
||||
|
||||
for path in paths:
|
||||
new_path = path['new']
|
||||
|
||||
# These have already been assigned
|
||||
if attention_paths_to_split is not None and new_path in attention_paths_to_split:
|
||||
continue
|
||||
|
||||
# Global renaming happens here
|
||||
new_path = new_path.replace('middle_block.0', 'mid.resnets.0')
|
||||
new_path = new_path.replace('middle_block.1', 'mid.attentions.0')
|
||||
new_path = new_path.replace('middle_block.2', 'mid.resnets.1')
|
||||
|
||||
if additional_replacements is not None:
|
||||
for replacement in additional_replacements:
|
||||
new_path = new_path.replace(replacement['old'], replacement['new'])
|
||||
|
||||
# proj_attn.weight has to be converted from conv 1D to linear
|
||||
if "proj_attn.weight" in new_path:
|
||||
checkpoint[new_path] = old_checkpoint[path['old']][:, :, 0]
|
||||
else:
|
||||
checkpoint[new_path] = old_checkpoint[path['old']]
|
||||
|
||||
|
||||
def convert_ldm_checkpoint(checkpoint, config):
|
||||
"""
|
||||
Takes a state dict and a config, and returns a converted checkpoint.
|
||||
"""
|
||||
new_checkpoint = {}
|
||||
|
||||
new_checkpoint['time_embedding.linear_1.weight'] = checkpoint['time_embed.0.weight']
|
||||
new_checkpoint['time_embedding.linear_1.bias'] = checkpoint['time_embed.0.bias']
|
||||
new_checkpoint['time_embedding.linear_2.weight'] = checkpoint['time_embed.2.weight']
|
||||
new_checkpoint['time_embedding.linear_2.bias'] = checkpoint['time_embed.2.bias']
|
||||
|
||||
new_checkpoint['conv_in.weight'] = checkpoint['input_blocks.0.0.weight']
|
||||
new_checkpoint['conv_in.bias'] = checkpoint['input_blocks.0.0.bias']
|
||||
|
||||
new_checkpoint['conv_norm_out.weight'] = checkpoint['out.0.weight']
|
||||
new_checkpoint['conv_norm_out.bias'] = checkpoint['out.0.bias']
|
||||
new_checkpoint['conv_out.weight'] = checkpoint['out.2.weight']
|
||||
new_checkpoint['conv_out.bias'] = checkpoint['out.2.bias']
|
||||
|
||||
# Retrieves the keys for the input blocks only
|
||||
num_input_blocks = len({'.'.join(layer.split('.')[:2]) for layer in checkpoint if 'input_blocks' in layer})
|
||||
input_blocks = {layer_id: [key for key in checkpoint if f'input_blocks.{layer_id}' in key] for layer_id in range(num_input_blocks)}
|
||||
|
||||
# Retrieves the keys for the middle blocks only
|
||||
num_middle_blocks = len({'.'.join(layer.split('.')[:2]) for layer in checkpoint if 'middle_block' in layer})
|
||||
middle_blocks = {layer_id: [key for key in checkpoint if f'middle_block.{layer_id}' in key] for layer_id in range(num_middle_blocks)}
|
||||
|
||||
# Retrieves the keys for the output blocks only
|
||||
num_output_blocks = len({'.'.join(layer.split('.')[:2]) for layer in checkpoint if 'output_blocks' in layer})
|
||||
output_blocks = {layer_id: [key for key in checkpoint if f'output_blocks.{layer_id}' in key] for layer_id in range(num_output_blocks)}
|
||||
|
||||
for i in range(1, num_input_blocks):
|
||||
block_id = (i - 1) // (config['num_res_blocks'] + 1)
|
||||
layer_in_block_id = (i - 1) % (config['num_res_blocks'] + 1)
|
||||
|
||||
resnets = [key for key in input_blocks[i] if f'input_blocks.{i}.0' in key]
|
||||
attentions = [key for key in input_blocks[i] if f'input_blocks.{i}.1' in key]
|
||||
|
||||
if f'input_blocks.{i}.0.op.weight' in checkpoint:
|
||||
new_checkpoint[f'downsample_blocks.{block_id}.downsamplers.0.conv.weight'] = checkpoint[f'input_blocks.{i}.0.op.weight']
|
||||
new_checkpoint[f'downsample_blocks.{block_id}.downsamplers.0.conv.bias'] = checkpoint[f'input_blocks.{i}.0.op.bias']
|
||||
|
||||
paths = renew_resnet_paths(resnets)
|
||||
meta_path = {'old': f'input_blocks.{i}.0', 'new': f'downsample_blocks.{block_id}.resnets.{layer_in_block_id}'}
|
||||
resnet_op = {'old': 'resnets.2.op', 'new': 'downsamplers.0.op'}
|
||||
assign_to_checkpoint(paths, new_checkpoint, checkpoint, additional_replacements=[meta_path, resnet_op], config=config)
|
||||
|
||||
if len(attentions):
|
||||
paths = renew_attention_paths(attentions)
|
||||
meta_path = {'old': f'input_blocks.{i}.1', 'new': f'downsample_blocks.{block_id}.attentions.{layer_in_block_id}'}
|
||||
to_split = {
|
||||
f'input_blocks.{i}.1.qkv.bias': {
|
||||
'key': f'downsample_blocks.{block_id}.attentions.{layer_in_block_id}.key.bias',
|
||||
'query': f'downsample_blocks.{block_id}.attentions.{layer_in_block_id}.query.bias',
|
||||
'value': f'downsample_blocks.{block_id}.attentions.{layer_in_block_id}.value.bias',
|
||||
},
|
||||
f'input_blocks.{i}.1.qkv.weight': {
|
||||
'key': f'downsample_blocks.{block_id}.attentions.{layer_in_block_id}.key.weight',
|
||||
'query': f'downsample_blocks.{block_id}.attentions.{layer_in_block_id}.query.weight',
|
||||
'value': f'downsample_blocks.{block_id}.attentions.{layer_in_block_id}.value.weight',
|
||||
},
|
||||
}
|
||||
assign_to_checkpoint(
|
||||
paths,
|
||||
new_checkpoint,
|
||||
checkpoint,
|
||||
additional_replacements=[meta_path],
|
||||
attention_paths_to_split=to_split,
|
||||
config=config
|
||||
)
|
||||
|
||||
resnet_0 = middle_blocks[0]
|
||||
attentions = middle_blocks[1]
|
||||
resnet_1 = middle_blocks[2]
|
||||
|
||||
resnet_0_paths = renew_resnet_paths(resnet_0)
|
||||
assign_to_checkpoint(resnet_0_paths, new_checkpoint, checkpoint, config=config)
|
||||
|
||||
resnet_1_paths = renew_resnet_paths(resnet_1)
|
||||
assign_to_checkpoint(resnet_1_paths, new_checkpoint, checkpoint, config=config)
|
||||
|
||||
attentions_paths = renew_attention_paths(attentions)
|
||||
to_split = {
|
||||
'middle_block.1.qkv.bias': {
|
||||
'key': 'mid_block.attentions.0.key.bias',
|
||||
'query': 'mid_block.attentions.0.query.bias',
|
||||
'value': 'mid_block.attentions.0.value.bias',
|
||||
},
|
||||
'middle_block.1.qkv.weight': {
|
||||
'key': 'mid_block.attentions.0.key.weight',
|
||||
'query': 'mid_block.attentions.0.query.weight',
|
||||
'value': 'mid_block.attentions.0.value.weight',
|
||||
},
|
||||
}
|
||||
assign_to_checkpoint(attentions_paths, new_checkpoint, checkpoint, attention_paths_to_split=to_split, config=config)
|
||||
|
||||
for i in range(num_output_blocks):
|
||||
block_id = i // (config['num_res_blocks'] + 1)
|
||||
layer_in_block_id = i % (config['num_res_blocks'] + 1)
|
||||
output_block_layers = [shave_segments(name, 2) for name in output_blocks[i]]
|
||||
output_block_list = {}
|
||||
|
||||
for layer in output_block_layers:
|
||||
layer_id, layer_name = layer.split('.')[0], shave_segments(layer, 1)
|
||||
if layer_id in output_block_list:
|
||||
output_block_list[layer_id].append(layer_name)
|
||||
else:
|
||||
output_block_list[layer_id] = [layer_name]
|
||||
|
||||
if len(output_block_list) > 1:
|
||||
resnets = [key for key in output_blocks[i] if f'output_blocks.{i}.0' in key]
|
||||
attentions = [key for key in output_blocks[i] if f'output_blocks.{i}.1' in key]
|
||||
|
||||
resnet_0_paths = renew_resnet_paths(resnets)
|
||||
paths = renew_resnet_paths(resnets)
|
||||
|
||||
meta_path = {'old': f'output_blocks.{i}.0', 'new': f'up_blocks.{block_id}.resnets.{layer_in_block_id}'}
|
||||
assign_to_checkpoint(paths, new_checkpoint, checkpoint, additional_replacements=[meta_path], config=config)
|
||||
|
||||
if ['conv.weight', 'conv.bias'] in output_block_list.values():
|
||||
index = list(output_block_list.values()).index(['conv.weight', 'conv.bias'])
|
||||
new_checkpoint[f'up_blocks.{block_id}.upsamplers.0.conv.weight'] = checkpoint[f'output_blocks.{i}.{index}.conv.weight']
|
||||
new_checkpoint[f'up_blocks.{block_id}.upsamplers.0.conv.bias'] = checkpoint[f'output_blocks.{i}.{index}.conv.bias']
|
||||
|
||||
# Clear attentions as they have been attributed above.
|
||||
if len(attentions) == 2:
|
||||
attentions = []
|
||||
|
||||
if len(attentions):
|
||||
paths = renew_attention_paths(attentions)
|
||||
meta_path = {
|
||||
'old': f'output_blocks.{i}.1',
|
||||
'new': f'up_blocks.{block_id}.attentions.{layer_in_block_id}'
|
||||
}
|
||||
to_split = {
|
||||
f'output_blocks.{i}.1.qkv.bias': {
|
||||
'key': f'up_blocks.{block_id}.attentions.{layer_in_block_id}.key.bias',
|
||||
'query': f'up_blocks.{block_id}.attentions.{layer_in_block_id}.query.bias',
|
||||
'value': f'up_blocks.{block_id}.attentions.{layer_in_block_id}.value.bias',
|
||||
},
|
||||
f'output_blocks.{i}.1.qkv.weight': {
|
||||
'key': f'up_blocks.{block_id}.attentions.{layer_in_block_id}.key.weight',
|
||||
'query': f'up_blocks.{block_id}.attentions.{layer_in_block_id}.query.weight',
|
||||
'value': f'up_blocks.{block_id}.attentions.{layer_in_block_id}.value.weight',
|
||||
},
|
||||
}
|
||||
assign_to_checkpoint(
|
||||
paths,
|
||||
new_checkpoint,
|
||||
checkpoint,
|
||||
additional_replacements=[meta_path],
|
||||
attention_paths_to_split=to_split if any('qkv' in key for key in attentions) else None,
|
||||
config=config,
|
||||
)
|
||||
else:
|
||||
resnet_0_paths = renew_resnet_paths(output_block_layers, n_shave_prefix_segments=1)
|
||||
for path in resnet_0_paths:
|
||||
old_path = '.'.join(['output_blocks', str(i), path['old']])
|
||||
new_path = '.'.join(['up_blocks', str(block_id), 'resnets', str(layer_in_block_id), path['new']])
|
||||
|
||||
new_checkpoint[new_path] = checkpoint[old_path]
|
||||
|
||||
return new_checkpoint
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
parser = argparse.ArgumentParser()
|
||||
|
||||
parser.add_argument(
|
||||
"--checkpoint_path", default=None, type=str, required=True, help="Path to the checkpoint to convert."
|
||||
)
|
||||
|
||||
parser.add_argument(
|
||||
"--config_file",
|
||||
default=None,
|
||||
type=str,
|
||||
required=True,
|
||||
help="The config json file corresponding to the architecture.",
|
||||
)
|
||||
|
||||
parser.add_argument(
|
||||
"--dump_path", default=None, type=str, required=True, help="Path to the output model."
|
||||
)
|
||||
|
||||
args = parser.parse_args()
|
||||
|
||||
checkpoint = torch.load(args.checkpoint_path)
|
||||
|
||||
with open(args.config_file) as f:
|
||||
config = json.loads(f.read())
|
||||
|
||||
converted_checkpoint = convert_ldm_checkpoint(checkpoint, config)
|
||||
|
||||
if "ldm" in config:
|
||||
del config["ldm"]
|
||||
|
||||
model = UNet2DModel(**config)
|
||||
model.load_state_dict(converted_checkpoint)
|
||||
|
||||
try:
|
||||
scheduler = DDPMScheduler.from_config("/".join(args.checkpoint_path.split("/")[:-1]))
|
||||
vqvae = VQModel.from_pretrained("/".join(args.checkpoint_path.split("/")[:-1]))
|
||||
|
||||
pipe = LDMPipeline(unet=model, scheduler=scheduler, vae=vqvae)
|
||||
pipe.save_pretrained(args.dump_path)
|
||||
except:
|
||||
model.save_pretrained(args.dump_path)
|
||||
@@ -1,183 +0,0 @@
|
||||
# coding=utf-8
|
||||
# Copyright 2022 The HuggingFace Inc. team.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
""" Conversion script for the NCSNPP checkpoints. """
|
||||
|
||||
import argparse
|
||||
import json
|
||||
import torch
|
||||
from diffusers import UNet2DModel
|
||||
|
||||
|
||||
def convert_ncsnpp_checkpoint(checkpoint, config):
|
||||
"""
|
||||
Takes a state dict and the path to
|
||||
"""
|
||||
new_model_architecture = UNet2DModel(**config)
|
||||
new_model_architecture.time_proj.W.data = checkpoint["all_modules.0.W"].data
|
||||
new_model_architecture.time_proj.weight.data = checkpoint["all_modules.0.W"].data
|
||||
new_model_architecture.time_embedding.linear_1.weight.data = checkpoint["all_modules.1.weight"].data
|
||||
new_model_architecture.time_embedding.linear_1.bias.data = checkpoint["all_modules.1.bias"].data
|
||||
|
||||
new_model_architecture.time_embedding.linear_2.weight.data = checkpoint["all_modules.2.weight"].data
|
||||
new_model_architecture.time_embedding.linear_2.bias.data = checkpoint["all_modules.2.bias"].data
|
||||
|
||||
new_model_architecture.conv_in.weight.data = checkpoint["all_modules.3.weight"].data
|
||||
new_model_architecture.conv_in.bias.data = checkpoint["all_modules.3.bias"].data
|
||||
|
||||
new_model_architecture.conv_norm_out.weight.data = checkpoint[list(checkpoint.keys())[-4]].data
|
||||
new_model_architecture.conv_norm_out.bias.data = checkpoint[list(checkpoint.keys())[-3]].data
|
||||
new_model_architecture.conv_out.weight.data = checkpoint[list(checkpoint.keys())[-2]].data
|
||||
new_model_architecture.conv_out.bias.data = checkpoint[list(checkpoint.keys())[-1]].data
|
||||
|
||||
module_index = 4
|
||||
|
||||
def set_attention_weights(new_layer, old_checkpoint, index):
|
||||
new_layer.query.weight.data = old_checkpoint[f"all_modules.{index}.NIN_0.W"].data.T
|
||||
new_layer.key.weight.data = old_checkpoint[f"all_modules.{index}.NIN_1.W"].data.T
|
||||
new_layer.value.weight.data = old_checkpoint[f"all_modules.{index}.NIN_2.W"].data.T
|
||||
|
||||
new_layer.query.bias.data = old_checkpoint[f"all_modules.{index}.NIN_0.b"].data
|
||||
new_layer.key.bias.data = old_checkpoint[f"all_modules.{index}.NIN_1.b"].data
|
||||
new_layer.value.bias.data = old_checkpoint[f"all_modules.{index}.NIN_2.b"].data
|
||||
|
||||
new_layer.proj_attn.weight.data = old_checkpoint[f"all_modules.{index}.NIN_3.W"].data.T
|
||||
new_layer.proj_attn.bias.data = old_checkpoint[f"all_modules.{index}.NIN_3.b"].data
|
||||
|
||||
new_layer.group_norm.weight.data = old_checkpoint[f"all_modules.{index}.GroupNorm_0.weight"].data
|
||||
new_layer.group_norm.bias.data = old_checkpoint[f"all_modules.{index}.GroupNorm_0.bias"].data
|
||||
|
||||
def set_resnet_weights(new_layer, old_checkpoint, index):
|
||||
new_layer.conv1.weight.data = old_checkpoint[f"all_modules.{index}.Conv_0.weight"].data
|
||||
new_layer.conv1.bias.data = old_checkpoint[f"all_modules.{index}.Conv_0.bias"].data
|
||||
new_layer.norm1.weight.data = old_checkpoint[f"all_modules.{index}.GroupNorm_0.weight"].data
|
||||
new_layer.norm1.bias.data = old_checkpoint[f"all_modules.{index}.GroupNorm_0.bias"].data
|
||||
|
||||
new_layer.conv2.weight.data = old_checkpoint[f"all_modules.{index}.Conv_1.weight"].data
|
||||
new_layer.conv2.bias.data = old_checkpoint[f"all_modules.{index}.Conv_1.bias"].data
|
||||
new_layer.norm2.weight.data = old_checkpoint[f"all_modules.{index}.GroupNorm_1.weight"].data
|
||||
new_layer.norm2.bias.data = old_checkpoint[f"all_modules.{index}.GroupNorm_1.bias"].data
|
||||
|
||||
new_layer.time_emb_proj.weight.data = old_checkpoint[f"all_modules.{index}.Dense_0.weight"].data
|
||||
new_layer.time_emb_proj.bias.data = old_checkpoint[f"all_modules.{index}.Dense_0.bias"].data
|
||||
|
||||
if new_layer.in_channels != new_layer.out_channels or new_layer.up or new_layer.down:
|
||||
new_layer.conv_shortcut.weight.data = old_checkpoint[f"all_modules.{index}.Conv_2.weight"].data
|
||||
new_layer.conv_shortcut.bias.data = old_checkpoint[f"all_modules.{index}.Conv_2.bias"].data
|
||||
|
||||
for i, block in enumerate(new_model_architecture.downsample_blocks):
|
||||
has_attentions = hasattr(block, "attentions")
|
||||
for j in range(len(block.resnets)):
|
||||
set_resnet_weights(block.resnets[j], checkpoint, module_index)
|
||||
module_index += 1
|
||||
if has_attentions:
|
||||
set_attention_weights(block.attentions[j], checkpoint, module_index)
|
||||
module_index += 1
|
||||
|
||||
if hasattr(block, "downsamplers") and block.downsamplers is not None:
|
||||
set_resnet_weights(block.resnet_down, checkpoint, module_index)
|
||||
module_index += 1
|
||||
block.skip_conv.weight.data = checkpoint[f"all_modules.{module_index}.Conv_0.weight"].data
|
||||
block.skip_conv.bias.data = checkpoint[f"all_modules.{module_index}.Conv_0.bias"].data
|
||||
module_index += 1
|
||||
|
||||
set_resnet_weights(new_model_architecture.mid_block.resnets[0], checkpoint, module_index)
|
||||
module_index += 1
|
||||
set_attention_weights(new_model_architecture.mid_block.attentions[0], checkpoint, module_index)
|
||||
module_index += 1
|
||||
set_resnet_weights(new_model_architecture.mid_block.resnets[1], checkpoint, module_index)
|
||||
module_index += 1
|
||||
|
||||
for i, block in enumerate(new_model_architecture.up_blocks):
|
||||
has_attentions = hasattr(block, "attentions")
|
||||
for j in range(len(block.resnets)):
|
||||
set_resnet_weights(block.resnets[j], checkpoint, module_index)
|
||||
module_index += 1
|
||||
if has_attentions:
|
||||
set_attention_weights(
|
||||
block.attentions[0], checkpoint, module_index
|
||||
) # why can there only be a single attention layer for up?
|
||||
module_index += 1
|
||||
|
||||
if hasattr(block, "resnet_up") and block.resnet_up is not None:
|
||||
block.skip_norm.weight.data = checkpoint[f"all_modules.{module_index}.weight"].data
|
||||
block.skip_norm.bias.data = checkpoint[f"all_modules.{module_index}.bias"].data
|
||||
module_index += 1
|
||||
block.skip_conv.weight.data = checkpoint[f"all_modules.{module_index}.weight"].data
|
||||
block.skip_conv.bias.data = checkpoint[f"all_modules.{module_index}.bias"].data
|
||||
module_index += 1
|
||||
set_resnet_weights(block.resnet_up, checkpoint, module_index)
|
||||
module_index += 1
|
||||
|
||||
new_model_architecture.conv_norm_out.weight.data = checkpoint[f"all_modules.{module_index}.weight"].data
|
||||
new_model_architecture.conv_norm_out.bias.data = checkpoint[f"all_modules.{module_index}.bias"].data
|
||||
module_index += 1
|
||||
new_model_architecture.conv_out.weight.data = checkpoint[f"all_modules.{module_index}.weight"].data
|
||||
new_model_architecture.conv_out.bias.data = checkpoint[f"all_modules.{module_index}.bias"].data
|
||||
|
||||
return new_model_architecture.state_dict()
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
parser = argparse.ArgumentParser()
|
||||
|
||||
parser.add_argument(
|
||||
"--checkpoint_path",
|
||||
default="/Users/arthurzucker/Work/diffusers/ArthurZ/diffusion_pytorch_model.bin",
|
||||
type=str,
|
||||
required=False,
|
||||
help="Path to the checkpoint to convert.",
|
||||
)
|
||||
|
||||
parser.add_argument(
|
||||
"--config_file",
|
||||
default="/Users/arthurzucker/Work/diffusers/ArthurZ/config.json",
|
||||
type=str,
|
||||
required=False,
|
||||
help="The config json file corresponding to the architecture.",
|
||||
)
|
||||
|
||||
parser.add_argument(
|
||||
"--dump_path",
|
||||
default="/Users/arthurzucker/Work/diffusers/ArthurZ/diffusion_model_new.pt",
|
||||
type=str,
|
||||
required=False,
|
||||
help="Path to the output model.",
|
||||
)
|
||||
|
||||
args = parser.parse_args()
|
||||
|
||||
checkpoint = torch.load(args.checkpoint_path, map_location="cpu")
|
||||
|
||||
with open(args.config_file) as f:
|
||||
config = json.loads(f.read())
|
||||
|
||||
converted_checkpoint = convert_ncsnpp_checkpoint(
|
||||
checkpoint,
|
||||
config,
|
||||
)
|
||||
|
||||
if "sde" in config:
|
||||
del config["sde"]
|
||||
|
||||
model = UNet2DModel(**config)
|
||||
model.load_state_dict(converted_checkpoint)
|
||||
|
||||
try:
|
||||
scheduler = ScoreSdeVeScheduler.from_config("/".join(args.checkpoint_path.split("/")[:-1]))
|
||||
|
||||
pipe = ScoreSdeVePipeline(unet=model, scheduler=scheduler)
|
||||
pipe.save_pretrained(args.dump_path)
|
||||
except:
|
||||
model.save_pretrained(args.dump_path)
|
||||
@@ -1,91 +0,0 @@
|
||||
from huggingface_hub import HfApi
|
||||
from transformers.file_utils import has_file
|
||||
from diffusers import UNet2DModel
|
||||
import random
|
||||
import torch
|
||||
api = HfApi()
|
||||
|
||||
results = {}
|
||||
results["google_ddpm_cifar10_32"] = torch.tensor([-0.7515, -1.6883, 0.2420, 0.0300, 0.6347, 1.3433, -1.1743, -3.7467,
|
||||
1.2342, -2.2485, 0.4636, 0.8076, -0.7991, 0.3969, 0.8498, 0.9189,
|
||||
-1.8887, -3.3522, 0.7639, 0.2040, 0.6271, -2.7148, -1.6316, 3.0839,
|
||||
0.3186, 0.2721, -0.9759, -1.2461, 2.6257, 1.3557])
|
||||
results["google_ddpm_ema_bedroom_256"] = torch.tensor([-2.3639, -2.5344, 0.0054, -0.6674, 1.5990, 1.0158, 0.3124, -2.1436,
|
||||
1.8795, -2.5429, -0.1566, -0.3973, 1.2490, 2.6447, 1.2283, -0.5208,
|
||||
-2.8154, -3.5119, 2.3838, 1.2033, 1.7201, -2.1256, -1.4576, 2.7948,
|
||||
2.4204, -0.9752, -1.2546, 0.8027, 3.2758, 3.1365])
|
||||
results["CompVis_ldm_celebahq_256"] = torch.tensor([-0.6531, -0.6891, -0.3172, -0.5375, -0.9140, -0.5367, -0.1175, -0.7869,
|
||||
-0.3808, -0.4513, -0.2098, -0.0083, 0.3183, 0.5140, 0.2247, -0.1304,
|
||||
-0.1302, -0.2802, -0.2084, -0.2025, -0.4967, -0.4873, -0.0861, 0.6925,
|
||||
0.0250, 0.1290, -0.1543, 0.6316, 1.0460, 1.4943])
|
||||
results["google_ncsnpp_ffhq_1024"] = torch.tensor([ 0.0911, 0.1107, 0.0182, 0.0435, -0.0805, -0.0608, 0.0381, 0.2172,
|
||||
-0.0280, 0.1327, -0.0299, -0.0255, -0.0050, -0.1170, -0.1046, 0.0309,
|
||||
0.1367, 0.1728, -0.0533, -0.0748, -0.0534, 0.1624, 0.0384, -0.1805,
|
||||
-0.0707, 0.0642, 0.0220, -0.0134, -0.1333, -0.1505])
|
||||
results["google_ncsnpp_bedroom_256"] = torch.tensor([ 0.1321, 0.1337, 0.0440, 0.0622, -0.0591, -0.0370, 0.0503, 0.2133,
|
||||
-0.0177, 0.1415, -0.0116, -0.0112, 0.0044, -0.0980, -0.0789, 0.0395,
|
||||
0.1502, 0.1785, -0.0488, -0.0514, -0.0404, 0.1539, 0.0454, -0.1559,
|
||||
-0.0665, 0.0659, 0.0383, -0.0005, -0.1266, -0.1386])
|
||||
results["google_ncsnpp_celebahq_256"] = torch.tensor([ 0.1154, 0.1218, 0.0307, 0.0526, -0.0711, -0.0541, 0.0366, 0.2078,
|
||||
-0.0267, 0.1317, -0.0226, -0.0193, -0.0014, -0.1055, -0.0902, 0.0330,
|
||||
0.1391, 0.1709, -0.0562, -0.0693, -0.0560, 0.1482, 0.0381, -0.1683,
|
||||
-0.0681, 0.0661, 0.0331, -0.0046, -0.1268, -0.1431])
|
||||
results["google_ncsnpp_church_256"] = torch.tensor([ 0.1192, 0.1240, 0.0414, 0.0606, -0.0557, -0.0412, 0.0430, 0.2042,
|
||||
-0.0200, 0.1385, -0.0115, -0.0132, 0.0017, -0.0965, -0.0802, 0.0398,
|
||||
0.1433, 0.1747, -0.0458, -0.0533, -0.0407, 0.1545, 0.0419, -0.1574,
|
||||
-0.0645, 0.0626, 0.0341, -0.0010, -0.1199, -0.1390])
|
||||
results["google_ncsnpp_ffhq_256"] = torch.tensor([ 0.1075, 0.1074, 0.0205, 0.0431, -0.0774, -0.0607, 0.0298, 0.2042,
|
||||
-0.0320, 0.1267, -0.0281, -0.0250, -0.0064, -0.1091, -0.0946, 0.0290,
|
||||
0.1328, 0.1650, -0.0580, -0.0738, -0.0586, 0.1440, 0.0337, -0.1746,
|
||||
-0.0712, 0.0605, 0.0250, -0.0099, -0.1316, -0.1473])
|
||||
results["google_ddpm_cat_256"] = torch.tensor([-1.4572, -2.0481, -0.0414, -0.6005, 1.4136, 0.5848, 0.4028, -2.7330,
|
||||
1.2212, -2.1228, 0.2155, 0.4039, 0.7662, 2.0535, 0.7477, -0.3243,
|
||||
-2.1758, -2.7648, 1.6947, 0.7026, 1.2338, -1.6078, -0.8682, 2.2810,
|
||||
1.8574, -0.5718, -0.5586, -0.0186, 2.3415, 2.1251])
|
||||
results["google_ddpm_celebahq_256"] = torch.tensor([-1.3690, -1.9720, -0.4090, -0.6966, 1.4660, 0.9938, -0.1385, -2.7324,
|
||||
0.7736, -1.8917, 0.2923, 0.4293, 0.1693, 1.4112, 1.1887, -0.3181,
|
||||
-2.2160, -2.6381, 1.3170, 0.8163, 0.9240, -1.6544, -0.6099, 2.5259,
|
||||
1.6430, -0.9090, -0.9392, -0.0126, 2.4268, 2.3266])
|
||||
results["google_ddpm_ema_celebahq_256"] = torch.tensor([-1.3525, -1.9628, -0.3956, -0.6860, 1.4664, 1.0014, -0.1259, -2.7212,
|
||||
0.7772, -1.8811, 0.2996, 0.4388, 0.1704, 1.4029, 1.1701, -0.3027,
|
||||
-2.2053, -2.6287, 1.3350, 0.8131, 0.9274, -1.6292, -0.6098, 2.5131,
|
||||
1.6505, -0.8958, -0.9298, -0.0151, 2.4257, 2.3355])
|
||||
results["google_ddpm_church_256"] = torch.tensor([-2.0585, -2.7897, -0.2850, -0.8940, 1.9052, 0.5702, 0.6345, -3.8959,
|
||||
1.5932, -3.2319, 0.1974, 0.0287, 1.7566, 2.6543, 0.8387, -0.5351,
|
||||
-3.2736, -4.3375, 2.9029, 1.6390, 1.4640, -2.1701, -1.9013, 2.9341,
|
||||
3.4981, -0.6255, -1.1644, -0.1591, 3.7097, 3.2066])
|
||||
results["google_ddpm_bedroom_256"] = torch.tensor([-2.3139, -2.5594, -0.0197, -0.6785, 1.7001, 1.1606, 0.3075, -2.1740,
|
||||
1.8071, -2.5630, -0.0926, -0.3811, 1.2116, 2.6246, 1.2731, -0.5398,
|
||||
-2.8153, -3.6140, 2.3893, 1.3262, 1.6258, -2.1856, -1.3267, 2.8395,
|
||||
2.3779, -1.0623, -1.2468, 0.8959, 3.3367, 3.2243])
|
||||
results["google_ddpm_ema_church_256"] = torch.tensor([-2.0628, -2.7667, -0.2089, -0.8263, 2.0539, 0.5992, 0.6495, -3.8336,
|
||||
1.6025, -3.2817, 0.1721, -0.0633, 1.7516, 2.7039, 0.8100, -0.5908,
|
||||
-3.2113, -4.4343, 2.9257, 1.3632, 1.5562, -2.1489, -1.9894, 3.0560,
|
||||
3.3396, -0.7328, -1.0417, 0.0383, 3.7093, 3.2343])
|
||||
results["google_ddpm_ema_cat_256"] = torch.tensor([-1.4574, -2.0569, -0.0473, -0.6117, 1.4018, 0.5769, 0.4129, -2.7344,
|
||||
1.2241, -2.1397, 0.2000, 0.3937, 0.7616, 2.0453, 0.7324, -0.3391,
|
||||
-2.1746, -2.7744, 1.6963, 0.6921, 1.2187, -1.6172, -0.8877, 2.2439,
|
||||
1.8471, -0.5839, -0.5605, -0.0464, 2.3250, 2.1219])
|
||||
|
||||
models = api.list_models(filter="diffusers")
|
||||
for mod in models:
|
||||
if "google" in mod.author or mod.modelId == "CompVis/ldm-celebahq-256":
|
||||
local_checkpoint = "/home/patrick/google_checkpoints/" + mod.modelId.split("/")[-1]
|
||||
|
||||
print(f"Started running {mod.modelId}!!!")
|
||||
|
||||
if mod.modelId.startswith("CompVis"):
|
||||
model = UNet2DModel.from_pretrained(local_checkpoint, subfolder = "unet")
|
||||
else:
|
||||
model = UNet2DModel.from_pretrained(local_checkpoint)
|
||||
|
||||
torch.manual_seed(0)
|
||||
random.seed(0)
|
||||
|
||||
noise = torch.randn(1, model.config.in_channels, model.config.sample_size, model.config.sample_size)
|
||||
time_step = torch.tensor([10] * noise.shape[0])
|
||||
with torch.no_grad():
|
||||
logits = model(noise, time_step)['sample']
|
||||
|
||||
assert torch.allclose(logits[0, 0, 0, :30], results["_".join("_".join(mod.modelId.split("/")).split("-"))], atol=1e-3)
|
||||
print(f"{mod.modelId} has passed succesfully!!!")
|
||||
57
setup.py
57
setup.py
@@ -1,4 +1,4 @@
|
||||
# Copyright 2022 The HuggingFace Team. All rights reserved.
|
||||
# Copyright 2021 The HuggingFace Team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
@@ -52,11 +52,11 @@ To create the package for pypi.
|
||||
twine upload dist/* -r pypitest --repository-url=https://test.pypi.org/legacy/
|
||||
|
||||
Check that you can install it in a virtualenv by running:
|
||||
pip install -i https://testpypi.python.org/pypi diffusers
|
||||
pip install -i https://testpypi.python.org/pypi transformers
|
||||
|
||||
Check you can run the following commands:
|
||||
python -c "from diffusers import pipeline; classifier = pipeline('text-classification'); print(classifier('What a nice release'))"
|
||||
python -c "from diffusers import *"
|
||||
python -c "from transformers import pipeline; classifier = pipeline('text-classification'); print(classifier('What a nice release'))"
|
||||
python -c "from transformers import *"
|
||||
|
||||
9. Upload the final version to actual pypi:
|
||||
twine upload dist/* -r pypi
|
||||
@@ -77,24 +77,36 @@ from setuptools import find_packages, setup
|
||||
# 2. once modified, run: `make deps_table_update` to update src/diffusers/dependency_versions_table.py
|
||||
_deps = [
|
||||
"Pillow",
|
||||
"accelerate>=0.9.0",
|
||||
"black~=22.0,>=22.3",
|
||||
"filelock",
|
||||
"flake8>=3.8.3",
|
||||
"huggingface-hub",
|
||||
"codecarbon==1.2.0",
|
||||
"dataclasses",
|
||||
"datasets",
|
||||
"GitPython<3.1.19",
|
||||
"hf-doc-builder>=0.3.0",
|
||||
"huggingface-hub>=0.1.0,<1.0",
|
||||
"importlib_metadata",
|
||||
"isort>=5.5.4",
|
||||
"numpy",
|
||||
"numpy>=1.17",
|
||||
"pytest",
|
||||
"pytest-timeout",
|
||||
"pytest-xdist",
|
||||
"python>=3.7.0",
|
||||
"regex!=2019.12.17",
|
||||
"requests",
|
||||
"sagemaker>=2.31.0",
|
||||
"tokenizers>=0.11.1,!=0.11.3,<0.13",
|
||||
"torch>=1.4",
|
||||
"tensorboard",
|
||||
"modelcards==0.1.4"
|
||||
"torchaudio",
|
||||
"tqdm>=4.27",
|
||||
"unidic>=1.0.2",
|
||||
"unidic_lite>=1.0.7",
|
||||
"uvicorn",
|
||||
]
|
||||
|
||||
# this is a lookup table with items like:
|
||||
#
|
||||
# tokenizers: "huggingface-hub==0.8.0"
|
||||
# tokenizers: "tokenizers==0.9.4"
|
||||
# packaging: "packaging"
|
||||
#
|
||||
# some of the values are versioned whereas others aren't.
|
||||
@@ -162,26 +174,22 @@ extras = {}
|
||||
extras = {}
|
||||
extras["quality"] = ["black ~= 22.0", "isort >= 5.5.4", "flake8 >= 3.8.3"]
|
||||
extras["docs"] = []
|
||||
extras["training"] = ["tensorboard", "modelcards"]
|
||||
extras["test"] = [
|
||||
"pytest",
|
||||
"pytest-xdist",
|
||||
"pytest-subtests",
|
||||
"datasets",
|
||||
"transformers",
|
||||
]
|
||||
extras["dev"] = extras["quality"] + extras["test"] + extras["training"]
|
||||
extras["dev"] = extras["quality"] + extras["test"]
|
||||
|
||||
install_requires = [
|
||||
deps["importlib_metadata"] + ";python_version<'3.8'", # importlib_metadata for Python versions that don't have it
|
||||
deps["filelock"],
|
||||
deps["huggingface-hub"],
|
||||
deps["numpy"],
|
||||
deps["regex"],
|
||||
deps["requests"],
|
||||
deps["torch"],
|
||||
deps["Pillow"],
|
||||
extras["sagemaker"] = [
|
||||
"sagemaker", # boto3 is a required package in sagemaker
|
||||
]
|
||||
|
||||
setup(
|
||||
name="diffusers",
|
||||
version="0.1.1",
|
||||
version="0.0.2",
|
||||
description="Diffusers",
|
||||
long_description=open("README.md", "r", encoding="utf-8").read(),
|
||||
long_description_content_type="text/markdown",
|
||||
@@ -192,9 +200,8 @@ setup(
|
||||
url="https://github.com/huggingface/diffusers",
|
||||
package_dir={"": "src"},
|
||||
packages=find_packages("src"),
|
||||
include_package_data=True,
|
||||
python_requires=">=3.6.0",
|
||||
install_requires=install_requires,
|
||||
install_requires=["numpy>=1.17", "packaging>=20.0", "pyyaml", "torch>=1.4.0"],
|
||||
extras_require=extras,
|
||||
classifiers=[
|
||||
"Development Status :: 5 - Production/Stable",
|
||||
|
||||
@@ -1,19 +1,11 @@
|
||||
# flake8: noqa
|
||||
# There's no way to ignore "F401 '...' imported but unused" warnings in this
|
||||
# module, but to preserve other warnings. So, don't check this module at all.
|
||||
from .utils import is_inflect_available, is_transformers_available, is_unidecode_available
|
||||
|
||||
|
||||
__version__ = "0.1.1"
|
||||
__version__ = "0.0.1"
|
||||
|
||||
from .modeling_utils import ModelMixin
|
||||
from .models import AutoencoderKL, UNet2DConditionModel, UNet2DModel, VQModel
|
||||
from .models.unet import UNetModel
|
||||
from .models.unet_glide import UNetGLIDEModel
|
||||
from .pipeline_utils import DiffusionPipeline
|
||||
from .pipelines import DDIMPipeline, DDPMPipeline, LDMPipeline, PNDMPipeline, ScoreSdeVePipeline
|
||||
from .schedulers import DDIMScheduler, DDPMScheduler, PNDMScheduler, SchedulerMixin, ScoreSdeVeScheduler
|
||||
|
||||
|
||||
if is_transformers_available():
|
||||
from .pipelines import LDMTextToImagePipeline
|
||||
else:
|
||||
from .utils.dummy_transformers_objects import *
|
||||
from .schedulers.gaussian_ddpm import GaussianDDPMScheduler
|
||||
|
||||
@@ -14,27 +14,30 @@
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
""" ConfigMixinuration base class and utilities."""
|
||||
import functools
|
||||
|
||||
|
||||
import copy
|
||||
import inspect
|
||||
import json
|
||||
import os
|
||||
import re
|
||||
from collections import OrderedDict
|
||||
from typing import Any, Dict, Tuple, Union
|
||||
|
||||
from huggingface_hub import hf_hub_download
|
||||
from requests import HTTPError
|
||||
|
||||
from . import __version__
|
||||
from .utils import (
|
||||
DIFFUSERS_CACHE,
|
||||
from transformers.utils import (
|
||||
HUGGINGFACE_CO_RESOLVE_ENDPOINT,
|
||||
EntryNotFoundError,
|
||||
RepositoryNotFoundError,
|
||||
RevisionNotFoundError,
|
||||
cached_path,
|
||||
hf_bucket_url,
|
||||
is_offline_mode,
|
||||
is_remote_url,
|
||||
logging,
|
||||
)
|
||||
|
||||
from . import __version__
|
||||
|
||||
|
||||
logger = logging.get_logger(__name__)
|
||||
|
||||
@@ -48,14 +51,11 @@ class ConfigMixin:
|
||||
|
||||
"""
|
||||
config_name = None
|
||||
ignore_for_config = []
|
||||
|
||||
def register_to_config(self, **kwargs):
|
||||
def register(self, **kwargs):
|
||||
if self.config_name is None:
|
||||
raise NotImplementedError(f"Make sure that {self.__class__} has defined a class name `config_name`")
|
||||
kwargs["_class_name"] = self.__class__.__name__
|
||||
kwargs["_diffusers_version"] = __version__
|
||||
|
||||
for key, value in kwargs.items():
|
||||
try:
|
||||
setattr(self, key, value)
|
||||
@@ -63,14 +63,10 @@ class ConfigMixin:
|
||||
logger.error(f"Can't set {key} with value {value} for {self}")
|
||||
raise err
|
||||
|
||||
if not hasattr(self, "_internal_dict"):
|
||||
internal_dict = kwargs
|
||||
else:
|
||||
previous_dict = dict(self._internal_dict)
|
||||
internal_dict = {**self._internal_dict, **kwargs}
|
||||
logger.debug(f"Updating config from {previous_dict} to {internal_dict}")
|
||||
if not hasattr(self, "_dict_to_save"):
|
||||
self._dict_to_save = {}
|
||||
|
||||
self._internal_dict = FrozenDict(internal_dict)
|
||||
self._dict_to_save.update(kwargs)
|
||||
|
||||
def save_config(self, save_directory: Union[str, os.PathLike], push_to_hub: bool = False, **kwargs):
|
||||
"""
|
||||
@@ -93,10 +89,132 @@ class ConfigMixin:
|
||||
|
||||
self.to_json_file(output_config_file)
|
||||
logger.info(f"ConfigMixinuration saved in {output_config_file}")
|
||||
|
||||
|
||||
@classmethod
|
||||
def get_config_dict(
|
||||
cls, pretrained_model_name_or_path: Union[str, os.PathLike], **kwargs
|
||||
) -> Tuple[Dict[str, Any], Dict[str, Any]]:
|
||||
cache_dir = kwargs.pop("cache_dir", None)
|
||||
force_download = kwargs.pop("force_download", False)
|
||||
resume_download = kwargs.pop("resume_download", False)
|
||||
proxies = kwargs.pop("proxies", None)
|
||||
use_auth_token = kwargs.pop("use_auth_token", None)
|
||||
local_files_only = kwargs.pop("local_files_only", False)
|
||||
revision = kwargs.pop("revision", None)
|
||||
|
||||
user_agent = {"file_type": "config"}
|
||||
|
||||
if is_offline_mode() and not local_files_only:
|
||||
logger.info("Offline mode: forcing local_files_only=True")
|
||||
local_files_only = True
|
||||
|
||||
pretrained_model_name_or_path = str(pretrained_model_name_or_path)
|
||||
if os.path.isfile(pretrained_model_name_or_path) or is_remote_url(pretrained_model_name_or_path):
|
||||
config_file = pretrained_model_name_or_path
|
||||
else:
|
||||
configuration_file = cls.config_name
|
||||
|
||||
if os.path.isdir(pretrained_model_name_or_path):
|
||||
config_file = os.path.join(pretrained_model_name_or_path, configuration_file)
|
||||
else:
|
||||
config_file = hf_bucket_url(
|
||||
pretrained_model_name_or_path, filename=configuration_file, revision=revision, mirror=None
|
||||
)
|
||||
|
||||
try:
|
||||
# Load from URL or cache if already cached
|
||||
resolved_config_file = cached_path(
|
||||
config_file,
|
||||
cache_dir=cache_dir,
|
||||
force_download=force_download,
|
||||
proxies=proxies,
|
||||
resume_download=resume_download,
|
||||
local_files_only=local_files_only,
|
||||
use_auth_token=use_auth_token,
|
||||
user_agent=user_agent,
|
||||
)
|
||||
|
||||
except RepositoryNotFoundError:
|
||||
raise EnvironmentError(
|
||||
f"{pretrained_model_name_or_path} is not a local folder and is not a valid model identifier listed on "
|
||||
"'https://huggingface.co/models'\nIf this is a private repository, make sure to pass a token having "
|
||||
"permission to this repo with `use_auth_token` or log in with `huggingface-cli login` and pass "
|
||||
"`use_auth_token=True`."
|
||||
)
|
||||
except RevisionNotFoundError:
|
||||
raise EnvironmentError(
|
||||
f"{revision} is not a valid git identifier (branch name, tag name or commit id) that exists for this "
|
||||
f"model name. Check the model page at 'https://huggingface.co/{pretrained_model_name_or_path}' for "
|
||||
"available revisions."
|
||||
)
|
||||
except EntryNotFoundError:
|
||||
raise EnvironmentError(
|
||||
f"{pretrained_model_name_or_path} does not appear to have a file named {configuration_file}."
|
||||
)
|
||||
except HTTPError as err:
|
||||
raise EnvironmentError(
|
||||
f"There was a specific connection error when trying to load {pretrained_model_name_or_path}:\n{err}"
|
||||
)
|
||||
except ValueError:
|
||||
raise EnvironmentError(
|
||||
f"We couldn't connect to '{HUGGINGFACE_CO_RESOLVE_ENDPOINT}' to load this model, couldn't find it in"
|
||||
f" the cached files and it looks like {pretrained_model_name_or_path} is not the path to a directory"
|
||||
f" containing a {configuration_file} file.\nCheckout your internet connection or see how to run the"
|
||||
" library in offline mode at 'https://huggingface.co/docs/diffusers/installation#offline-mode'."
|
||||
)
|
||||
except EnvironmentError:
|
||||
raise EnvironmentError(
|
||||
f"Can't load config for '{pretrained_model_name_or_path}'. If you were trying to load it from "
|
||||
"'https://huggingface.co/models', make sure you don't have a local directory with the same name. "
|
||||
f"Otherwise, make sure '{pretrained_model_name_or_path}' is the correct path to a directory "
|
||||
f"containing a {configuration_file} file"
|
||||
)
|
||||
|
||||
try:
|
||||
# Load config dict
|
||||
config_dict = cls._dict_from_json_file(resolved_config_file)
|
||||
except (json.JSONDecodeError, UnicodeDecodeError):
|
||||
raise EnvironmentError(
|
||||
f"It looks like the config file at '{resolved_config_file}' is not a valid JSON file."
|
||||
)
|
||||
|
||||
if resolved_config_file == config_file:
|
||||
logger.info(f"loading configuration file {config_file}")
|
||||
else:
|
||||
logger.info(f"loading configuration file {config_file} from cache at {resolved_config_file}")
|
||||
|
||||
return config_dict
|
||||
|
||||
@classmethod
|
||||
def extract_init_dict(cls, config_dict, **kwargs):
|
||||
expected_keys = set(dict(inspect.signature(cls.__init__).parameters).keys())
|
||||
expected_keys.remove("self")
|
||||
init_dict = {}
|
||||
for key in expected_keys:
|
||||
if key in kwargs:
|
||||
# overwrite key
|
||||
init_dict[key] = kwargs.pop(key)
|
||||
elif key in config_dict:
|
||||
# use value from config dict
|
||||
init_dict[key] = config_dict.pop(key)
|
||||
|
||||
|
||||
unused_kwargs = config_dict.update(kwargs)
|
||||
|
||||
passed_keys = set(init_dict.keys())
|
||||
if len(expected_keys - passed_keys) > 0:
|
||||
logger.warn(
|
||||
f"{expected_keys - passed_keys} was not found in config. Values will be initialized to default values."
|
||||
)
|
||||
|
||||
return init_dict, unused_kwargs
|
||||
|
||||
@classmethod
|
||||
def from_config(cls, pretrained_model_name_or_path: Union[str, os.PathLike], return_unused_kwargs=False, **kwargs):
|
||||
config_dict = cls.get_config_dict(pretrained_model_name_or_path=pretrained_model_name_or_path, **kwargs)
|
||||
config_dict = cls.get_config_dict(
|
||||
pretrained_model_name_or_path=pretrained_model_name_or_path, **kwargs
|
||||
)
|
||||
|
||||
init_dict, unused_kwargs = cls.extract_init_dict(config_dict, **kwargs)
|
||||
|
||||
@@ -107,146 +225,31 @@ class ConfigMixin:
|
||||
else:
|
||||
return model
|
||||
|
||||
@classmethod
|
||||
def get_config_dict(
|
||||
cls, pretrained_model_name_or_path: Union[str, os.PathLike], **kwargs
|
||||
) -> Tuple[Dict[str, Any], Dict[str, Any]]:
|
||||
cache_dir = kwargs.pop("cache_dir", DIFFUSERS_CACHE)
|
||||
force_download = kwargs.pop("force_download", False)
|
||||
resume_download = kwargs.pop("resume_download", False)
|
||||
proxies = kwargs.pop("proxies", None)
|
||||
use_auth_token = kwargs.pop("use_auth_token", None)
|
||||
local_files_only = kwargs.pop("local_files_only", False)
|
||||
revision = kwargs.pop("revision", None)
|
||||
subfolder = kwargs.pop("subfolder", None)
|
||||
|
||||
user_agent = {"file_type": "config"}
|
||||
|
||||
pretrained_model_name_or_path = str(pretrained_model_name_or_path)
|
||||
|
||||
if cls.config_name is None:
|
||||
raise ValueError(
|
||||
"`self.config_name` is not defined. Note that one should not load a config from "
|
||||
"`ConfigMixin`. Please make sure to define `config_name` in a class inheriting from `ConfigMixin`"
|
||||
)
|
||||
|
||||
if os.path.isfile(pretrained_model_name_or_path):
|
||||
config_file = pretrained_model_name_or_path
|
||||
elif os.path.isdir(pretrained_model_name_or_path):
|
||||
if os.path.isfile(os.path.join(pretrained_model_name_or_path, cls.config_name)):
|
||||
# Load from a PyTorch checkpoint
|
||||
config_file = os.path.join(pretrained_model_name_or_path, cls.config_name)
|
||||
elif subfolder is not None and os.path.isfile(
|
||||
os.path.join(pretrained_model_name_or_path, subfolder, cls.config_name)
|
||||
):
|
||||
config_file = os.path.join(pretrained_model_name_or_path, subfolder, cls.config_name)
|
||||
else:
|
||||
raise EnvironmentError(
|
||||
f"Error no file named {cls.config_name} found in directory {pretrained_model_name_or_path}."
|
||||
)
|
||||
else:
|
||||
try:
|
||||
# Load from URL or cache if already cached
|
||||
config_file = hf_hub_download(
|
||||
pretrained_model_name_or_path,
|
||||
filename=cls.config_name,
|
||||
cache_dir=cache_dir,
|
||||
force_download=force_download,
|
||||
proxies=proxies,
|
||||
resume_download=resume_download,
|
||||
local_files_only=local_files_only,
|
||||
use_auth_token=use_auth_token,
|
||||
user_agent=user_agent,
|
||||
subfolder=subfolder,
|
||||
)
|
||||
|
||||
except RepositoryNotFoundError:
|
||||
raise EnvironmentError(
|
||||
f"{pretrained_model_name_or_path} is not a local folder and is not a valid model identifier"
|
||||
" listed on 'https://huggingface.co/models'\nIf this is a private repository, make sure to pass a"
|
||||
" token having permission to this repo with `use_auth_token` or log in with `huggingface-cli"
|
||||
" login` and pass `use_auth_token=True`."
|
||||
)
|
||||
except RevisionNotFoundError:
|
||||
raise EnvironmentError(
|
||||
f"{revision} is not a valid git identifier (branch name, tag name or commit id) that exists for"
|
||||
" this model name. Check the model page at"
|
||||
f" 'https://huggingface.co/{pretrained_model_name_or_path}' for available revisions."
|
||||
)
|
||||
except EntryNotFoundError:
|
||||
raise EnvironmentError(
|
||||
f"{pretrained_model_name_or_path} does not appear to have a file named {cls.config_name}."
|
||||
)
|
||||
except HTTPError as err:
|
||||
raise EnvironmentError(
|
||||
"There was a specific connection error when trying to load"
|
||||
f" {pretrained_model_name_or_path}:\n{err}"
|
||||
)
|
||||
except ValueError:
|
||||
raise EnvironmentError(
|
||||
f"We couldn't connect to '{HUGGINGFACE_CO_RESOLVE_ENDPOINT}' to load this model, couldn't find it"
|
||||
f" in the cached files and it looks like {pretrained_model_name_or_path} is not the path to a"
|
||||
f" directory containing a {cls.config_name} file.\nCheckout your internet connection or see how to"
|
||||
" run the library in offline mode at"
|
||||
" 'https://huggingface.co/docs/diffusers/installation#offline-mode'."
|
||||
)
|
||||
except EnvironmentError:
|
||||
raise EnvironmentError(
|
||||
f"Can't load config for '{pretrained_model_name_or_path}'. If you were trying to load it from "
|
||||
"'https://huggingface.co/models', make sure you don't have a local directory with the same name. "
|
||||
f"Otherwise, make sure '{pretrained_model_name_or_path}' is the correct path to a directory "
|
||||
f"containing a {cls.config_name} file"
|
||||
)
|
||||
|
||||
try:
|
||||
# Load config dict
|
||||
config_dict = cls._dict_from_json_file(config_file)
|
||||
except (json.JSONDecodeError, UnicodeDecodeError):
|
||||
raise EnvironmentError(f"It looks like the config file at '{config_file}' is not a valid JSON file.")
|
||||
|
||||
return config_dict
|
||||
|
||||
@classmethod
|
||||
def extract_init_dict(cls, config_dict, **kwargs):
|
||||
expected_keys = set(dict(inspect.signature(cls.__init__).parameters).keys())
|
||||
expected_keys.remove("self")
|
||||
# remove general kwargs if present in dict
|
||||
if "kwargs" in expected_keys:
|
||||
expected_keys.remove("kwargs")
|
||||
# remove keys to be ignored
|
||||
if len(cls.ignore_for_config) > 0:
|
||||
expected_keys = expected_keys - set(cls.ignore_for_config)
|
||||
init_dict = {}
|
||||
for key in expected_keys:
|
||||
if key in kwargs:
|
||||
# overwrite key
|
||||
init_dict[key] = kwargs.pop(key)
|
||||
elif key in config_dict:
|
||||
# use value from config dict
|
||||
init_dict[key] = config_dict.pop(key)
|
||||
|
||||
unused_kwargs = config_dict.update(kwargs)
|
||||
|
||||
passed_keys = set(init_dict.keys())
|
||||
if len(expected_keys - passed_keys) > 0:
|
||||
logger.warning(
|
||||
f"{expected_keys - passed_keys} was not found in config. Values will be initialized to default values."
|
||||
)
|
||||
|
||||
return init_dict, unused_kwargs
|
||||
|
||||
@classmethod
|
||||
def _dict_from_json_file(cls, json_file: Union[str, os.PathLike]):
|
||||
with open(json_file, "r", encoding="utf-8") as reader:
|
||||
text = reader.read()
|
||||
return json.loads(text)
|
||||
|
||||
def __eq__(self, other):
|
||||
return self.__dict__ == other.__dict__
|
||||
|
||||
def __repr__(self):
|
||||
return f"{self.__class__.__name__} {self.to_json_string()}"
|
||||
|
||||
@property
|
||||
def config(self) -> Dict[str, Any]:
|
||||
return self._internal_dict
|
||||
def to_dict(self) -> Dict[str, Any]:
|
||||
"""
|
||||
Serializes this instance to a Python dictionary.
|
||||
|
||||
Returns:
|
||||
`Dict[str, Any]`: Dictionary of all the attributes that make up this configuration instance.
|
||||
"""
|
||||
output = copy.deepcopy(self.__dict__)
|
||||
|
||||
# Diffusion version when serializing the model
|
||||
output["diffusers_version"] = __version__
|
||||
|
||||
return output
|
||||
|
||||
def to_json_string(self) -> str:
|
||||
"""
|
||||
@@ -255,7 +258,7 @@ class ConfigMixin:
|
||||
Returns:
|
||||
`str`: String containing all the attributes that make up this configuration instance in JSON format.
|
||||
"""
|
||||
config_dict = self._internal_dict if hasattr(self, "_internal_dict") else {}
|
||||
config_dict = self._dict_to_save
|
||||
return json.dumps(config_dict, indent=2, sort_keys=True) + "\n"
|
||||
|
||||
def to_json_file(self, json_file_path: Union[str, os.PathLike]):
|
||||
@@ -268,78 +271,3 @@ class ConfigMixin:
|
||||
"""
|
||||
with open(json_file_path, "w", encoding="utf-8") as writer:
|
||||
writer.write(self.to_json_string())
|
||||
|
||||
|
||||
class FrozenDict(OrderedDict):
|
||||
def __init__(self, *args, **kwargs):
|
||||
super().__init__(*args, **kwargs)
|
||||
|
||||
for key, value in self.items():
|
||||
setattr(self, key, value)
|
||||
|
||||
self.__frozen = True
|
||||
|
||||
def __delitem__(self, *args, **kwargs):
|
||||
raise Exception(f"You cannot use ``__delitem__`` on a {self.__class__.__name__} instance.")
|
||||
|
||||
def setdefault(self, *args, **kwargs):
|
||||
raise Exception(f"You cannot use ``setdefault`` on a {self.__class__.__name__} instance.")
|
||||
|
||||
def pop(self, *args, **kwargs):
|
||||
raise Exception(f"You cannot use ``pop`` on a {self.__class__.__name__} instance.")
|
||||
|
||||
def update(self, *args, **kwargs):
|
||||
raise Exception(f"You cannot use ``update`` on a {self.__class__.__name__} instance.")
|
||||
|
||||
def __setattr__(self, name, value):
|
||||
if hasattr(self, "__frozen") and self.__frozen:
|
||||
raise Exception(f"You cannot use ``__setattr__`` on a {self.__class__.__name__} instance.")
|
||||
super().__setattr__(name, value)
|
||||
|
||||
def __setitem__(self, name, value):
|
||||
if hasattr(self, "__frozen") and self.__frozen:
|
||||
raise Exception(f"You cannot use ``__setattr__`` on a {self.__class__.__name__} instance.")
|
||||
super().__setitem__(name, value)
|
||||
|
||||
|
||||
def register_to_config(init):
|
||||
"""
|
||||
Decorator to apply on the init of classes inheriting from `ConfigMixin` so that all the arguments are automatically
|
||||
sent to `self.register_for_config`. To ignore a specific argument accepted by the init but that shouldn't be
|
||||
registered in the config, use the `ignore_for_config` class variable
|
||||
|
||||
Warning: Once decorated, all private arguments (beginning with an underscore) are trashed and not sent to the init!
|
||||
"""
|
||||
|
||||
@functools.wraps(init)
|
||||
def inner_init(self, *args, **kwargs):
|
||||
# Ignore private kwargs in the init.
|
||||
init_kwargs = {k: v for k, v in kwargs.items() if not k.startswith("_")}
|
||||
init(self, *args, **init_kwargs)
|
||||
if not isinstance(self, ConfigMixin):
|
||||
raise RuntimeError(
|
||||
f"`@register_for_config` was applied to {self.__class__.__name__} init method, but this class does "
|
||||
"not inherit from `ConfigMixin`."
|
||||
)
|
||||
|
||||
ignore = getattr(self, "ignore_for_config", [])
|
||||
# Get positional arguments aligned with kwargs
|
||||
new_kwargs = {}
|
||||
signature = inspect.signature(init)
|
||||
parameters = {
|
||||
name: p.default for i, (name, p) in enumerate(signature.parameters.items()) if i > 0 and name not in ignore
|
||||
}
|
||||
for arg, name in zip(args, parameters.keys()):
|
||||
new_kwargs[name] = arg
|
||||
|
||||
# Then add all kwargs
|
||||
new_kwargs.update(
|
||||
{
|
||||
k: init_kwargs.get(k, default)
|
||||
for k, default in parameters.items()
|
||||
if k not in ignore and k not in new_kwargs
|
||||
}
|
||||
)
|
||||
getattr(self, "register_to_config")(**new_kwargs)
|
||||
|
||||
return inner_init
|
||||
|
||||
@@ -3,16 +3,29 @@
|
||||
# 2. run `make deps_table_update``
|
||||
deps = {
|
||||
"Pillow": "Pillow",
|
||||
"accelerate": "accelerate>=0.9.0",
|
||||
"black": "black~=22.0,>=22.3",
|
||||
"filelock": "filelock",
|
||||
"flake8": "flake8>=3.8.3",
|
||||
"huggingface-hub": "huggingface-hub",
|
||||
"codecarbon": "codecarbon==1.2.0",
|
||||
"dataclasses": "dataclasses",
|
||||
"datasets": "datasets",
|
||||
"GitPython": "GitPython<3.1.19",
|
||||
"hf-doc-builder": "hf-doc-builder>=0.3.0",
|
||||
"huggingface-hub": "huggingface-hub>=0.1.0,<1.0",
|
||||
"importlib_metadata": "importlib_metadata",
|
||||
"isort": "isort>=5.5.4",
|
||||
"numpy": "numpy",
|
||||
"numpy": "numpy>=1.17",
|
||||
"pytest": "pytest",
|
||||
"pytest-timeout": "pytest-timeout",
|
||||
"pytest-xdist": "pytest-xdist",
|
||||
"python": "python>=3.7.0",
|
||||
"regex": "regex!=2019.12.17",
|
||||
"requests": "requests",
|
||||
"sagemaker": "sagemaker>=2.31.0",
|
||||
"tokenizers": "tokenizers>=0.11.1,!=0.11.3,<0.13",
|
||||
"torch": "torch>=1.4",
|
||||
"tensorboard": "tensorboard",
|
||||
"modelcards": "modelcards==0.1.4",
|
||||
"torchaudio": "torchaudio",
|
||||
"tqdm": "tqdm>=4.27",
|
||||
"unidic": "unidic>=1.0.2",
|
||||
"unidic_lite": "unidic_lite>=1.0.7",
|
||||
"uvicorn": "uvicorn",
|
||||
}
|
||||
|
||||
@@ -22,9 +22,16 @@ import sys
|
||||
from pathlib import Path
|
||||
from typing import Dict, Optional, Union
|
||||
|
||||
from huggingface_hub import cached_download
|
||||
from huggingface_hub import HfFolder, model_info
|
||||
|
||||
from .utils import DIFFUSERS_DYNAMIC_MODULE_NAME, HF_MODULES_CACHE, logging
|
||||
from transformers.utils import (
|
||||
HF_MODULES_CACHE,
|
||||
TRANSFORMERS_DYNAMIC_MODULE_NAME,
|
||||
cached_path,
|
||||
hf_bucket_url,
|
||||
is_offline_mode,
|
||||
logging,
|
||||
)
|
||||
|
||||
|
||||
logger = logging.get_logger(__name__) # pylint: disable=invalid-name
|
||||
@@ -210,30 +217,27 @@ def get_cached_module_file(
|
||||
module_file_or_url = os.path.join(pretrained_model_name_or_path, module_file)
|
||||
submodule = "local"
|
||||
|
||||
if os.path.isfile(module_file_or_url):
|
||||
resolved_module_file = module_file_or_url
|
||||
else:
|
||||
try:
|
||||
# Load from URL or cache if already cached
|
||||
resolved_module_file = cached_download(
|
||||
module_file_or_url,
|
||||
cache_dir=cache_dir,
|
||||
force_download=force_download,
|
||||
proxies=proxies,
|
||||
resume_download=resume_download,
|
||||
local_files_only=local_files_only,
|
||||
use_auth_token=use_auth_token,
|
||||
)
|
||||
try:
|
||||
# Load from URL or cache if already cached
|
||||
resolved_module_file = cached_path(
|
||||
module_file_or_url,
|
||||
cache_dir=cache_dir,
|
||||
force_download=force_download,
|
||||
proxies=proxies,
|
||||
resume_download=resume_download,
|
||||
local_files_only=local_files_only,
|
||||
use_auth_token=use_auth_token,
|
||||
)
|
||||
|
||||
except EnvironmentError:
|
||||
logger.error(f"Could not locate the {module_file} inside {pretrained_model_name_or_path}.")
|
||||
raise
|
||||
except EnvironmentError:
|
||||
logger.error(f"Could not locate the {module_file} inside {pretrained_model_name_or_path}.")
|
||||
raise
|
||||
|
||||
# Check we have all the requirements in our environment
|
||||
modules_needed = check_imports(resolved_module_file)
|
||||
|
||||
# Now we move the module inside our cached dynamic modules.
|
||||
full_submodule = DIFFUSERS_DYNAMIC_MODULE_NAME + os.path.sep + submodule
|
||||
full_submodule = TRANSFORMERS_DYNAMIC_MODULE_NAME + os.path.sep + submodule
|
||||
create_dynamic_module(full_submodule)
|
||||
submodule_path = Path(HF_MODULES_CACHE) / full_submodule
|
||||
# We always copy local files (we could hash the file to see if there was a change, and give them the name of
|
||||
|
||||
@@ -1,198 +0,0 @@
|
||||
# coding=utf-8
|
||||
# Copyright 2022 The HuggingFace Inc. team.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
|
||||
import os
|
||||
import shutil
|
||||
from pathlib import Path
|
||||
from typing import Optional
|
||||
|
||||
from diffusers import DiffusionPipeline
|
||||
from huggingface_hub import HfFolder, Repository, whoami
|
||||
from utils import is_modelcards_available
|
||||
|
||||
|
||||
if is_modelcards_available():
|
||||
from modelcards import CardData, ModelCard
|
||||
|
||||
from .utils import logging
|
||||
|
||||
|
||||
logger = logging.get_logger(__name__)
|
||||
|
||||
|
||||
MODEL_CARD_TEMPLATE_PATH = Path(__file__).parent / "utils" / "model_card_template.md"
|
||||
|
||||
|
||||
def get_full_repo_name(model_id: str, organization: Optional[str] = None, token: Optional[str] = None):
|
||||
if token is None:
|
||||
token = HfFolder.get_token()
|
||||
if organization is None:
|
||||
username = whoami(token)["name"]
|
||||
return f"{username}/{model_id}"
|
||||
else:
|
||||
return f"{organization}/{model_id}"
|
||||
|
||||
|
||||
def init_git_repo(args, at_init: bool = False):
|
||||
"""
|
||||
Args:
|
||||
Initializes a git repo in `args.hub_model_id`.
|
||||
at_init (`bool`, *optional*, defaults to `False`):
|
||||
Whether this function is called before any training or not. If `self.args.overwrite_output_dir` is `True`
|
||||
and `at_init` is `True`, the path to the repo (which is `self.args.output_dir`) might be wiped out.
|
||||
"""
|
||||
if hasattr(args, "local_rank") and args.local_rank not in [-1, 0]:
|
||||
return
|
||||
hub_token = args.hub_token if hasattr(args, "hub_token") else None
|
||||
use_auth_token = True if hub_token is None else hub_token
|
||||
if not hasattr(args, "hub_model_id") or args.hub_model_id is None:
|
||||
repo_name = Path(args.output_dir).absolute().name
|
||||
else:
|
||||
repo_name = args.hub_model_id
|
||||
if "/" not in repo_name:
|
||||
repo_name = get_full_repo_name(repo_name, token=hub_token)
|
||||
|
||||
try:
|
||||
repo = Repository(
|
||||
args.output_dir,
|
||||
clone_from=repo_name,
|
||||
use_auth_token=use_auth_token,
|
||||
private=args.hub_private_repo,
|
||||
)
|
||||
except EnvironmentError:
|
||||
if args.overwrite_output_dir and at_init:
|
||||
# Try again after wiping output_dir
|
||||
shutil.rmtree(args.output_dir)
|
||||
repo = Repository(
|
||||
args.output_dir,
|
||||
clone_from=repo_name,
|
||||
use_auth_token=use_auth_token,
|
||||
)
|
||||
else:
|
||||
raise
|
||||
|
||||
repo.git_pull()
|
||||
|
||||
# By default, ignore the checkpoint folders
|
||||
if not os.path.exists(os.path.join(args.output_dir, ".gitignore")):
|
||||
with open(os.path.join(args.output_dir, ".gitignore"), "w", encoding="utf-8") as writer:
|
||||
writer.writelines(["checkpoint-*/"])
|
||||
|
||||
return repo
|
||||
|
||||
|
||||
def push_to_hub(
|
||||
args,
|
||||
pipeline: DiffusionPipeline,
|
||||
repo: Repository,
|
||||
commit_message: Optional[str] = "End of training",
|
||||
blocking: bool = True,
|
||||
**kwargs,
|
||||
) -> str:
|
||||
"""
|
||||
Parameters:
|
||||
Upload *self.model* and *self.tokenizer* to the 🤗 model hub on the repo *self.args.hub_model_id*.
|
||||
commit_message (`str`, *optional*, defaults to `"End of training"`):
|
||||
Message to commit while pushing.
|
||||
blocking (`bool`, *optional*, defaults to `True`):
|
||||
Whether the function should return only when the `git push` has finished.
|
||||
kwargs:
|
||||
Additional keyword arguments passed along to [`create_model_card`].
|
||||
Returns:
|
||||
The url of the commit of your model in the given repository if `blocking=False`, a tuple with the url of the
|
||||
commit and an object to track the progress of the commit if `blocking=True`
|
||||
"""
|
||||
|
||||
if not hasattr(args, "hub_model_id") or args.hub_model_id is None:
|
||||
model_name = Path(args.output_dir).name
|
||||
else:
|
||||
model_name = args.hub_model_id.split("/")[-1]
|
||||
|
||||
output_dir = args.output_dir
|
||||
os.makedirs(output_dir, exist_ok=True)
|
||||
logger.info(f"Saving pipeline checkpoint to {output_dir}")
|
||||
pipeline.save_pretrained(output_dir)
|
||||
|
||||
# Only push from one node.
|
||||
if hasattr(args, "local_rank") and args.local_rank not in [-1, 0]:
|
||||
return
|
||||
|
||||
# Cancel any async push in progress if blocking=True. The commits will all be pushed together.
|
||||
if (
|
||||
blocking
|
||||
and len(repo.command_queue) > 0
|
||||
and repo.command_queue[-1] is not None
|
||||
and not repo.command_queue[-1].is_done
|
||||
):
|
||||
repo.command_queue[-1]._process.kill()
|
||||
|
||||
git_head_commit_url = repo.push_to_hub(commit_message=commit_message, blocking=blocking, auto_lfs_prune=True)
|
||||
# push separately the model card to be independent from the rest of the model
|
||||
create_model_card(args, model_name=model_name)
|
||||
try:
|
||||
repo.push_to_hub(commit_message="update model card README.md", blocking=blocking, auto_lfs_prune=True)
|
||||
except EnvironmentError as exc:
|
||||
logger.error(f"Error pushing update to the model card. Please read logs and retry.\n${exc}")
|
||||
|
||||
return git_head_commit_url
|
||||
|
||||
|
||||
def create_model_card(args, model_name):
|
||||
if not is_modelcards_available:
|
||||
raise ValueError(
|
||||
"Please make sure to have `modelcards` installed when using the `create_model_card` function. You can"
|
||||
" install the package with `pip install modelcards`."
|
||||
)
|
||||
|
||||
if hasattr(args, "local_rank") and args.local_rank not in [-1, 0]:
|
||||
return
|
||||
|
||||
hub_token = args.hub_token if hasattr(args, "hub_token") else None
|
||||
repo_name = get_full_repo_name(model_name, token=hub_token)
|
||||
|
||||
model_card = ModelCard.from_template(
|
||||
card_data=CardData( # Card metadata object that will be converted to YAML block
|
||||
language="en",
|
||||
license="apache-2.0",
|
||||
library_name="diffusers",
|
||||
tags=[],
|
||||
datasets=args.dataset,
|
||||
metrics=[],
|
||||
),
|
||||
template_path=MODEL_CARD_TEMPLATE_PATH,
|
||||
model_name=model_name,
|
||||
repo_name=repo_name,
|
||||
dataset_name=args.dataset if hasattr(args, "dataset") else None,
|
||||
learning_rate=args.learning_rate,
|
||||
train_batch_size=args.train_batch_size,
|
||||
eval_batch_size=args.eval_batch_size,
|
||||
gradient_accumulation_steps=args.gradient_accumulation_steps
|
||||
if hasattr(args, "gradient_accumulation_steps")
|
||||
else None,
|
||||
adam_beta1=args.adam_beta1 if hasattr(args, "adam_beta1") else None,
|
||||
adam_beta2=args.adam_beta2 if hasattr(args, "adam_beta2") else None,
|
||||
adam_weight_decay=args.adam_weight_decay if hasattr(args, "adam_weight_decay") else None,
|
||||
adam_epsilon=args.adam_epsilon if hasattr(args, "adam_weight_decay") else None,
|
||||
lr_scheduler=args.lr_scheduler if hasattr(args, "lr_scheduler") else None,
|
||||
lr_warmup_steps=args.lr_warmup_steps if hasattr(args, "lr_warmup_steps") else None,
|
||||
ema_inv_gamma=args.ema_inv_gamma if hasattr(args, "ema_inv_gamma") else None,
|
||||
ema_power=args.ema_power if hasattr(args, "ema_power") else None,
|
||||
ema_max_decay=args.ema_max_decay if hasattr(args, "ema_max_decay") else None,
|
||||
mixed_precision=args.mixed_precision,
|
||||
)
|
||||
|
||||
card_path = os.path.join(args.output_dir, "README.md")
|
||||
model_card.save(card_path)
|
||||
@@ -20,21 +20,24 @@ from typing import Callable, List, Optional, Tuple, Union
|
||||
import torch
|
||||
from torch import Tensor, device
|
||||
|
||||
from huggingface_hub import hf_hub_download
|
||||
from requests import HTTPError
|
||||
|
||||
from .utils import (
|
||||
# CHANGE to diffusers.utils
|
||||
from transformers.utils import (
|
||||
CONFIG_NAME,
|
||||
DIFFUSERS_CACHE,
|
||||
HUGGINGFACE_CO_RESOLVE_ENDPOINT,
|
||||
EntryNotFoundError,
|
||||
RepositoryNotFoundError,
|
||||
RevisionNotFoundError,
|
||||
cached_path,
|
||||
hf_bucket_url,
|
||||
is_offline_mode,
|
||||
is_remote_url,
|
||||
logging,
|
||||
)
|
||||
|
||||
|
||||
WEIGHTS_NAME = "diffusion_pytorch_model.bin"
|
||||
WEIGHTS_NAME = "diffusion_model.pt"
|
||||
|
||||
|
||||
logger = logging.get_logger(__name__)
|
||||
@@ -123,16 +126,16 @@ class ModelMixin(torch.nn.Module):
|
||||
r"""
|
||||
Base class for all models.
|
||||
|
||||
[`ModelMixin`] takes care of storing the configuration of the models and handles methods for loading, downloading
|
||||
and saving models as well as a few methods common to all models to:
|
||||
[`ModelMixin`] takes care of storing the configuration of the models and handles methods for loading,
|
||||
downloading and saving models as well as a few methods common to all models to:
|
||||
|
||||
- resize the input embeddings,
|
||||
- prune heads in the self-attention heads.
|
||||
|
||||
Class attributes (overridden by derived classes):
|
||||
|
||||
- **config_class** ([`ConfigMixin`]) -- A subclass of [`ConfigMixin`] to use as configuration class for this
|
||||
model architecture.
|
||||
- **config_class** ([`ConfigMixin`]) -- A subclass of [`ConfigMixin`] to use as configuration class
|
||||
for this model architecture.
|
||||
- **load_tf_weights** (`Callable`) -- A python *method* for loading a TensorFlow checkpoint in a PyTorch model,
|
||||
taking as arguments:
|
||||
|
||||
@@ -147,7 +150,6 @@ class ModelMixin(torch.nn.Module):
|
||||
models, `pixel_values` for vision models and `input_values` for speech models).
|
||||
"""
|
||||
config_name = CONFIG_NAME
|
||||
_automatically_saved_args = ["_diffusers_version", "_class_name", "_name_or_path"]
|
||||
|
||||
def __init__(self):
|
||||
super().__init__()
|
||||
@@ -228,8 +230,8 @@ class ModelMixin(torch.nn.Module):
|
||||
- A string, the *model id* of a pretrained model hosted inside a model repo on huggingface.co.
|
||||
Valid model ids can be located at the root-level, like `bert-base-uncased`, or namespaced under a
|
||||
user or organization name, like `dbmdz/bert-base-german-cased`.
|
||||
- A path to a *directory* containing model weights saved using [`~ModelMixin.save_pretrained`],
|
||||
e.g., `./my_model_directory/`.
|
||||
- A path to a *directory* containing model weights saved using
|
||||
[`~ModelMixin.save_pretrained`], e.g., `./my_model_directory/`.
|
||||
|
||||
config (`Union[ConfigMixin, str, os.PathLike]`, *optional*):
|
||||
Can be either:
|
||||
@@ -237,13 +239,13 @@ class ModelMixin(torch.nn.Module):
|
||||
- an instance of a class derived from [`ConfigMixin`],
|
||||
- a string or path valid as input to [`~ConfigMixin.from_pretrained`].
|
||||
|
||||
ConfigMixinuration for the model to use instead of an automatically loaded configuration.
|
||||
ConfigMixinuration can be automatically loaded when:
|
||||
ConfigMixinuration for the model to use instead of an automatically loaded configuration. ConfigMixinuration can
|
||||
be automatically loaded when:
|
||||
|
||||
- The model is a model provided by the library (loaded with the *model id* string of a pretrained
|
||||
model).
|
||||
- The model was saved using [`~ModelMixin.save_pretrained`] and is reloaded by supplying the save
|
||||
directory.
|
||||
- The model was saved using [`~ModelMixin.save_pretrained`] and is reloaded by supplying the
|
||||
save directory.
|
||||
- The model is loaded by supplying a local directory as `pretrained_model_name_or_path` and a
|
||||
configuration JSON file named *config.json* is found in the directory.
|
||||
cache_dir (`Union[str, os.PathLike]`, *optional*):
|
||||
@@ -293,10 +295,10 @@ class ModelMixin(torch.nn.Module):
|
||||
underlying model's `__init__` method (we assume all relevant updates to the configuration have
|
||||
already been done)
|
||||
- If a configuration is not provided, `kwargs` will be first passed to the configuration class
|
||||
initialization function ([`~ConfigMixin.from_pretrained`]). Each key of `kwargs` that corresponds
|
||||
to a configuration attribute will be used to override said attribute with the supplied `kwargs`
|
||||
value. Remaining keys that do not correspond to any configuration attribute will be passed to the
|
||||
underlying model's `__init__` function.
|
||||
initialization function ([`~ConfigMixin.from_pretrained`]). Each key of `kwargs` that
|
||||
corresponds to a configuration attribute will be used to override said attribute with the
|
||||
supplied `kwargs` value. Remaining keys that do not correspond to any configuration attribute
|
||||
will be passed to the underlying model's `__init__` function.
|
||||
|
||||
<Tip>
|
||||
|
||||
@@ -312,7 +314,7 @@ class ModelMixin(torch.nn.Module):
|
||||
</Tip>
|
||||
|
||||
"""
|
||||
cache_dir = kwargs.pop("cache_dir", DIFFUSERS_CACHE)
|
||||
cache_dir = kwargs.pop("cache_dir", None)
|
||||
ignore_mismatched_sizes = kwargs.pop("ignore_mismatched_sizes", False)
|
||||
force_download = kwargs.pop("force_download", False)
|
||||
resume_download = kwargs.pop("resume_download", False)
|
||||
@@ -321,11 +323,15 @@ class ModelMixin(torch.nn.Module):
|
||||
local_files_only = kwargs.pop("local_files_only", False)
|
||||
use_auth_token = kwargs.pop("use_auth_token", None)
|
||||
revision = kwargs.pop("revision", None)
|
||||
mirror = kwargs.pop("mirror", None)
|
||||
from_auto_class = kwargs.pop("_from_auto", False)
|
||||
subfolder = kwargs.pop("subfolder", None)
|
||||
|
||||
user_agent = {"file_type": "model", "framework": "pytorch", "from_auto_class": from_auto_class}
|
||||
|
||||
if is_offline_mode() and not local_files_only:
|
||||
logger.info("Offline mode: forcing local_files_only=True")
|
||||
local_files_only = True
|
||||
|
||||
# Load config if we don't provide a configuration
|
||||
config_path = pretrained_model_name_or_path
|
||||
model, unused_kwargs = cls.from_config(
|
||||
@@ -338,85 +344,88 @@ class ModelMixin(torch.nn.Module):
|
||||
local_files_only=local_files_only,
|
||||
use_auth_token=use_auth_token,
|
||||
revision=revision,
|
||||
subfolder=subfolder,
|
||||
**kwargs,
|
||||
)
|
||||
model.register_to_config(_name_or_path=pretrained_model_name_or_path)
|
||||
model.register(name_or_path=pretrained_model_name_or_path)
|
||||
# This variable will flag if we're loading a sharded checkpoint. In this case the archive file is just the
|
||||
# Load model
|
||||
pretrained_model_name_or_path = str(pretrained_model_name_or_path)
|
||||
if os.path.isdir(pretrained_model_name_or_path):
|
||||
if os.path.isfile(os.path.join(pretrained_model_name_or_path, WEIGHTS_NAME)):
|
||||
# Load from a PyTorch checkpoint
|
||||
model_file = os.path.join(pretrained_model_name_or_path, WEIGHTS_NAME)
|
||||
elif subfolder is not None and os.path.isfile(
|
||||
os.path.join(pretrained_model_name_or_path, subfolder, WEIGHTS_NAME)
|
||||
):
|
||||
model_file = os.path.join(pretrained_model_name_or_path, subfolder, WEIGHTS_NAME)
|
||||
archive_file = os.path.join(pretrained_model_name_or_path, WEIGHTS_NAME)
|
||||
else:
|
||||
raise EnvironmentError(
|
||||
f"Error no file named {WEIGHTS_NAME} found in directory {pretrained_model_name_or_path}."
|
||||
)
|
||||
elif os.path.isfile(pretrained_model_name_or_path) or is_remote_url(pretrained_model_name_or_path):
|
||||
archive_file = pretrained_model_name_or_path
|
||||
else:
|
||||
try:
|
||||
# Load from URL or cache if already cached
|
||||
model_file = hf_hub_download(
|
||||
pretrained_model_name_or_path,
|
||||
filename=WEIGHTS_NAME,
|
||||
cache_dir=cache_dir,
|
||||
force_download=force_download,
|
||||
proxies=proxies,
|
||||
resume_download=resume_download,
|
||||
local_files_only=local_files_only,
|
||||
use_auth_token=use_auth_token,
|
||||
user_agent=user_agent,
|
||||
subfolder=subfolder,
|
||||
)
|
||||
filename = WEIGHTS_NAME
|
||||
|
||||
except RepositoryNotFoundError:
|
||||
raise EnvironmentError(
|
||||
f"{pretrained_model_name_or_path} is not a local folder and is not a valid model identifier "
|
||||
"listed on 'https://huggingface.co/models'\nIf this is a private repository, make sure to pass a "
|
||||
"token having permission to this repo with `use_auth_token` or log in with `huggingface-cli "
|
||||
"login` and pass `use_auth_token=True`."
|
||||
)
|
||||
except RevisionNotFoundError:
|
||||
raise EnvironmentError(
|
||||
f"{revision} is not a valid git identifier (branch name, tag name or commit id) that exists for "
|
||||
"this model name. Check the model page at "
|
||||
f"'https://huggingface.co/{pretrained_model_name_or_path}' for available revisions."
|
||||
)
|
||||
except EntryNotFoundError:
|
||||
raise EnvironmentError(
|
||||
f"{pretrained_model_name_or_path} does not appear to have a file named {model_file}."
|
||||
)
|
||||
except HTTPError as err:
|
||||
raise EnvironmentError(
|
||||
"There was a specific connection error when trying to load"
|
||||
f" {pretrained_model_name_or_path}:\n{err}"
|
||||
)
|
||||
except ValueError:
|
||||
raise EnvironmentError(
|
||||
f"We couldn't connect to '{HUGGINGFACE_CO_RESOLVE_ENDPOINT}' to load this model, couldn't find it"
|
||||
f" in the cached files and it looks like {pretrained_model_name_or_path} is not the path to a"
|
||||
f" directory containing a file named {WEIGHTS_NAME} or"
|
||||
" \nCheckout your internet connection or see how to run the library in"
|
||||
" offline mode at 'https://huggingface.co/docs/transformers/installation#offline-mode'."
|
||||
)
|
||||
except EnvironmentError:
|
||||
raise EnvironmentError(
|
||||
f"Can't load the model for '{pretrained_model_name_or_path}'. If you were trying to load it from "
|
||||
"'https://huggingface.co/models', make sure you don't have a local directory with the same name. "
|
||||
f"Otherwise, make sure '{pretrained_model_name_or_path}' is the correct path to a directory "
|
||||
f"containing a file named {WEIGHTS_NAME}"
|
||||
)
|
||||
archive_file = hf_bucket_url(
|
||||
pretrained_model_name_or_path, filename=filename, revision=revision, mirror=mirror
|
||||
)
|
||||
|
||||
# restore default dtype
|
||||
state_dict = load_state_dict(model_file)
|
||||
try:
|
||||
# Load from URL or cache if already cached
|
||||
resolved_archive_file = cached_path(
|
||||
archive_file,
|
||||
cache_dir=cache_dir,
|
||||
force_download=force_download,
|
||||
proxies=proxies,
|
||||
resume_download=resume_download,
|
||||
local_files_only=local_files_only,
|
||||
use_auth_token=use_auth_token,
|
||||
user_agent=user_agent,
|
||||
)
|
||||
|
||||
except RepositoryNotFoundError:
|
||||
raise EnvironmentError(
|
||||
f"{pretrained_model_name_or_path} is not a local folder and is not a valid model identifier "
|
||||
"listed on 'https://huggingface.co/models'\nIf this is a private repository, make sure to pass a "
|
||||
"token having permission to this repo with `use_auth_token` or log in with `huggingface-cli "
|
||||
"login` and pass `use_auth_token=True`."
|
||||
)
|
||||
except RevisionNotFoundError:
|
||||
raise EnvironmentError(
|
||||
f"{revision} is not a valid git identifier (branch name, tag name or commit id) that exists for "
|
||||
"this model name. Check the model page at "
|
||||
f"'https://huggingface.co/{pretrained_model_name_or_path}' for available revisions."
|
||||
)
|
||||
except EntryNotFoundError:
|
||||
raise EnvironmentError(f"{pretrained_model_name_or_path} does not appear to have a file named {filename}.")
|
||||
except HTTPError as err:
|
||||
raise EnvironmentError(
|
||||
f"There was a specific connection error when trying to load {pretrained_model_name_or_path}:\n{err}"
|
||||
)
|
||||
except ValueError:
|
||||
raise EnvironmentError(
|
||||
f"We couldn't connect to '{HUGGINGFACE_CO_RESOLVE_ENDPOINT}' to load this model, couldn't find it"
|
||||
f" in the cached files and it looks like {pretrained_model_name_or_path} is not the path to a"
|
||||
f" directory containing a file named {WEIGHTS_NAME} or"
|
||||
" \nCheckout your internet connection or see how to run the library in"
|
||||
" offline mode at 'https://huggingface.co/docs/transformers/installation#offline-mode'."
|
||||
)
|
||||
except EnvironmentError:
|
||||
raise EnvironmentError(
|
||||
f"Can't load the model for '{pretrained_model_name_or_path}'. If you were trying to load it from "
|
||||
"'https://huggingface.co/models', make sure you don't have a local directory with the same name. "
|
||||
f"Otherwise, make sure '{pretrained_model_name_or_path}' is the correct path to a directory "
|
||||
f"containing a file named {WEIGHTS_NAME}"
|
||||
)
|
||||
|
||||
if resolved_archive_file == archive_file:
|
||||
logger.info(f"loading weights file {archive_file}")
|
||||
else:
|
||||
logger.info(f"loading weights file {archive_file} from cache at {resolved_archive_file}")
|
||||
|
||||
# restore default dtype
|
||||
state_dict = load_state_dict(resolved_archive_file)
|
||||
model, missing_keys, unexpected_keys, mismatched_keys, error_msgs = cls._load_pretrained_model(
|
||||
model,
|
||||
state_dict,
|
||||
model_file,
|
||||
resolved_archive_file,
|
||||
pretrained_model_name_or_path,
|
||||
ignore_mismatched_sizes=ignore_mismatched_sizes,
|
||||
)
|
||||
@@ -501,12 +510,11 @@ class ModelMixin(torch.nn.Module):
|
||||
logger.warning(
|
||||
f"Some weights of the model checkpoint at {pretrained_model_name_or_path} were not used when"
|
||||
f" initializing {model.__class__.__name__}: {unexpected_keys}\n- This IS expected if you are"
|
||||
f" initializing {model.__class__.__name__} from the checkpoint of a model trained on another task"
|
||||
" or with another architecture (e.g. initializing a BertForSequenceClassification model from a"
|
||||
f" initializing {model.__class__.__name__} from the checkpoint of a model trained on another task or"
|
||||
" with another architecture (e.g. initializing a BertForSequenceClassification model from a"
|
||||
" BertForPreTraining model).\n- This IS NOT expected if you are initializing"
|
||||
f" {model.__class__.__name__} from the checkpoint of a model that you expect to be exactly"
|
||||
" identical (initializing a BertForSequenceClassification model from a"
|
||||
" BertForSequenceClassification model)."
|
||||
f" {model.__class__.__name__} from the checkpoint of a model that you expect to be exactly identical"
|
||||
" (initializing a BertForSequenceClassification model from a BertForSequenceClassification model)."
|
||||
)
|
||||
else:
|
||||
logger.info(f"All model checkpoint weights were used when initializing {model.__class__.__name__}.\n")
|
||||
@@ -519,9 +527,9 @@ class ModelMixin(torch.nn.Module):
|
||||
elif len(mismatched_keys) == 0:
|
||||
logger.info(
|
||||
f"All the weights of {model.__class__.__name__} were initialized from the model checkpoint at"
|
||||
f" {pretrained_model_name_or_path}.\nIf your task is similar to the task the model of the"
|
||||
f" checkpoint was trained on, you can already use {model.__class__.__name__} for predictions"
|
||||
" without further training."
|
||||
f" {pretrained_model_name_or_path}.\nIf your task is similar to the task the model of the checkpoint"
|
||||
f" was trained on, you can already use {model.__class__.__name__} for predictions without further"
|
||||
" training."
|
||||
)
|
||||
if len(mismatched_keys) > 0:
|
||||
mismatched_warning = "\n".join(
|
||||
@@ -533,8 +541,8 @@ class ModelMixin(torch.nn.Module):
|
||||
logger.warning(
|
||||
f"Some weights of {model.__class__.__name__} were not initialized from the model checkpoint at"
|
||||
f" {pretrained_model_name_or_path} and are newly initialized because the shapes did not"
|
||||
f" match:\n{mismatched_warning}\nYou should probably TRAIN this model on a down-stream task to be"
|
||||
" able to use it for predictions and inference."
|
||||
f" match:\n{mismatched_warning}\nYou should probably TRAIN this model on a down-stream task to be able"
|
||||
" to use it for predictions and inference."
|
||||
)
|
||||
|
||||
return model, missing_keys, unexpected_keys, mismatched_keys, error_msgs
|
||||
@@ -581,17 +589,3 @@ class ModelMixin(torch.nn.Module):
|
||||
return sum(p.numel() for p in non_embedding_parameters if p.requires_grad or not only_trainable)
|
||||
else:
|
||||
return sum(p.numel() for p in self.parameters() if p.requires_grad or not only_trainable)
|
||||
|
||||
|
||||
def unwrap_model(model: torch.nn.Module) -> torch.nn.Module:
|
||||
"""
|
||||
Recursively unwraps a model from potential containers (as used in distributed training).
|
||||
|
||||
Args:
|
||||
model (`torch.nn.Module`): The model to unwrap.
|
||||
"""
|
||||
# since there could be multiple levels of wrapping, unwrap recursively
|
||||
if hasattr(model, "module"):
|
||||
return unwrap_model(model.module)
|
||||
else:
|
||||
return model
|
||||
|
||||
@@ -1,11 +0,0 @@
|
||||
# Models
|
||||
|
||||
- Models: Neural network that models $p_\theta(\mathbf{x}_{t-1}|\mathbf{x}_t)$ (see image below) and is trained end-to-end to denoise a noisy input to an image. Examples: UNet, Conditioned UNet, 3D UNet, Transformer UNet
|
||||
|
||||
## API
|
||||
|
||||
TODO(Suraj, Patrick)
|
||||
|
||||
## Examples
|
||||
|
||||
TODO(Suraj, Patrick)
|
||||
@@ -16,6 +16,5 @@
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
from .unet_2d import UNet2DModel
|
||||
from .unet_2d_condition import UNet2DConditionModel
|
||||
from .vae import AutoencoderKL, VQModel
|
||||
from .unet import UNetModel
|
||||
from .unet_glide import UNetGLIDEModel
|
||||
|
||||
@@ -1,434 +0,0 @@
|
||||
import math
|
||||
from inspect import isfunction
|
||||
|
||||
import torch
|
||||
import torch.nn.functional as F
|
||||
from torch import nn
|
||||
|
||||
|
||||
class AttentionBlockNew(nn.Module):
|
||||
"""
|
||||
An attention block that allows spatial positions to attend to each other. Originally ported from here, but adapted
|
||||
to the N-d case.
|
||||
https://github.com/hojonathanho/diffusion/blob/1e0dceb3b3495bbe19116a5e1b3596cd0706c543/diffusion_tf/models/unet.py#L66.
|
||||
Uses three q, k, v linear layers to compute attention
|
||||
"""
|
||||
|
||||
def __init__(
|
||||
self,
|
||||
channels,
|
||||
num_head_channels=None,
|
||||
num_groups=32,
|
||||
rescale_output_factor=1.0,
|
||||
eps=1e-5,
|
||||
):
|
||||
super().__init__()
|
||||
self.channels = channels
|
||||
|
||||
self.num_heads = channels // num_head_channels if num_head_channels is not None else 1
|
||||
self.num_head_size = num_head_channels
|
||||
self.group_norm = nn.GroupNorm(num_channels=channels, num_groups=num_groups, eps=eps, affine=True)
|
||||
|
||||
# define q,k,v as linear layers
|
||||
self.query = nn.Linear(channels, channels)
|
||||
self.key = nn.Linear(channels, channels)
|
||||
self.value = nn.Linear(channels, channels)
|
||||
|
||||
self.rescale_output_factor = rescale_output_factor
|
||||
self.proj_attn = nn.Linear(channels, channels, 1)
|
||||
|
||||
def transpose_for_scores(self, projection: torch.Tensor) -> torch.Tensor:
|
||||
new_projection_shape = projection.size()[:-1] + (self.num_heads, -1)
|
||||
# move heads to 2nd position (B, T, H * D) -> (B, T, H, D) -> (B, H, T, D)
|
||||
new_projection = projection.view(new_projection_shape).permute(0, 2, 1, 3)
|
||||
return new_projection
|
||||
|
||||
def forward(self, hidden_states):
|
||||
residual = hidden_states
|
||||
batch, channel, height, width = hidden_states.shape
|
||||
|
||||
# norm
|
||||
hidden_states = self.group_norm(hidden_states)
|
||||
|
||||
hidden_states = hidden_states.view(batch, channel, height * width).transpose(1, 2)
|
||||
|
||||
# proj to q, k, v
|
||||
query_proj = self.query(hidden_states)
|
||||
key_proj = self.key(hidden_states)
|
||||
value_proj = self.value(hidden_states)
|
||||
|
||||
# transpose
|
||||
query_states = self.transpose_for_scores(query_proj)
|
||||
key_states = self.transpose_for_scores(key_proj)
|
||||
value_states = self.transpose_for_scores(value_proj)
|
||||
|
||||
# get scores
|
||||
scale = 1 / math.sqrt(math.sqrt(self.channels / self.num_heads))
|
||||
attention_scores = torch.matmul(query_states * scale, key_states.transpose(-1, -2) * scale)
|
||||
attention_probs = torch.softmax(attention_scores.float(), dim=-1).type(attention_scores.dtype)
|
||||
|
||||
# compute attention output
|
||||
context_states = torch.matmul(attention_probs, value_states)
|
||||
|
||||
context_states = context_states.permute(0, 2, 1, 3).contiguous()
|
||||
new_context_states_shape = context_states.size()[:-2] + (self.channels,)
|
||||
context_states = context_states.view(new_context_states_shape)
|
||||
|
||||
# compute next hidden_states
|
||||
hidden_states = self.proj_attn(context_states)
|
||||
hidden_states = hidden_states.transpose(-1, -2).reshape(batch, channel, height, width)
|
||||
|
||||
# res connect and rescale
|
||||
hidden_states = (hidden_states + residual) / self.rescale_output_factor
|
||||
return hidden_states
|
||||
|
||||
def set_weight(self, attn_layer):
|
||||
self.group_norm.weight.data = attn_layer.norm.weight.data
|
||||
self.group_norm.bias.data = attn_layer.norm.bias.data
|
||||
|
||||
if hasattr(attn_layer, "q"):
|
||||
self.query.weight.data = attn_layer.q.weight.data[:, :, 0, 0]
|
||||
self.key.weight.data = attn_layer.k.weight.data[:, :, 0, 0]
|
||||
self.value.weight.data = attn_layer.v.weight.data[:, :, 0, 0]
|
||||
|
||||
self.query.bias.data = attn_layer.q.bias.data
|
||||
self.key.bias.data = attn_layer.k.bias.data
|
||||
self.value.bias.data = attn_layer.v.bias.data
|
||||
|
||||
self.proj_attn.weight.data = attn_layer.proj_out.weight.data[:, :, 0, 0]
|
||||
self.proj_attn.bias.data = attn_layer.proj_out.bias.data
|
||||
elif hasattr(attn_layer, "NIN_0"):
|
||||
self.query.weight.data = attn_layer.NIN_0.W.data.T
|
||||
self.key.weight.data = attn_layer.NIN_1.W.data.T
|
||||
self.value.weight.data = attn_layer.NIN_2.W.data.T
|
||||
|
||||
self.query.bias.data = attn_layer.NIN_0.b.data
|
||||
self.key.bias.data = attn_layer.NIN_1.b.data
|
||||
self.value.bias.data = attn_layer.NIN_2.b.data
|
||||
|
||||
self.proj_attn.weight.data = attn_layer.NIN_3.W.data.T
|
||||
self.proj_attn.bias.data = attn_layer.NIN_3.b.data
|
||||
|
||||
self.group_norm.weight.data = attn_layer.GroupNorm_0.weight.data
|
||||
self.group_norm.bias.data = attn_layer.GroupNorm_0.bias.data
|
||||
else:
|
||||
qkv_weight = attn_layer.qkv.weight.data.reshape(
|
||||
self.num_heads, 3 * self.channels // self.num_heads, self.channels
|
||||
)
|
||||
qkv_bias = attn_layer.qkv.bias.data.reshape(self.num_heads, 3 * self.channels // self.num_heads)
|
||||
|
||||
q_w, k_w, v_w = qkv_weight.split(self.channels // self.num_heads, dim=1)
|
||||
q_b, k_b, v_b = qkv_bias.split(self.channels // self.num_heads, dim=1)
|
||||
|
||||
self.query.weight.data = q_w.reshape(-1, self.channels)
|
||||
self.key.weight.data = k_w.reshape(-1, self.channels)
|
||||
self.value.weight.data = v_w.reshape(-1, self.channels)
|
||||
|
||||
self.query.bias.data = q_b.reshape(-1)
|
||||
self.key.bias.data = k_b.reshape(-1)
|
||||
self.value.bias.data = v_b.reshape(-1)
|
||||
|
||||
self.proj_attn.weight.data = attn_layer.proj.weight.data[:, :, 0]
|
||||
self.proj_attn.bias.data = attn_layer.proj.bias.data
|
||||
|
||||
|
||||
class SpatialTransformer(nn.Module):
|
||||
"""
|
||||
Transformer block for image-like data. First, project the input (aka embedding) and reshape to b, t, d. Then apply
|
||||
standard transformer action. Finally, reshape to image
|
||||
"""
|
||||
|
||||
def __init__(self, in_channels, n_heads, d_head, depth=1, dropout=0.0, context_dim=None):
|
||||
super().__init__()
|
||||
self.n_heads = n_heads
|
||||
self.d_head = d_head
|
||||
self.in_channels = in_channels
|
||||
inner_dim = n_heads * d_head
|
||||
self.norm = torch.nn.GroupNorm(num_groups=32, num_channels=in_channels, eps=1e-6, affine=True)
|
||||
|
||||
self.proj_in = nn.Conv2d(in_channels, inner_dim, kernel_size=1, stride=1, padding=0)
|
||||
|
||||
self.transformer_blocks = nn.ModuleList(
|
||||
[
|
||||
BasicTransformerBlock(inner_dim, n_heads, d_head, dropout=dropout, context_dim=context_dim)
|
||||
for d in range(depth)
|
||||
]
|
||||
)
|
||||
|
||||
self.proj_out = nn.Conv2d(inner_dim, in_channels, kernel_size=1, stride=1, padding=0)
|
||||
|
||||
def forward(self, x, context=None):
|
||||
# note: if no context is given, cross-attention defaults to self-attention
|
||||
b, c, h, w = x.shape
|
||||
x_in = x
|
||||
x = self.norm(x)
|
||||
x = self.proj_in(x)
|
||||
x = x.permute(0, 2, 3, 1).reshape(b, h * w, c)
|
||||
for block in self.transformer_blocks:
|
||||
x = block(x, context=context)
|
||||
x = x.reshape(b, h, w, c).permute(0, 3, 1, 2)
|
||||
x = self.proj_out(x)
|
||||
return x + x_in
|
||||
|
||||
def set_weight(self, layer):
|
||||
self.norm = layer.norm
|
||||
self.proj_in = layer.proj_in
|
||||
self.transformer_blocks = layer.transformer_blocks
|
||||
self.proj_out = layer.proj_out
|
||||
|
||||
|
||||
class BasicTransformerBlock(nn.Module):
|
||||
def __init__(self, dim, n_heads, d_head, dropout=0.0, context_dim=None, gated_ff=True, checkpoint=True):
|
||||
super().__init__()
|
||||
self.attn1 = CrossAttention(
|
||||
query_dim=dim, heads=n_heads, dim_head=d_head, dropout=dropout
|
||||
) # is a self-attention
|
||||
self.ff = FeedForward(dim, dropout=dropout, glu=gated_ff)
|
||||
self.attn2 = CrossAttention(
|
||||
query_dim=dim, context_dim=context_dim, heads=n_heads, dim_head=d_head, dropout=dropout
|
||||
) # is self-attn if context is none
|
||||
self.norm1 = nn.LayerNorm(dim)
|
||||
self.norm2 = nn.LayerNorm(dim)
|
||||
self.norm3 = nn.LayerNorm(dim)
|
||||
self.checkpoint = checkpoint
|
||||
|
||||
def forward(self, x, context=None):
|
||||
x = self.attn1(self.norm1(x)) + x
|
||||
x = self.attn2(self.norm2(x), context=context) + x
|
||||
x = self.ff(self.norm3(x)) + x
|
||||
return x
|
||||
|
||||
|
||||
class CrossAttention(nn.Module):
|
||||
def __init__(self, query_dim, context_dim=None, heads=8, dim_head=64, dropout=0.0):
|
||||
super().__init__()
|
||||
inner_dim = dim_head * heads
|
||||
context_dim = default(context_dim, query_dim)
|
||||
|
||||
self.scale = dim_head**-0.5
|
||||
self.heads = heads
|
||||
|
||||
self.to_q = nn.Linear(query_dim, inner_dim, bias=False)
|
||||
self.to_k = nn.Linear(context_dim, inner_dim, bias=False)
|
||||
self.to_v = nn.Linear(context_dim, inner_dim, bias=False)
|
||||
|
||||
self.to_out = nn.Sequential(nn.Linear(inner_dim, query_dim), nn.Dropout(dropout))
|
||||
|
||||
def reshape_heads_to_batch_dim(self, tensor):
|
||||
batch_size, seq_len, dim = tensor.shape
|
||||
head_size = self.heads
|
||||
tensor = tensor.reshape(batch_size, seq_len, head_size, dim // head_size)
|
||||
tensor = tensor.permute(0, 2, 1, 3).reshape(batch_size * head_size, seq_len, dim // head_size)
|
||||
return tensor
|
||||
|
||||
def reshape_batch_dim_to_heads(self, tensor):
|
||||
batch_size, seq_len, dim = tensor.shape
|
||||
head_size = self.heads
|
||||
tensor = tensor.reshape(batch_size // head_size, head_size, seq_len, dim)
|
||||
tensor = tensor.permute(0, 2, 1, 3).reshape(batch_size // head_size, seq_len, dim * head_size)
|
||||
return tensor
|
||||
|
||||
def forward(self, x, context=None, mask=None):
|
||||
batch_size, sequence_length, dim = x.shape
|
||||
|
||||
h = self.heads
|
||||
|
||||
q = self.to_q(x)
|
||||
context = default(context, x)
|
||||
k = self.to_k(context)
|
||||
v = self.to_v(context)
|
||||
|
||||
q = self.reshape_heads_to_batch_dim(q)
|
||||
k = self.reshape_heads_to_batch_dim(k)
|
||||
v = self.reshape_heads_to_batch_dim(v)
|
||||
|
||||
sim = torch.einsum("b i d, b j d -> b i j", q, k) * self.scale
|
||||
|
||||
if exists(mask):
|
||||
mask = mask.reshape(batch_size, -1)
|
||||
max_neg_value = -torch.finfo(sim.dtype).max
|
||||
mask = mask[:, None, :].repeat(h, 1, 1)
|
||||
sim.masked_fill_(~mask, max_neg_value)
|
||||
|
||||
# attention, what we cannot get enough of
|
||||
attn = sim.softmax(dim=-1)
|
||||
|
||||
out = torch.einsum("b i j, b j d -> b i d", attn, v)
|
||||
out = self.reshape_batch_dim_to_heads(out)
|
||||
return self.to_out(out)
|
||||
|
||||
|
||||
class FeedForward(nn.Module):
|
||||
def __init__(self, dim, dim_out=None, mult=4, glu=False, dropout=0.0):
|
||||
super().__init__()
|
||||
inner_dim = int(dim * mult)
|
||||
dim_out = default(dim_out, dim)
|
||||
project_in = nn.Sequential(nn.Linear(dim, inner_dim), nn.GELU()) if not glu else GEGLU(dim, inner_dim)
|
||||
|
||||
self.net = nn.Sequential(project_in, nn.Dropout(dropout), nn.Linear(inner_dim, dim_out))
|
||||
|
||||
def forward(self, x):
|
||||
return self.net(x)
|
||||
|
||||
|
||||
# feedforward
|
||||
class GEGLU(nn.Module):
|
||||
def __init__(self, dim_in, dim_out):
|
||||
super().__init__()
|
||||
self.proj = nn.Linear(dim_in, dim_out * 2)
|
||||
|
||||
def forward(self, x):
|
||||
x, gate = self.proj(x).chunk(2, dim=-1)
|
||||
return x * F.gelu(gate)
|
||||
|
||||
|
||||
# TODO(Patrick) - remove once all weights have been converted -> not needed anymore then
|
||||
class NIN(nn.Module):
|
||||
def __init__(self, in_dim, num_units, init_scale=0.1):
|
||||
super().__init__()
|
||||
self.W = nn.Parameter(torch.zeros(in_dim, num_units), requires_grad=True)
|
||||
self.b = nn.Parameter(torch.zeros(num_units), requires_grad=True)
|
||||
|
||||
|
||||
def exists(val):
|
||||
return val is not None
|
||||
|
||||
|
||||
def default(val, d):
|
||||
if exists(val):
|
||||
return val
|
||||
return d() if isfunction(d) else d
|
||||
|
||||
|
||||
# the main attention block that is used for all models
|
||||
class AttentionBlock(nn.Module):
|
||||
"""
|
||||
An attention block that allows spatial positions to attend to each other.
|
||||
|
||||
Originally ported from here, but adapted to the N-d case.
|
||||
https://github.com/hojonathanho/diffusion/blob/1e0dceb3b3495bbe19116a5e1b3596cd0706c543/diffusion_tf/models/unet.py#L66.
|
||||
"""
|
||||
|
||||
def __init__(
|
||||
self,
|
||||
channels,
|
||||
num_heads=1,
|
||||
num_head_channels=None,
|
||||
num_groups=32,
|
||||
encoder_channels=None,
|
||||
overwrite_qkv=False,
|
||||
overwrite_linear=False,
|
||||
rescale_output_factor=1.0,
|
||||
eps=1e-5,
|
||||
):
|
||||
super().__init__()
|
||||
self.channels = channels
|
||||
if num_head_channels is None:
|
||||
self.num_heads = num_heads
|
||||
else:
|
||||
assert (
|
||||
channels % num_head_channels == 0
|
||||
), f"q,k,v channels {channels} is not divisible by num_head_channels {num_head_channels}"
|
||||
self.num_heads = channels // num_head_channels
|
||||
|
||||
self.norm = nn.GroupNorm(num_channels=channels, num_groups=num_groups, eps=eps, affine=True)
|
||||
self.qkv = nn.Conv1d(channels, channels * 3, 1)
|
||||
self.n_heads = self.num_heads
|
||||
self.rescale_output_factor = rescale_output_factor
|
||||
|
||||
if encoder_channels is not None:
|
||||
self.encoder_kv = nn.Conv1d(encoder_channels, channels * 2, 1)
|
||||
|
||||
self.proj = nn.Conv1d(channels, channels, 1)
|
||||
|
||||
self.overwrite_qkv = overwrite_qkv
|
||||
self.overwrite_linear = overwrite_linear
|
||||
|
||||
if overwrite_qkv:
|
||||
in_channels = channels
|
||||
self.norm = nn.GroupNorm(num_channels=channels, num_groups=num_groups, eps=1e-6)
|
||||
self.q = torch.nn.Conv2d(in_channels, in_channels, kernel_size=1, stride=1, padding=0)
|
||||
self.k = torch.nn.Conv2d(in_channels, in_channels, kernel_size=1, stride=1, padding=0)
|
||||
self.v = torch.nn.Conv2d(in_channels, in_channels, kernel_size=1, stride=1, padding=0)
|
||||
self.proj_out = torch.nn.Conv2d(in_channels, in_channels, kernel_size=1, stride=1, padding=0)
|
||||
elif self.overwrite_linear:
|
||||
num_groups = min(channels // 4, 32)
|
||||
self.norm = nn.GroupNorm(num_channels=channels, num_groups=num_groups, eps=1e-6)
|
||||
self.NIN_0 = NIN(channels, channels)
|
||||
self.NIN_1 = NIN(channels, channels)
|
||||
self.NIN_2 = NIN(channels, channels)
|
||||
self.NIN_3 = NIN(channels, channels)
|
||||
|
||||
self.GroupNorm_0 = nn.GroupNorm(num_groups=num_groups, num_channels=channels, eps=1e-6)
|
||||
else:
|
||||
self.proj_out = nn.Conv1d(channels, channels, 1)
|
||||
self.set_weights(self)
|
||||
|
||||
self.is_overwritten = False
|
||||
|
||||
def set_weights(self, module):
|
||||
if self.overwrite_qkv:
|
||||
qkv_weight = torch.cat([module.q.weight.data, module.k.weight.data, module.v.weight.data], dim=0)[
|
||||
:, :, :, 0
|
||||
]
|
||||
qkv_bias = torch.cat([module.q.bias.data, module.k.bias.data, module.v.bias.data], dim=0)
|
||||
|
||||
self.qkv.weight.data = qkv_weight
|
||||
self.qkv.bias.data = qkv_bias
|
||||
|
||||
proj_out = nn.Conv1d(self.channels, self.channels, 1)
|
||||
proj_out.weight.data = module.proj_out.weight.data[:, :, :, 0]
|
||||
proj_out.bias.data = module.proj_out.bias.data
|
||||
|
||||
self.proj = proj_out
|
||||
elif self.overwrite_linear:
|
||||
self.qkv.weight.data = torch.concat(
|
||||
[self.NIN_0.W.data.T, self.NIN_1.W.data.T, self.NIN_2.W.data.T], dim=0
|
||||
)[:, :, None]
|
||||
self.qkv.bias.data = torch.concat([self.NIN_0.b.data, self.NIN_1.b.data, self.NIN_2.b.data], dim=0)
|
||||
|
||||
self.proj.weight.data = self.NIN_3.W.data.T[:, :, None]
|
||||
self.proj.bias.data = self.NIN_3.b.data
|
||||
|
||||
self.norm.weight.data = self.GroupNorm_0.weight.data
|
||||
self.norm.bias.data = self.GroupNorm_0.bias.data
|
||||
else:
|
||||
self.proj.weight.data = self.proj_out.weight.data
|
||||
self.proj.bias.data = self.proj_out.bias.data
|
||||
|
||||
def forward(self, x, encoder_out=None):
|
||||
if not self.is_overwritten and (self.overwrite_qkv or self.overwrite_linear):
|
||||
self.set_weights(self)
|
||||
self.is_overwritten = True
|
||||
|
||||
b, c, *spatial = x.shape
|
||||
hid_states = self.norm(x).view(b, c, -1)
|
||||
|
||||
qkv = self.qkv(hid_states)
|
||||
bs, width, length = qkv.shape
|
||||
assert width % (3 * self.n_heads) == 0
|
||||
ch = width // (3 * self.n_heads)
|
||||
q, k, v = qkv.reshape(bs * self.n_heads, ch * 3, length).split(ch, dim=1)
|
||||
|
||||
if encoder_out is not None:
|
||||
encoder_kv = self.encoder_kv(encoder_out)
|
||||
assert encoder_kv.shape[1] == self.n_heads * ch * 2
|
||||
ek, ev = encoder_kv.reshape(bs * self.n_heads, ch * 2, -1).split(ch, dim=1)
|
||||
k = torch.cat([ek, k], dim=-1)
|
||||
v = torch.cat([ev, v], dim=-1)
|
||||
|
||||
scale = 1 / math.sqrt(math.sqrt(ch))
|
||||
weight = torch.einsum("bct,bcs->bts", q * scale, k * scale) # More stable with f16 than dividing afterwards
|
||||
weight = torch.softmax(weight.float(), dim=-1).type(weight.dtype)
|
||||
|
||||
a = torch.einsum("bts,bcs->bct", weight, v)
|
||||
h = a.reshape(bs, -1, length)
|
||||
|
||||
h = self.proj(h)
|
||||
h = h.reshape(b, c, *spatial)
|
||||
|
||||
result = x + h
|
||||
|
||||
result = result / self.rescale_output_factor
|
||||
|
||||
return result
|
||||
@@ -1,110 +0,0 @@
|
||||
# Copyright 2022 The HuggingFace Team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
import math
|
||||
|
||||
import numpy as np
|
||||
import torch
|
||||
from torch import nn
|
||||
|
||||
|
||||
def get_timestep_embedding(
|
||||
timesteps, embedding_dim, flip_sin_to_cos=False, downscale_freq_shift=1, scale=1, max_period=10000
|
||||
):
|
||||
"""
|
||||
This matches the implementation in Denoising Diffusion Probabilistic Models: Create sinusoidal timestep embeddings.
|
||||
|
||||
:param timesteps: a 1-D Tensor of N indices, one per batch element.
|
||||
These may be fractional.
|
||||
:param embedding_dim: the dimension of the output. :param max_period: controls the minimum frequency of the
|
||||
embeddings. :return: an [N x dim] Tensor of positional embeddings.
|
||||
"""
|
||||
assert len(timesteps.shape) == 1, "Timesteps should be a 1d-array"
|
||||
|
||||
half_dim = embedding_dim // 2
|
||||
|
||||
emb_coeff = -math.log(max_period) / (half_dim - downscale_freq_shift)
|
||||
emb = torch.arange(half_dim, dtype=torch.float32, device=timesteps.device)
|
||||
emb = torch.exp(emb * emb_coeff)
|
||||
emb = timesteps[:, None].float() * emb[None, :]
|
||||
|
||||
# scale embeddings
|
||||
emb = scale * emb
|
||||
|
||||
# concat sine and cosine embeddings
|
||||
emb = torch.cat([torch.sin(emb), torch.cos(emb)], dim=-1)
|
||||
|
||||
# flip sine and cosine embeddings
|
||||
if flip_sin_to_cos:
|
||||
emb = torch.cat([emb[:, half_dim:], emb[:, :half_dim]], dim=-1)
|
||||
|
||||
# zero pad
|
||||
if embedding_dim % 2 == 1:
|
||||
emb = torch.nn.functional.pad(emb, (0, 1, 0, 0))
|
||||
return emb
|
||||
|
||||
|
||||
class TimestepEmbedding(nn.Module):
|
||||
def __init__(self, channel, time_embed_dim, act_fn="silu"):
|
||||
super().__init__()
|
||||
|
||||
self.linear_1 = nn.Linear(channel, time_embed_dim)
|
||||
self.act = None
|
||||
if act_fn == "silu":
|
||||
self.act = nn.SiLU()
|
||||
self.linear_2 = nn.Linear(time_embed_dim, time_embed_dim)
|
||||
|
||||
def forward(self, sample):
|
||||
sample = self.linear_1(sample)
|
||||
|
||||
if self.act is not None:
|
||||
sample = self.act(sample)
|
||||
|
||||
sample = self.linear_2(sample)
|
||||
return sample
|
||||
|
||||
|
||||
class Timesteps(nn.Module):
|
||||
def __init__(self, num_channels, flip_sin_to_cos, downscale_freq_shift):
|
||||
super().__init__()
|
||||
self.num_channels = num_channels
|
||||
self.flip_sin_to_cos = flip_sin_to_cos
|
||||
self.downscale_freq_shift = downscale_freq_shift
|
||||
|
||||
def forward(self, timesteps):
|
||||
t_emb = get_timestep_embedding(
|
||||
timesteps,
|
||||
self.num_channels,
|
||||
flip_sin_to_cos=self.flip_sin_to_cos,
|
||||
downscale_freq_shift=self.downscale_freq_shift,
|
||||
)
|
||||
return t_emb
|
||||
|
||||
|
||||
class GaussianFourierProjection(nn.Module):
|
||||
"""Gaussian Fourier embeddings for noise levels."""
|
||||
|
||||
def __init__(self, embedding_size=256, scale=1.0):
|
||||
super().__init__()
|
||||
self.weight = nn.Parameter(torch.randn(embedding_size) * scale, requires_grad=False)
|
||||
|
||||
# to delete later
|
||||
self.W = nn.Parameter(torch.randn(embedding_size) * scale, requires_grad=False)
|
||||
|
||||
self.weight = self.W
|
||||
|
||||
def forward(self, x):
|
||||
x = torch.log(x)
|
||||
x_proj = x[:, None] * self.weight[None, :] * 2 * np.pi
|
||||
out = torch.cat([torch.sin(x_proj), torch.cos(x_proj)], dim=-1)
|
||||
return out
|
||||
@@ -1,868 +0,0 @@
|
||||
from functools import partial
|
||||
|
||||
import numpy as np
|
||||
import torch
|
||||
import torch.nn as nn
|
||||
import torch.nn.functional as F
|
||||
|
||||
|
||||
class Upsample2D(nn.Module):
|
||||
"""
|
||||
An upsampling layer with an optional convolution.
|
||||
|
||||
:param channels: channels in the inputs and outputs. :param use_conv: a bool determining if a convolution is
|
||||
applied. :param dims: determines if the signal is 1D, 2D, or 3D. If 3D, then
|
||||
upsampling occurs in the inner-two dimensions.
|
||||
"""
|
||||
|
||||
def __init__(self, channels, use_conv=False, use_conv_transpose=False, out_channels=None, name="conv"):
|
||||
super().__init__()
|
||||
self.channels = channels
|
||||
self.out_channels = out_channels or channels
|
||||
self.use_conv = use_conv
|
||||
self.use_conv_transpose = use_conv_transpose
|
||||
self.name = name
|
||||
|
||||
conv = None
|
||||
if use_conv_transpose:
|
||||
conv = nn.ConvTranspose2d(channels, self.out_channels, 4, 2, 1)
|
||||
elif use_conv:
|
||||
conv = nn.Conv2d(self.channels, self.out_channels, 3, padding=1)
|
||||
|
||||
# TODO(Suraj, Patrick) - clean up after weight dicts are correctly renamed
|
||||
if name == "conv":
|
||||
self.conv = conv
|
||||
else:
|
||||
self.Conv2d_0 = conv
|
||||
|
||||
def forward(self, x):
|
||||
assert x.shape[1] == self.channels
|
||||
if self.use_conv_transpose:
|
||||
return self.conv(x)
|
||||
|
||||
x = F.interpolate(x, scale_factor=2.0, mode="nearest")
|
||||
|
||||
# TODO(Suraj, Patrick) - clean up after weight dicts are correctly renamed
|
||||
if self.use_conv:
|
||||
if self.name == "conv":
|
||||
x = self.conv(x)
|
||||
else:
|
||||
x = self.Conv2d_0(x)
|
||||
|
||||
return x
|
||||
|
||||
|
||||
class Downsample2D(nn.Module):
|
||||
"""
|
||||
A downsampling layer with an optional convolution.
|
||||
|
||||
:param channels: channels in the inputs and outputs. :param use_conv: a bool determining if a convolution is
|
||||
applied. :param dims: determines if the signal is 1D, 2D, or 3D. If 3D, then
|
||||
downsampling occurs in the inner-two dimensions.
|
||||
"""
|
||||
|
||||
def __init__(self, channels, use_conv=False, out_channels=None, padding=1, name="conv"):
|
||||
super().__init__()
|
||||
self.channels = channels
|
||||
self.out_channels = out_channels or channels
|
||||
self.use_conv = use_conv
|
||||
self.padding = padding
|
||||
stride = 2
|
||||
self.name = name
|
||||
|
||||
if use_conv:
|
||||
conv = nn.Conv2d(self.channels, self.out_channels, 3, stride=stride, padding=padding)
|
||||
else:
|
||||
assert self.channels == self.out_channels
|
||||
conv = nn.AvgPool2d(kernel_size=stride, stride=stride)
|
||||
|
||||
# TODO(Suraj, Patrick) - clean up after weight dicts are correctly renamed
|
||||
if name == "conv":
|
||||
self.Conv2d_0 = conv
|
||||
self.conv = conv
|
||||
elif name == "Conv2d_0":
|
||||
self.conv = conv
|
||||
else:
|
||||
self.conv = conv
|
||||
|
||||
def forward(self, x):
|
||||
assert x.shape[1] == self.channels
|
||||
if self.use_conv and self.padding == 0:
|
||||
pad = (0, 1, 0, 1)
|
||||
x = F.pad(x, pad, mode="constant", value=0)
|
||||
|
||||
assert x.shape[1] == self.channels
|
||||
x = self.conv(x)
|
||||
|
||||
return x
|
||||
|
||||
|
||||
class FirUpsample2D(nn.Module):
|
||||
def __init__(self, channels=None, out_channels=None, use_conv=False, fir_kernel=(1, 3, 3, 1)):
|
||||
super().__init__()
|
||||
out_channels = out_channels if out_channels else channels
|
||||
if use_conv:
|
||||
self.Conv2d_0 = nn.Conv2d(channels, out_channels, kernel_size=3, stride=1, padding=1)
|
||||
self.use_conv = use_conv
|
||||
self.fir_kernel = fir_kernel
|
||||
self.out_channels = out_channels
|
||||
|
||||
def _upsample_2d(self, x, w=None, k=None, factor=2, gain=1):
|
||||
"""Fused `upsample_2d()` followed by `Conv2d()`.
|
||||
|
||||
Args:
|
||||
Padding is performed only once at the beginning, not between the operations. The fused op is considerably more
|
||||
efficient than performing the same calculation using standard TensorFlow ops. It supports gradients of arbitrary:
|
||||
order.
|
||||
x: Input tensor of the shape `[N, C, H, W]` or `[N, H, W,
|
||||
C]`.
|
||||
w: Weight tensor of the shape `[filterH, filterW, inChannels,
|
||||
outChannels]`. Grouped convolution can be performed by `inChannels = x.shape[0] // numGroups`.
|
||||
k: FIR filter of the shape `[firH, firW]` or `[firN]`
|
||||
(separable). The default is `[1] * factor`, which corresponds to nearest-neighbor upsampling.
|
||||
factor: Integer upsampling factor (default: 2). gain: Scaling factor for signal magnitude (default: 1.0).
|
||||
|
||||
Returns:
|
||||
Tensor of the shape `[N, C, H * factor, W * factor]` or `[N, H * factor, W * factor, C]`, and same datatype as
|
||||
`x`.
|
||||
"""
|
||||
|
||||
assert isinstance(factor, int) and factor >= 1
|
||||
|
||||
# Setup filter kernel.
|
||||
if k is None:
|
||||
k = [1] * factor
|
||||
|
||||
# setup kernel
|
||||
k = np.asarray(k, dtype=np.float32)
|
||||
if k.ndim == 1:
|
||||
k = np.outer(k, k)
|
||||
k /= np.sum(k)
|
||||
|
||||
k = k * (gain * (factor**2))
|
||||
|
||||
if self.use_conv:
|
||||
convH = w.shape[2]
|
||||
convW = w.shape[3]
|
||||
inC = w.shape[1]
|
||||
|
||||
p = (k.shape[0] - factor) - (convW - 1)
|
||||
|
||||
stride = (factor, factor)
|
||||
# Determine data dimensions.
|
||||
stride = [1, 1, factor, factor]
|
||||
output_shape = ((x.shape[2] - 1) * factor + convH, (x.shape[3] - 1) * factor + convW)
|
||||
output_padding = (
|
||||
output_shape[0] - (x.shape[2] - 1) * stride[0] - convH,
|
||||
output_shape[1] - (x.shape[3] - 1) * stride[1] - convW,
|
||||
)
|
||||
assert output_padding[0] >= 0 and output_padding[1] >= 0
|
||||
inC = w.shape[1]
|
||||
num_groups = x.shape[1] // inC
|
||||
|
||||
# Transpose weights.
|
||||
w = torch.reshape(w, (num_groups, -1, inC, convH, convW))
|
||||
w = w[..., ::-1, ::-1].permute(0, 2, 1, 3, 4)
|
||||
w = torch.reshape(w, (num_groups * inC, -1, convH, convW))
|
||||
|
||||
x = F.conv_transpose2d(x, w, stride=stride, output_padding=output_padding, padding=0)
|
||||
|
||||
x = upfirdn2d_native(x, torch.tensor(k, device=x.device), pad=((p + 1) // 2 + factor - 1, p // 2 + 1))
|
||||
else:
|
||||
p = k.shape[0] - factor
|
||||
x = upfirdn2d_native(
|
||||
x, torch.tensor(k, device=x.device), up=factor, pad=((p + 1) // 2 + factor - 1, p // 2)
|
||||
)
|
||||
|
||||
return x
|
||||
|
||||
def forward(self, x):
|
||||
if self.use_conv:
|
||||
h = self._upsample_2d(x, self.Conv2d_0.weight, k=self.fir_kernel)
|
||||
h = h + self.Conv2d_0.bias.reshape(1, -1, 1, 1)
|
||||
else:
|
||||
h = self._upsample_2d(x, k=self.fir_kernel, factor=2)
|
||||
|
||||
return h
|
||||
|
||||
|
||||
class FirDownsample2D(nn.Module):
|
||||
def __init__(self, channels=None, out_channels=None, use_conv=False, fir_kernel=(1, 3, 3, 1)):
|
||||
super().__init__()
|
||||
out_channels = out_channels if out_channels else channels
|
||||
if use_conv:
|
||||
self.Conv2d_0 = nn.Conv2d(channels, out_channels, kernel_size=3, stride=1, padding=1)
|
||||
self.fir_kernel = fir_kernel
|
||||
self.use_conv = use_conv
|
||||
self.out_channels = out_channels
|
||||
|
||||
def _downsample_2d(self, x, w=None, k=None, factor=2, gain=1):
|
||||
"""Fused `Conv2d()` followed by `downsample_2d()`.
|
||||
|
||||
Args:
|
||||
Padding is performed only once at the beginning, not between the operations. The fused op is considerably more
|
||||
efficient than performing the same calculation using standard TensorFlow ops. It supports gradients of arbitrary:
|
||||
order.
|
||||
x: Input tensor of the shape `[N, C, H, W]` or `[N, H, W, C]`. w: Weight tensor of the shape `[filterH,
|
||||
filterW, inChannels, outChannels]`. Grouped convolution can be performed by `inChannels = x.shape[0] //
|
||||
numGroups`. k: FIR filter of the shape `[firH, firW]` or `[firN]` (separable). The default is `[1] *
|
||||
factor`, which corresponds to average pooling. factor: Integer downsampling factor (default: 2). gain:
|
||||
Scaling factor for signal magnitude (default: 1.0).
|
||||
|
||||
Returns:
|
||||
Tensor of the shape `[N, C, H // factor, W // factor]` or `[N, H // factor, W // factor, C]`, and same
|
||||
datatype as `x`.
|
||||
"""
|
||||
|
||||
assert isinstance(factor, int) and factor >= 1
|
||||
if k is None:
|
||||
k = [1] * factor
|
||||
|
||||
# setup kernel
|
||||
k = np.asarray(k, dtype=np.float32)
|
||||
if k.ndim == 1:
|
||||
k = np.outer(k, k)
|
||||
k /= np.sum(k)
|
||||
|
||||
k = k * gain
|
||||
|
||||
if self.use_conv:
|
||||
_, _, convH, convW = w.shape
|
||||
p = (k.shape[0] - factor) + (convW - 1)
|
||||
s = [factor, factor]
|
||||
x = upfirdn2d_native(x, torch.tensor(k, device=x.device), pad=((p + 1) // 2, p // 2))
|
||||
x = F.conv2d(x, w, stride=s, padding=0)
|
||||
else:
|
||||
p = k.shape[0] - factor
|
||||
x = upfirdn2d_native(x, torch.tensor(k, device=x.device), down=factor, pad=((p + 1) // 2, p // 2))
|
||||
|
||||
return x
|
||||
|
||||
def forward(self, x):
|
||||
if self.use_conv:
|
||||
x = self._downsample_2d(x, w=self.Conv2d_0.weight, k=self.fir_kernel)
|
||||
x = x + self.Conv2d_0.bias.reshape(1, -1, 1, 1)
|
||||
else:
|
||||
x = self._downsample_2d(x, k=self.fir_kernel, factor=2)
|
||||
|
||||
return x
|
||||
|
||||
|
||||
class ResnetBlock(nn.Module):
|
||||
def __init__(
|
||||
self,
|
||||
*,
|
||||
in_channels,
|
||||
out_channels=None,
|
||||
conv_shortcut=False,
|
||||
dropout=0.0,
|
||||
temb_channels=512,
|
||||
groups=32,
|
||||
groups_out=None,
|
||||
pre_norm=True,
|
||||
eps=1e-6,
|
||||
non_linearity="swish",
|
||||
time_embedding_norm="default",
|
||||
kernel=None,
|
||||
output_scale_factor=1.0,
|
||||
use_nin_shortcut=None,
|
||||
up=False,
|
||||
down=False,
|
||||
):
|
||||
super().__init__()
|
||||
self.pre_norm = pre_norm
|
||||
self.pre_norm = True
|
||||
self.in_channels = in_channels
|
||||
out_channels = in_channels if out_channels is None else out_channels
|
||||
self.out_channels = out_channels
|
||||
self.use_conv_shortcut = conv_shortcut
|
||||
self.time_embedding_norm = time_embedding_norm
|
||||
self.up = up
|
||||
self.down = down
|
||||
self.output_scale_factor = output_scale_factor
|
||||
|
||||
if groups_out is None:
|
||||
groups_out = groups
|
||||
|
||||
self.norm1 = torch.nn.GroupNorm(num_groups=groups, num_channels=in_channels, eps=eps, affine=True)
|
||||
|
||||
self.conv1 = torch.nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=1, padding=1)
|
||||
|
||||
self.time_emb_proj = torch.nn.Linear(temb_channels, out_channels)
|
||||
|
||||
self.norm2 = torch.nn.GroupNorm(num_groups=groups_out, num_channels=out_channels, eps=eps, affine=True)
|
||||
self.dropout = torch.nn.Dropout(dropout)
|
||||
self.conv2 = torch.nn.Conv2d(out_channels, out_channels, kernel_size=3, stride=1, padding=1)
|
||||
|
||||
if non_linearity == "swish":
|
||||
self.nonlinearity = lambda x: F.silu(x)
|
||||
elif non_linearity == "mish":
|
||||
self.nonlinearity = Mish()
|
||||
elif non_linearity == "silu":
|
||||
self.nonlinearity = nn.SiLU()
|
||||
|
||||
self.upsample = self.downsample = None
|
||||
if self.up:
|
||||
if kernel == "fir":
|
||||
fir_kernel = (1, 3, 3, 1)
|
||||
self.upsample = lambda x: upsample_2d(x, k=fir_kernel)
|
||||
elif kernel == "sde_vp":
|
||||
self.upsample = partial(F.interpolate, scale_factor=2.0, mode="nearest")
|
||||
else:
|
||||
self.upsample = Upsample2D(in_channels, use_conv=False)
|
||||
elif self.down:
|
||||
if kernel == "fir":
|
||||
fir_kernel = (1, 3, 3, 1)
|
||||
self.downsample = lambda x: downsample_2d(x, k=fir_kernel)
|
||||
elif kernel == "sde_vp":
|
||||
self.downsample = partial(F.avg_pool2d, kernel_size=2, stride=2)
|
||||
else:
|
||||
self.downsample = Downsample2D(in_channels, use_conv=False, padding=1, name="op")
|
||||
|
||||
self.use_nin_shortcut = self.in_channels != self.out_channels if use_nin_shortcut is None else use_nin_shortcut
|
||||
|
||||
self.conv_shortcut = None
|
||||
if self.use_nin_shortcut:
|
||||
self.conv_shortcut = torch.nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=1, padding=0)
|
||||
|
||||
def forward(self, x, temb, hey=False):
|
||||
h = x
|
||||
|
||||
h = self.norm1(h)
|
||||
h = self.nonlinearity(h)
|
||||
|
||||
if self.upsample is not None:
|
||||
x = self.upsample(x)
|
||||
h = self.upsample(h)
|
||||
elif self.downsample is not None:
|
||||
x = self.downsample(x)
|
||||
h = self.downsample(h)
|
||||
|
||||
h = self.conv1(h)
|
||||
|
||||
if temb is not None:
|
||||
temb = self.time_emb_proj(self.nonlinearity(temb))[:, :, None, None]
|
||||
h = h + temb
|
||||
|
||||
h = self.norm2(h)
|
||||
h = self.nonlinearity(h)
|
||||
|
||||
h = self.dropout(h)
|
||||
h = self.conv2(h)
|
||||
|
||||
if self.conv_shortcut is not None:
|
||||
x = self.conv_shortcut(x)
|
||||
|
||||
out = (x + h) / self.output_scale_factor
|
||||
|
||||
return out
|
||||
|
||||
def set_weight(self, resnet):
|
||||
self.norm1.weight.data = resnet.norm1.weight.data
|
||||
self.norm1.bias.data = resnet.norm1.bias.data
|
||||
|
||||
self.conv1.weight.data = resnet.conv1.weight.data
|
||||
self.conv1.bias.data = resnet.conv1.bias.data
|
||||
|
||||
self.time_emb_proj.weight.data = resnet.temb_proj.weight.data
|
||||
self.time_emb_proj.bias.data = resnet.temb_proj.bias.data
|
||||
|
||||
self.norm2.weight.data = resnet.norm2.weight.data
|
||||
self.norm2.bias.data = resnet.norm2.bias.data
|
||||
|
||||
self.conv2.weight.data = resnet.conv2.weight.data
|
||||
self.conv2.bias.data = resnet.conv2.bias.data
|
||||
|
||||
if self.use_nin_shortcut:
|
||||
self.conv_shortcut.weight.data = resnet.nin_shortcut.weight.data
|
||||
self.conv_shortcut.bias.data = resnet.nin_shortcut.bias.data
|
||||
|
||||
|
||||
# THE FOLLOWING SHOULD BE DELETED ONCE ALL CHECKPOITNS ARE CONVERTED
|
||||
|
||||
# unet.py, unet_grad_tts.py, unet_ldm.py, unet_glide.py, unet_score_vde.py
|
||||
# => All 2D-Resnets are included here now!
|
||||
class ResnetBlock2D(nn.Module):
|
||||
def __init__(
|
||||
self,
|
||||
*,
|
||||
in_channels,
|
||||
out_channels=None,
|
||||
conv_shortcut=False,
|
||||
dropout=0.0,
|
||||
temb_channels=512,
|
||||
groups=32,
|
||||
groups_out=None,
|
||||
pre_norm=True,
|
||||
eps=1e-6,
|
||||
non_linearity="swish",
|
||||
time_embedding_norm="default",
|
||||
kernel=None,
|
||||
output_scale_factor=1.0,
|
||||
use_nin_shortcut=None,
|
||||
up=False,
|
||||
down=False,
|
||||
overwrite_for_grad_tts=False,
|
||||
overwrite_for_ldm=False,
|
||||
overwrite_for_glide=False,
|
||||
overwrite_for_score_vde=False,
|
||||
):
|
||||
super().__init__()
|
||||
self.pre_norm = pre_norm
|
||||
self.in_channels = in_channels
|
||||
out_channels = in_channels if out_channels is None else out_channels
|
||||
self.out_channels = out_channels
|
||||
self.use_conv_shortcut = conv_shortcut
|
||||
self.time_embedding_norm = time_embedding_norm
|
||||
self.up = up
|
||||
self.down = down
|
||||
self.output_scale_factor = output_scale_factor
|
||||
|
||||
if groups_out is None:
|
||||
groups_out = groups
|
||||
|
||||
if self.pre_norm:
|
||||
self.norm1 = torch.nn.GroupNorm(num_groups=groups, num_channels=in_channels, eps=eps, affine=True)
|
||||
else:
|
||||
self.norm1 = torch.nn.GroupNorm(num_groups=groups, num_channels=out_channels, eps=eps, affine=True)
|
||||
|
||||
self.conv1 = torch.nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=1, padding=1)
|
||||
|
||||
if time_embedding_norm == "default" and temb_channels > 0:
|
||||
self.temb_proj = torch.nn.Linear(temb_channels, out_channels)
|
||||
elif time_embedding_norm == "scale_shift" and temb_channels > 0:
|
||||
self.temb_proj = torch.nn.Linear(temb_channels, 2 * out_channels)
|
||||
|
||||
self.norm2 = torch.nn.GroupNorm(num_groups=groups_out, num_channels=out_channels, eps=eps, affine=True)
|
||||
self.dropout = torch.nn.Dropout(dropout)
|
||||
self.conv2 = torch.nn.Conv2d(out_channels, out_channels, kernel_size=3, stride=1, padding=1)
|
||||
|
||||
if non_linearity == "swish":
|
||||
self.nonlinearity = lambda x: F.silu(x)
|
||||
elif non_linearity == "mish":
|
||||
self.nonlinearity = Mish()
|
||||
elif non_linearity == "silu":
|
||||
self.nonlinearity = nn.SiLU()
|
||||
|
||||
self.upsample = self.downsample = None
|
||||
if self.up:
|
||||
if kernel == "fir":
|
||||
fir_kernel = (1, 3, 3, 1)
|
||||
self.upsample = lambda x: upsample_2d(x, k=fir_kernel)
|
||||
elif kernel == "sde_vp":
|
||||
self.upsample = partial(F.interpolate, scale_factor=2.0, mode="nearest")
|
||||
else:
|
||||
self.upsample = Upsample2D(in_channels, use_conv=False)
|
||||
elif self.down:
|
||||
if kernel == "fir":
|
||||
fir_kernel = (1, 3, 3, 1)
|
||||
self.downsample = lambda x: downsample_2d(x, k=fir_kernel)
|
||||
elif kernel == "sde_vp":
|
||||
self.downsample = partial(F.avg_pool2d, kernel_size=2, stride=2)
|
||||
else:
|
||||
self.downsample = Downsample2D(in_channels, use_conv=False, padding=1, name="op")
|
||||
|
||||
self.use_nin_shortcut = self.in_channels != self.out_channels if use_nin_shortcut is None else use_nin_shortcut
|
||||
|
||||
self.nin_shortcut = None
|
||||
if self.use_nin_shortcut:
|
||||
self.nin_shortcut = torch.nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=1, padding=0)
|
||||
|
||||
# TODO(SURAJ, PATRICK): ALL OF THE FOLLOWING OF THE INIT METHOD CAN BE DELETED ONCE WEIGHTS ARE CONVERTED
|
||||
self.is_overwritten = False
|
||||
self.overwrite_for_glide = overwrite_for_glide
|
||||
self.overwrite_for_grad_tts = overwrite_for_grad_tts
|
||||
self.overwrite_for_ldm = overwrite_for_ldm or overwrite_for_glide
|
||||
self.overwrite_for_score_vde = overwrite_for_score_vde
|
||||
if self.overwrite_for_grad_tts:
|
||||
dim = in_channels
|
||||
dim_out = out_channels
|
||||
time_emb_dim = temb_channels
|
||||
self.mlp = torch.nn.Sequential(Mish(), torch.nn.Linear(time_emb_dim, dim_out))
|
||||
self.pre_norm = pre_norm
|
||||
|
||||
self.block1 = Block(dim, dim_out, groups=groups)
|
||||
self.block2 = Block(dim_out, dim_out, groups=groups)
|
||||
if dim != dim_out:
|
||||
self.res_conv = torch.nn.Conv2d(dim, dim_out, 1)
|
||||
else:
|
||||
self.res_conv = torch.nn.Identity()
|
||||
elif self.overwrite_for_ldm:
|
||||
channels = in_channels
|
||||
emb_channels = temb_channels
|
||||
use_scale_shift_norm = False
|
||||
non_linearity = "silu"
|
||||
|
||||
self.in_layers = nn.Sequential(
|
||||
normalization(channels, swish=1.0),
|
||||
nn.Identity(),
|
||||
nn.Conv2d(channels, self.out_channels, 3, padding=1),
|
||||
)
|
||||
self.emb_layers = nn.Sequential(
|
||||
nn.SiLU(),
|
||||
linear(
|
||||
emb_channels,
|
||||
2 * self.out_channels if self.time_embedding_norm == "scale_shift" else self.out_channels,
|
||||
),
|
||||
)
|
||||
self.out_layers = nn.Sequential(
|
||||
normalization(self.out_channels, swish=0.0 if use_scale_shift_norm else 1.0),
|
||||
nn.SiLU() if use_scale_shift_norm else nn.Identity(),
|
||||
nn.Dropout(p=dropout),
|
||||
zero_module(nn.Conv2d(self.out_channels, self.out_channels, 3, padding=1)),
|
||||
)
|
||||
if self.out_channels == in_channels:
|
||||
self.skip_connection = nn.Identity()
|
||||
else:
|
||||
self.skip_connection = nn.Conv2d(channels, self.out_channels, 1)
|
||||
self.set_weights_ldm()
|
||||
elif self.overwrite_for_score_vde:
|
||||
in_ch = in_channels
|
||||
out_ch = out_channels
|
||||
|
||||
eps = 1e-6
|
||||
num_groups = min(in_ch // 4, 32)
|
||||
num_groups_out = min(out_ch // 4, 32)
|
||||
temb_dim = temb_channels
|
||||
|
||||
self.GroupNorm_0 = nn.GroupNorm(num_groups=num_groups, num_channels=in_ch, eps=eps)
|
||||
self.up = up
|
||||
self.down = down
|
||||
self.Conv_0 = nn.Conv2d(in_ch, out_ch, kernel_size=3, padding=1)
|
||||
if temb_dim is not None:
|
||||
self.Dense_0 = nn.Linear(temb_dim, out_ch)
|
||||
nn.init.zeros_(self.Dense_0.bias)
|
||||
|
||||
self.GroupNorm_1 = nn.GroupNorm(num_groups=num_groups_out, num_channels=out_ch, eps=eps)
|
||||
self.Dropout_0 = nn.Dropout(dropout)
|
||||
self.Conv_1 = nn.Conv2d(out_ch, out_ch, kernel_size=3, padding=1)
|
||||
if in_ch != out_ch or up or down:
|
||||
# 1x1 convolution with DDPM initialization.
|
||||
self.Conv_2 = nn.Conv2d(in_ch, out_ch, kernel_size=1, padding=0)
|
||||
|
||||
self.in_ch = in_ch
|
||||
self.out_ch = out_ch
|
||||
self.set_weights_score_vde()
|
||||
|
||||
def set_weights_grad_tts(self):
|
||||
self.conv1.weight.data = self.block1.block[0].weight.data
|
||||
self.conv1.bias.data = self.block1.block[0].bias.data
|
||||
self.norm1.weight.data = self.block1.block[1].weight.data
|
||||
self.norm1.bias.data = self.block1.block[1].bias.data
|
||||
|
||||
self.conv2.weight.data = self.block2.block[0].weight.data
|
||||
self.conv2.bias.data = self.block2.block[0].bias.data
|
||||
self.norm2.weight.data = self.block2.block[1].weight.data
|
||||
self.norm2.bias.data = self.block2.block[1].bias.data
|
||||
|
||||
self.temb_proj.weight.data = self.mlp[1].weight.data
|
||||
self.temb_proj.bias.data = self.mlp[1].bias.data
|
||||
|
||||
if self.in_channels != self.out_channels:
|
||||
self.nin_shortcut.weight.data = self.res_conv.weight.data
|
||||
self.nin_shortcut.bias.data = self.res_conv.bias.data
|
||||
|
||||
def set_weights_ldm(self):
|
||||
self.norm1.weight.data = self.in_layers[0].weight.data
|
||||
self.norm1.bias.data = self.in_layers[0].bias.data
|
||||
|
||||
self.conv1.weight.data = self.in_layers[-1].weight.data
|
||||
self.conv1.bias.data = self.in_layers[-1].bias.data
|
||||
|
||||
self.temb_proj.weight.data = self.emb_layers[-1].weight.data
|
||||
self.temb_proj.bias.data = self.emb_layers[-1].bias.data
|
||||
|
||||
self.norm2.weight.data = self.out_layers[0].weight.data
|
||||
self.norm2.bias.data = self.out_layers[0].bias.data
|
||||
|
||||
self.conv2.weight.data = self.out_layers[-1].weight.data
|
||||
self.conv2.bias.data = self.out_layers[-1].bias.data
|
||||
|
||||
if self.in_channels != self.out_channels:
|
||||
self.nin_shortcut.weight.data = self.skip_connection.weight.data
|
||||
self.nin_shortcut.bias.data = self.skip_connection.bias.data
|
||||
|
||||
def set_weights_score_vde(self):
|
||||
self.conv1.weight.data = self.Conv_0.weight.data
|
||||
self.conv1.bias.data = self.Conv_0.bias.data
|
||||
self.norm1.weight.data = self.GroupNorm_0.weight.data
|
||||
self.norm1.bias.data = self.GroupNorm_0.bias.data
|
||||
|
||||
self.conv2.weight.data = self.Conv_1.weight.data
|
||||
self.conv2.bias.data = self.Conv_1.bias.data
|
||||
self.norm2.weight.data = self.GroupNorm_1.weight.data
|
||||
self.norm2.bias.data = self.GroupNorm_1.bias.data
|
||||
|
||||
self.temb_proj.weight.data = self.Dense_0.weight.data
|
||||
self.temb_proj.bias.data = self.Dense_0.bias.data
|
||||
|
||||
if self.in_channels != self.out_channels or self.up or self.down:
|
||||
self.nin_shortcut.weight.data = self.Conv_2.weight.data
|
||||
self.nin_shortcut.bias.data = self.Conv_2.bias.data
|
||||
|
||||
def forward(self, x, temb, hey=False, mask=1.0):
|
||||
# TODO(Patrick) eventually this class should be split into multiple classes
|
||||
# too many if else statements
|
||||
if self.overwrite_for_grad_tts and not self.is_overwritten:
|
||||
self.set_weights_grad_tts()
|
||||
self.is_overwritten = True
|
||||
# elif self.overwrite_for_score_vde and not self.is_overwritten:
|
||||
# self.set_weights_score_vde()
|
||||
# self.is_overwritten = True
|
||||
|
||||
# h2 tensor(110029.2109)
|
||||
# h3 tensor(49596.9492)
|
||||
|
||||
h = x
|
||||
|
||||
h = h * mask
|
||||
if self.pre_norm:
|
||||
h = self.norm1(h)
|
||||
h = self.nonlinearity(h)
|
||||
|
||||
if self.upsample is not None:
|
||||
x = self.upsample(x)
|
||||
h = self.upsample(h)
|
||||
elif self.downsample is not None:
|
||||
x = self.downsample(x)
|
||||
h = self.downsample(h)
|
||||
|
||||
h = self.conv1(h)
|
||||
|
||||
if not self.pre_norm:
|
||||
h = self.norm1(h)
|
||||
h = self.nonlinearity(h)
|
||||
h = h * mask
|
||||
|
||||
if temb is not None:
|
||||
temb = self.temb_proj(self.nonlinearity(temb))[:, :, None, None]
|
||||
else:
|
||||
temb = 0
|
||||
|
||||
if self.time_embedding_norm == "scale_shift":
|
||||
scale, shift = torch.chunk(temb, 2, dim=1)
|
||||
|
||||
h = self.norm2(h)
|
||||
h = h + h * scale + shift
|
||||
h = self.nonlinearity(h)
|
||||
elif self.time_embedding_norm == "default":
|
||||
h = h + temb
|
||||
h = h * mask
|
||||
if self.pre_norm:
|
||||
h = self.norm2(h)
|
||||
h = self.nonlinearity(h)
|
||||
|
||||
h = self.dropout(h)
|
||||
h = self.conv2(h)
|
||||
|
||||
if not self.pre_norm:
|
||||
h = self.norm2(h)
|
||||
h = self.nonlinearity(h)
|
||||
h = h * mask
|
||||
|
||||
x = x * mask
|
||||
if self.nin_shortcut is not None:
|
||||
x = self.nin_shortcut(x)
|
||||
|
||||
out = (x + h) / self.output_scale_factor
|
||||
|
||||
return out
|
||||
|
||||
|
||||
# TODO(Patrick) - just there to convert the weights; can delete afterward
|
||||
class Block(torch.nn.Module):
|
||||
def __init__(self, dim, dim_out, groups=8):
|
||||
super(Block, self).__init__()
|
||||
self.block = torch.nn.Sequential(
|
||||
torch.nn.Conv2d(dim, dim_out, 3, padding=1), torch.nn.GroupNorm(groups, dim_out), Mish()
|
||||
)
|
||||
|
||||
|
||||
# HELPER Modules
|
||||
|
||||
|
||||
def normalization(channels, swish=0.0):
|
||||
"""
|
||||
Make a standard normalization layer, with an optional swish activation.
|
||||
|
||||
:param channels: number of input channels. :return: an nn.Module for normalization.
|
||||
"""
|
||||
return GroupNorm32(num_channels=channels, num_groups=32, swish=swish)
|
||||
|
||||
|
||||
class GroupNorm32(nn.GroupNorm):
|
||||
def __init__(self, num_groups, num_channels, swish, eps=1e-5):
|
||||
super().__init__(num_groups=num_groups, num_channels=num_channels, eps=eps)
|
||||
self.swish = swish
|
||||
|
||||
def forward(self, x):
|
||||
y = super().forward(x.float()).to(x.dtype)
|
||||
if self.swish == 1.0:
|
||||
y = F.silu(y)
|
||||
elif self.swish:
|
||||
y = y * F.sigmoid(y * float(self.swish))
|
||||
return y
|
||||
|
||||
|
||||
def linear(*args, **kwargs):
|
||||
"""
|
||||
Create a linear module.
|
||||
"""
|
||||
return nn.Linear(*args, **kwargs)
|
||||
|
||||
|
||||
def zero_module(module):
|
||||
"""
|
||||
Zero out the parameters of a module and return it.
|
||||
"""
|
||||
for p in module.parameters():
|
||||
p.detach().zero_()
|
||||
return module
|
||||
|
||||
|
||||
class Mish(torch.nn.Module):
|
||||
def forward(self, x):
|
||||
return x * torch.tanh(torch.nn.functional.softplus(x))
|
||||
|
||||
|
||||
class Conv1dBlock(nn.Module):
|
||||
"""
|
||||
Conv1d --> GroupNorm --> Mish
|
||||
"""
|
||||
|
||||
def __init__(self, inp_channels, out_channels, kernel_size, n_groups=8):
|
||||
super().__init__()
|
||||
|
||||
self.block = nn.Sequential(
|
||||
nn.Conv1d(inp_channels, out_channels, kernel_size, padding=kernel_size // 2),
|
||||
RearrangeDim(),
|
||||
# Rearrange("batch channels horizon -> batch channels 1 horizon"),
|
||||
nn.GroupNorm(n_groups, out_channels),
|
||||
RearrangeDim(),
|
||||
# Rearrange("batch channels 1 horizon -> batch channels horizon"),
|
||||
nn.Mish(),
|
||||
)
|
||||
|
||||
def forward(self, x):
|
||||
return self.block(x)
|
||||
|
||||
|
||||
class RearrangeDim(nn.Module):
|
||||
def __init__(self):
|
||||
super().__init__()
|
||||
|
||||
def forward(self, tensor):
|
||||
if len(tensor.shape) == 2:
|
||||
return tensor[:, :, None]
|
||||
if len(tensor.shape) == 3:
|
||||
return tensor[:, :, None, :]
|
||||
elif len(tensor.shape) == 4:
|
||||
return tensor[:, :, 0, :]
|
||||
else:
|
||||
raise ValueError(f"`len(tensor)`: {len(tensor)} has to be 2, 3 or 4.")
|
||||
|
||||
|
||||
def upsample_2d(x, k=None, factor=2, gain=1):
|
||||
r"""Upsample2D a batch of 2D images with the given filter.
|
||||
|
||||
Args:
|
||||
Accepts a batch of 2D images of the shape `[N, C, H, W]` or `[N, H, W, C]` and upsamples each image with the given
|
||||
filter. The filter is normalized so that if the input pixels are constant, they will be scaled by the specified
|
||||
`gain`. Pixels outside the image are assumed to be zero, and the filter is padded with zeros so that its shape is a:
|
||||
multiple of the upsampling factor.
|
||||
x: Input tensor of the shape `[N, C, H, W]` or `[N, H, W,
|
||||
C]`.
|
||||
k: FIR filter of the shape `[firH, firW]` or `[firN]`
|
||||
(separable). The default is `[1] * factor`, which corresponds to nearest-neighbor upsampling.
|
||||
factor: Integer upsampling factor (default: 2). gain: Scaling factor for signal magnitude (default: 1.0).
|
||||
|
||||
Returns:
|
||||
Tensor of the shape `[N, C, H * factor, W * factor]`
|
||||
"""
|
||||
assert isinstance(factor, int) and factor >= 1
|
||||
if k is None:
|
||||
k = [1] * factor
|
||||
|
||||
k = np.asarray(k, dtype=np.float32)
|
||||
if k.ndim == 1:
|
||||
k = np.outer(k, k)
|
||||
k /= np.sum(k)
|
||||
|
||||
k = k * (gain * (factor**2))
|
||||
p = k.shape[0] - factor
|
||||
return upfirdn2d_native(x, torch.tensor(k, device=x.device), up=factor, pad=((p + 1) // 2 + factor - 1, p // 2))
|
||||
|
||||
|
||||
def downsample_2d(x, k=None, factor=2, gain=1):
|
||||
r"""Downsample2D a batch of 2D images with the given filter.
|
||||
|
||||
Args:
|
||||
Accepts a batch of 2D images of the shape `[N, C, H, W]` or `[N, H, W, C]` and downsamples each image with the
|
||||
given filter. The filter is normalized so that if the input pixels are constant, they will be scaled by the
|
||||
specified `gain`. Pixels outside the image are assumed to be zero, and the filter is padded with zeros so that its
|
||||
shape is a multiple of the downsampling factor.
|
||||
x: Input tensor of the shape `[N, C, H, W]` or `[N, H, W,
|
||||
C]`.
|
||||
k: FIR filter of the shape `[firH, firW]` or `[firN]`
|
||||
(separable). The default is `[1] * factor`, which corresponds to average pooling.
|
||||
factor: Integer downsampling factor (default: 2). gain: Scaling factor for signal magnitude (default: 1.0).
|
||||
|
||||
Returns:
|
||||
Tensor of the shape `[N, C, H // factor, W // factor]`
|
||||
"""
|
||||
|
||||
assert isinstance(factor, int) and factor >= 1
|
||||
if k is None:
|
||||
k = [1] * factor
|
||||
|
||||
k = np.asarray(k, dtype=np.float32)
|
||||
if k.ndim == 1:
|
||||
k = np.outer(k, k)
|
||||
k /= np.sum(k)
|
||||
|
||||
k = k * gain
|
||||
p = k.shape[0] - factor
|
||||
return upfirdn2d_native(x, torch.tensor(k, device=x.device), down=factor, pad=((p + 1) // 2, p // 2))
|
||||
|
||||
|
||||
def upfirdn2d_native(input, kernel, up=1, down=1, pad=(0, 0)):
|
||||
up_x = up_y = up
|
||||
down_x = down_y = down
|
||||
pad_x0 = pad_y0 = pad[0]
|
||||
pad_x1 = pad_y1 = pad[1]
|
||||
|
||||
_, channel, in_h, in_w = input.shape
|
||||
input = input.reshape(-1, in_h, in_w, 1)
|
||||
|
||||
_, in_h, in_w, minor = input.shape
|
||||
kernel_h, kernel_w = kernel.shape
|
||||
|
||||
out = input.view(-1, in_h, 1, in_w, 1, minor)
|
||||
out = F.pad(out, [0, 0, 0, up_x - 1, 0, 0, 0, up_y - 1])
|
||||
out = out.view(-1, in_h * up_y, in_w * up_x, minor)
|
||||
|
||||
out = F.pad(out, [0, 0, max(pad_x0, 0), max(pad_x1, 0), max(pad_y0, 0), max(pad_y1, 0)])
|
||||
out = out[
|
||||
:,
|
||||
max(-pad_y0, 0) : out.shape[1] - max(-pad_y1, 0),
|
||||
max(-pad_x0, 0) : out.shape[2] - max(-pad_x1, 0),
|
||||
:,
|
||||
]
|
||||
|
||||
out = out.permute(0, 3, 1, 2)
|
||||
out = out.reshape([-1, 1, in_h * up_y + pad_y0 + pad_y1, in_w * up_x + pad_x0 + pad_x1])
|
||||
w = torch.flip(kernel, [0, 1]).view(1, 1, kernel_h, kernel_w)
|
||||
out = F.conv2d(out, w)
|
||||
out = out.reshape(
|
||||
-1,
|
||||
minor,
|
||||
in_h * up_y + pad_y0 + pad_y1 - kernel_h + 1,
|
||||
in_w * up_x + pad_x0 + pad_x1 - kernel_w + 1,
|
||||
)
|
||||
out = out.permute(0, 2, 3, 1)
|
||||
out = out[:, ::down_y, ::down_x, :]
|
||||
|
||||
out_h = (in_h * up_y + pad_y0 + pad_y1 - kernel_h) // down_y + 1
|
||||
out_w = (in_w * up_x + pad_x0 + pad_x1 - kernel_w) // down_x + 1
|
||||
|
||||
return out.view(-1, channel, out_h, out_w)
|
||||
498
src/diffusers/models/unet.py
Normal file
498
src/diffusers/models/unet.py
Normal file
@@ -0,0 +1,498 @@
|
||||
# Copyright 2022 The HuggingFace Team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
|
||||
# limitations under the License.
|
||||
|
||||
# helpers functions
|
||||
|
||||
import copy
|
||||
import math
|
||||
from pathlib import Path
|
||||
|
||||
import torch
|
||||
from torch import nn
|
||||
from torch.cuda.amp import GradScaler, autocast
|
||||
from torch.optim import Adam
|
||||
from torch.utils import data
|
||||
|
||||
from torchvision import transforms, utils
|
||||
from PIL import Image
|
||||
from tqdm import tqdm
|
||||
|
||||
from ..configuration_utils import ConfigMixin
|
||||
from ..modeling_utils import ModelMixin
|
||||
|
||||
|
||||
def get_timestep_embedding(timesteps, embedding_dim):
|
||||
"""
|
||||
This matches the implementation in Denoising Diffusion Probabilistic Models:
|
||||
From Fairseq.
|
||||
Build sinusoidal embeddings.
|
||||
This matches the implementation in tensor2tensor, but differs slightly
|
||||
from the description in Section 3.5 of "Attention Is All You Need".
|
||||
"""
|
||||
assert len(timesteps.shape) == 1
|
||||
|
||||
half_dim = embedding_dim // 2
|
||||
emb = math.log(10000) / (half_dim - 1)
|
||||
emb = torch.exp(torch.arange(half_dim, dtype=torch.float32) * -emb)
|
||||
emb = emb.to(device=timesteps.device)
|
||||
emb = timesteps.float()[:, None] * emb[None, :]
|
||||
emb = torch.cat([torch.sin(emb), torch.cos(emb)], dim=1)
|
||||
if embedding_dim % 2 == 1: # zero pad
|
||||
emb = torch.nn.functional.pad(emb, (0, 1, 0, 0))
|
||||
return emb
|
||||
|
||||
|
||||
def nonlinearity(x):
|
||||
# swish
|
||||
return x * torch.sigmoid(x)
|
||||
|
||||
|
||||
def Normalize(in_channels):
|
||||
return torch.nn.GroupNorm(num_groups=32, num_channels=in_channels, eps=1e-6, affine=True)
|
||||
|
||||
|
||||
class Upsample(nn.Module):
|
||||
def __init__(self, in_channels, with_conv):
|
||||
super().__init__()
|
||||
self.with_conv = with_conv
|
||||
if self.with_conv:
|
||||
self.conv = torch.nn.Conv2d(in_channels, in_channels, kernel_size=3, stride=1, padding=1)
|
||||
|
||||
def forward(self, x):
|
||||
x = torch.nn.functional.interpolate(x, scale_factor=2.0, mode="nearest")
|
||||
if self.with_conv:
|
||||
x = self.conv(x)
|
||||
return x
|
||||
|
||||
|
||||
class Downsample(nn.Module):
|
||||
def __init__(self, in_channels, with_conv):
|
||||
super().__init__()
|
||||
self.with_conv = with_conv
|
||||
if self.with_conv:
|
||||
# no asymmetric padding in torch conv, must do it ourselves
|
||||
self.conv = torch.nn.Conv2d(in_channels, in_channels, kernel_size=3, stride=2, padding=0)
|
||||
|
||||
def forward(self, x):
|
||||
if self.with_conv:
|
||||
pad = (0, 1, 0, 1)
|
||||
x = torch.nn.functional.pad(x, pad, mode="constant", value=0)
|
||||
x = self.conv(x)
|
||||
else:
|
||||
x = torch.nn.functional.avg_pool2d(x, kernel_size=2, stride=2)
|
||||
return x
|
||||
|
||||
|
||||
class ResnetBlock(nn.Module):
|
||||
def __init__(self, *, in_channels, out_channels=None, conv_shortcut=False, dropout, temb_channels=512):
|
||||
super().__init__()
|
||||
self.in_channels = in_channels
|
||||
out_channels = in_channels if out_channels is None else out_channels
|
||||
self.out_channels = out_channels
|
||||
self.use_conv_shortcut = conv_shortcut
|
||||
|
||||
self.norm1 = Normalize(in_channels)
|
||||
self.conv1 = torch.nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=1, padding=1)
|
||||
self.temb_proj = torch.nn.Linear(temb_channels, out_channels)
|
||||
self.norm2 = Normalize(out_channels)
|
||||
self.dropout = torch.nn.Dropout(dropout)
|
||||
self.conv2 = torch.nn.Conv2d(out_channels, out_channels, kernel_size=3, stride=1, padding=1)
|
||||
if self.in_channels != self.out_channels:
|
||||
if self.use_conv_shortcut:
|
||||
self.conv_shortcut = torch.nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=1, padding=1)
|
||||
else:
|
||||
self.nin_shortcut = torch.nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=1, padding=0)
|
||||
|
||||
def forward(self, x, temb):
|
||||
h = x
|
||||
h = self.norm1(h)
|
||||
h = nonlinearity(h)
|
||||
h = self.conv1(h)
|
||||
|
||||
h = h + self.temb_proj(nonlinearity(temb))[:, :, None, None]
|
||||
|
||||
h = self.norm2(h)
|
||||
h = nonlinearity(h)
|
||||
h = self.dropout(h)
|
||||
h = self.conv2(h)
|
||||
|
||||
if self.in_channels != self.out_channels:
|
||||
if self.use_conv_shortcut:
|
||||
x = self.conv_shortcut(x)
|
||||
else:
|
||||
x = self.nin_shortcut(x)
|
||||
|
||||
return x + h
|
||||
|
||||
|
||||
class AttnBlock(nn.Module):
|
||||
def __init__(self, in_channels):
|
||||
super().__init__()
|
||||
self.in_channels = in_channels
|
||||
|
||||
self.norm = Normalize(in_channels)
|
||||
self.q = torch.nn.Conv2d(in_channels, in_channels, kernel_size=1, stride=1, padding=0)
|
||||
self.k = torch.nn.Conv2d(in_channels, in_channels, kernel_size=1, stride=1, padding=0)
|
||||
self.v = torch.nn.Conv2d(in_channels, in_channels, kernel_size=1, stride=1, padding=0)
|
||||
self.proj_out = torch.nn.Conv2d(in_channels, in_channels, kernel_size=1, stride=1, padding=0)
|
||||
|
||||
def forward(self, x):
|
||||
h_ = x
|
||||
h_ = self.norm(h_)
|
||||
q = self.q(h_)
|
||||
k = self.k(h_)
|
||||
v = self.v(h_)
|
||||
|
||||
# compute attention
|
||||
b, c, h, w = q.shape
|
||||
q = q.reshape(b, c, h * w)
|
||||
q = q.permute(0, 2, 1) # b,hw,c
|
||||
k = k.reshape(b, c, h * w) # b,c,hw
|
||||
w_ = torch.bmm(q, k) # b,hw,hw w[b,i,j]=sum_c q[b,i,c]k[b,c,j]
|
||||
w_ = w_ * (int(c) ** (-0.5))
|
||||
w_ = torch.nn.functional.softmax(w_, dim=2)
|
||||
|
||||
# attend to values
|
||||
v = v.reshape(b, c, h * w)
|
||||
w_ = w_.permute(0, 2, 1) # b,hw,hw (first hw of k, second of q)
|
||||
h_ = torch.bmm(v, w_) # b, c,hw (hw of q) h_[b,c,j] = sum_i v[b,c,i] w_[b,i,j]
|
||||
h_ = h_.reshape(b, c, h, w)
|
||||
|
||||
h_ = self.proj_out(h_)
|
||||
|
||||
return x + h_
|
||||
|
||||
|
||||
class UNetModel(ModelMixin, ConfigMixin):
|
||||
def __init__(
|
||||
self,
|
||||
ch=128,
|
||||
out_ch=3,
|
||||
ch_mult=(1, 1, 2, 2, 4, 4),
|
||||
num_res_blocks=2,
|
||||
attn_resolutions=(16,),
|
||||
dropout=0.0,
|
||||
resamp_with_conv=True,
|
||||
in_channels=3,
|
||||
resolution=256,
|
||||
):
|
||||
super().__init__()
|
||||
self.register(
|
||||
ch=ch,
|
||||
out_ch=out_ch,
|
||||
ch_mult=ch_mult,
|
||||
num_res_blocks=num_res_blocks,
|
||||
attn_resolutions=attn_resolutions,
|
||||
dropout=dropout,
|
||||
resamp_with_conv=resamp_with_conv,
|
||||
in_channels=in_channels,
|
||||
resolution=resolution,
|
||||
)
|
||||
ch_mult = tuple(ch_mult)
|
||||
self.ch = ch
|
||||
self.temb_ch = self.ch * 4
|
||||
self.num_resolutions = len(ch_mult)
|
||||
self.num_res_blocks = num_res_blocks
|
||||
self.resolution = resolution
|
||||
self.in_channels = in_channels
|
||||
|
||||
# timestep embedding
|
||||
self.temb = nn.Module()
|
||||
self.temb.dense = nn.ModuleList(
|
||||
[
|
||||
torch.nn.Linear(self.ch, self.temb_ch),
|
||||
torch.nn.Linear(self.temb_ch, self.temb_ch),
|
||||
]
|
||||
)
|
||||
|
||||
# downsampling
|
||||
self.conv_in = torch.nn.Conv2d(in_channels, self.ch, kernel_size=3, stride=1, padding=1)
|
||||
|
||||
curr_res = resolution
|
||||
in_ch_mult = (1,) + ch_mult
|
||||
self.down = nn.ModuleList()
|
||||
for i_level in range(self.num_resolutions):
|
||||
block = nn.ModuleList()
|
||||
attn = nn.ModuleList()
|
||||
block_in = ch * in_ch_mult[i_level]
|
||||
block_out = ch * ch_mult[i_level]
|
||||
for i_block in range(self.num_res_blocks):
|
||||
block.append(
|
||||
ResnetBlock(
|
||||
in_channels=block_in, out_channels=block_out, temb_channels=self.temb_ch, dropout=dropout
|
||||
)
|
||||
)
|
||||
block_in = block_out
|
||||
if curr_res in attn_resolutions:
|
||||
attn.append(AttnBlock(block_in))
|
||||
down = nn.Module()
|
||||
down.block = block
|
||||
down.attn = attn
|
||||
if i_level != self.num_resolutions - 1:
|
||||
down.downsample = Downsample(block_in, resamp_with_conv)
|
||||
curr_res = curr_res // 2
|
||||
self.down.append(down)
|
||||
|
||||
# middle
|
||||
self.mid = nn.Module()
|
||||
self.mid.block_1 = ResnetBlock(
|
||||
in_channels=block_in, out_channels=block_in, temb_channels=self.temb_ch, dropout=dropout
|
||||
)
|
||||
self.mid.attn_1 = AttnBlock(block_in)
|
||||
self.mid.block_2 = ResnetBlock(
|
||||
in_channels=block_in, out_channels=block_in, temb_channels=self.temb_ch, dropout=dropout
|
||||
)
|
||||
|
||||
# upsampling
|
||||
self.up = nn.ModuleList()
|
||||
for i_level in reversed(range(self.num_resolutions)):
|
||||
block = nn.ModuleList()
|
||||
attn = nn.ModuleList()
|
||||
block_out = ch * ch_mult[i_level]
|
||||
skip_in = ch * ch_mult[i_level]
|
||||
for i_block in range(self.num_res_blocks + 1):
|
||||
if i_block == self.num_res_blocks:
|
||||
skip_in = ch * in_ch_mult[i_level]
|
||||
block.append(
|
||||
ResnetBlock(
|
||||
in_channels=block_in + skip_in,
|
||||
out_channels=block_out,
|
||||
temb_channels=self.temb_ch,
|
||||
dropout=dropout,
|
||||
)
|
||||
)
|
||||
block_in = block_out
|
||||
if curr_res in attn_resolutions:
|
||||
attn.append(AttnBlock(block_in))
|
||||
up = nn.Module()
|
||||
up.block = block
|
||||
up.attn = attn
|
||||
if i_level != 0:
|
||||
up.upsample = Upsample(block_in, resamp_with_conv)
|
||||
curr_res = curr_res * 2
|
||||
self.up.insert(0, up) # prepend to get consistent order
|
||||
|
||||
# end
|
||||
self.norm_out = Normalize(block_in)
|
||||
self.conv_out = torch.nn.Conv2d(block_in, out_ch, kernel_size=3, stride=1, padding=1)
|
||||
|
||||
def forward(self, x, t):
|
||||
assert x.shape[2] == x.shape[3] == self.resolution
|
||||
|
||||
if not torch.is_tensor(t):
|
||||
t = torch.tensor([t], dtype=torch.long, device=x.device)
|
||||
|
||||
# timestep embedding
|
||||
temb = get_timestep_embedding(t, self.ch)
|
||||
temb = self.temb.dense[0](temb)
|
||||
temb = nonlinearity(temb)
|
||||
temb = self.temb.dense[1](temb)
|
||||
|
||||
# downsampling
|
||||
hs = [self.conv_in(x)]
|
||||
for i_level in range(self.num_resolutions):
|
||||
for i_block in range(self.num_res_blocks):
|
||||
h = self.down[i_level].block[i_block](hs[-1], temb)
|
||||
if len(self.down[i_level].attn) > 0:
|
||||
h = self.down[i_level].attn[i_block](h)
|
||||
hs.append(h)
|
||||
if i_level != self.num_resolutions - 1:
|
||||
hs.append(self.down[i_level].downsample(hs[-1]))
|
||||
|
||||
# middle
|
||||
h = hs[-1]
|
||||
h = self.mid.block_1(h, temb)
|
||||
h = self.mid.attn_1(h)
|
||||
h = self.mid.block_2(h, temb)
|
||||
|
||||
# upsampling
|
||||
for i_level in reversed(range(self.num_resolutions)):
|
||||
for i_block in range(self.num_res_blocks + 1):
|
||||
h = self.up[i_level].block[i_block](torch.cat([h, hs.pop()], dim=1), temb)
|
||||
if len(self.up[i_level].attn) > 0:
|
||||
h = self.up[i_level].attn[i_block](h)
|
||||
if i_level != 0:
|
||||
h = self.up[i_level].upsample(h)
|
||||
|
||||
# end
|
||||
h = self.norm_out(h)
|
||||
h = nonlinearity(h)
|
||||
h = self.conv_out(h)
|
||||
return h
|
||||
|
||||
|
||||
# dataset classes
|
||||
|
||||
class Dataset(data.Dataset):
|
||||
def __init__(self, folder, image_size, exts=['jpg', 'jpeg', 'png']):
|
||||
super().__init__()
|
||||
self.folder = folder
|
||||
self.image_size = image_size
|
||||
self.paths = [p for ext in exts for p in Path(f'{folder}').glob(f'**/*.{ext}')]
|
||||
|
||||
self.transform = transforms.Compose([
|
||||
transforms.Resize(image_size),
|
||||
transforms.RandomHorizontalFlip(),
|
||||
transforms.CenterCrop(image_size),
|
||||
transforms.ToTensor()
|
||||
])
|
||||
|
||||
def __len__(self):
|
||||
return len(self.paths)
|
||||
|
||||
def __getitem__(self, index):
|
||||
path = self.paths[index]
|
||||
img = Image.open(path)
|
||||
return self.transform(img)
|
||||
|
||||
|
||||
# trainer class
|
||||
class EMA():
|
||||
def __init__(self, beta):
|
||||
super().__init__()
|
||||
self.beta = beta
|
||||
|
||||
def update_model_average(self, ma_model, current_model):
|
||||
for current_params, ma_params in zip(current_model.parameters(), ma_model.parameters()):
|
||||
old_weight, up_weight = ma_params.data, current_params.data
|
||||
ma_params.data = self.update_average(old_weight, up_weight)
|
||||
|
||||
def update_average(self, old, new):
|
||||
if old is None:
|
||||
return new
|
||||
return old * self.beta + (1 - self.beta) * new
|
||||
|
||||
|
||||
def cycle(dl):
|
||||
while True:
|
||||
for data_dl in dl:
|
||||
yield data_dl
|
||||
|
||||
|
||||
def num_to_groups(num, divisor):
|
||||
groups = num // divisor
|
||||
remainder = num % divisor
|
||||
arr = [divisor] * groups
|
||||
if remainder > 0:
|
||||
arr.append(remainder)
|
||||
return arr
|
||||
|
||||
|
||||
class Trainer(object):
|
||||
def __init__(
|
||||
self,
|
||||
diffusion_model,
|
||||
folder,
|
||||
*,
|
||||
ema_decay=0.995,
|
||||
image_size=128,
|
||||
train_batch_size=32,
|
||||
train_lr=1e-4,
|
||||
train_num_steps=100000,
|
||||
gradient_accumulate_every=2,
|
||||
amp=False,
|
||||
step_start_ema=2000,
|
||||
update_ema_every=10,
|
||||
save_and_sample_every=1000,
|
||||
results_folder="./results",
|
||||
):
|
||||
super().__init__()
|
||||
self.model = diffusion_model
|
||||
self.ema = EMA(ema_decay)
|
||||
self.ema_model = copy.deepcopy(self.model)
|
||||
self.update_ema_every = update_ema_every
|
||||
|
||||
self.step_start_ema = step_start_ema
|
||||
self.save_and_sample_every = save_and_sample_every
|
||||
|
||||
self.batch_size = train_batch_size
|
||||
self.image_size = diffusion_model.image_size
|
||||
self.gradient_accumulate_every = gradient_accumulate_every
|
||||
self.train_num_steps = train_num_steps
|
||||
|
||||
self.ds = Dataset(folder, image_size)
|
||||
self.dl = cycle(data.DataLoader(self.ds, batch_size=train_batch_size, shuffle=True, pin_memory=True))
|
||||
self.opt = Adam(diffusion_model.parameters(), lr=train_lr)
|
||||
|
||||
self.step = 0
|
||||
|
||||
self.amp = amp
|
||||
self.scaler = GradScaler(enabled=amp)
|
||||
|
||||
self.results_folder = Path(results_folder)
|
||||
self.results_folder.mkdir(exist_ok=True)
|
||||
|
||||
self.reset_parameters()
|
||||
|
||||
def reset_parameters(self):
|
||||
self.ema_model.load_state_dict(self.model.state_dict())
|
||||
|
||||
def step_ema(self):
|
||||
if self.step < self.step_start_ema:
|
||||
self.reset_parameters()
|
||||
return
|
||||
self.ema.update_model_average(self.ema_model, self.model)
|
||||
|
||||
def save(self, milestone):
|
||||
data = {
|
||||
"step": self.step,
|
||||
"model": self.model.state_dict(),
|
||||
"ema": self.ema_model.state_dict(),
|
||||
"scaler": self.scaler.state_dict(),
|
||||
}
|
||||
torch.save(data, str(self.results_folder / f"model-{milestone}.pt"))
|
||||
|
||||
def load(self, milestone):
|
||||
data = torch.load(str(self.results_folder / f"model-{milestone}.pt"))
|
||||
|
||||
self.step = data["step"]
|
||||
self.model.load_state_dict(data["model"])
|
||||
self.ema_model.load_state_dict(data["ema"])
|
||||
self.scaler.load_state_dict(data["scaler"])
|
||||
|
||||
def train(self):
|
||||
with tqdm(initial=self.step, total=self.train_num_steps) as pbar:
|
||||
|
||||
while self.step < self.train_num_steps:
|
||||
for i in range(self.gradient_accumulate_every):
|
||||
data = next(self.dl).cuda()
|
||||
|
||||
with autocast(enabled=self.amp):
|
||||
loss = self.model(data)
|
||||
self.scaler.scale(loss / self.gradient_accumulate_every).backward()
|
||||
|
||||
pbar.set_description(f"loss: {loss.item():.4f}")
|
||||
|
||||
self.scaler.step(self.opt)
|
||||
self.scaler.update()
|
||||
self.opt.zero_grad()
|
||||
|
||||
if self.step % self.update_ema_every == 0:
|
||||
self.step_ema()
|
||||
|
||||
if self.step != 0 and self.step % self.save_and_sample_every == 0:
|
||||
self.ema_model.eval()
|
||||
|
||||
milestone = self.step // self.save_and_sample_every
|
||||
batches = num_to_groups(36, self.batch_size)
|
||||
all_images_list = list(map(lambda n: self.ema_model.sample(batch_size=n), batches))
|
||||
all_images = torch.cat(all_images_list, dim=0)
|
||||
utils.save_image(all_images, str(self.results_folder / f"sample-{milestone}.png"), nrow=6)
|
||||
self.save(milestone)
|
||||
|
||||
self.step += 1
|
||||
pbar.update(1)
|
||||
|
||||
print("training complete")
|
||||
@@ -1,182 +0,0 @@
|
||||
from typing import Dict, Union
|
||||
|
||||
import torch
|
||||
import torch.nn as nn
|
||||
|
||||
from ..configuration_utils import ConfigMixin, register_to_config
|
||||
from ..modeling_utils import ModelMixin
|
||||
from .embeddings import GaussianFourierProjection, TimestepEmbedding, Timesteps
|
||||
from .unet_blocks import UNetMidBlock2D, get_down_block, get_up_block
|
||||
|
||||
|
||||
class UNet2DModel(ModelMixin, ConfigMixin):
|
||||
@register_to_config
|
||||
def __init__(
|
||||
self,
|
||||
sample_size=None,
|
||||
in_channels=3,
|
||||
out_channels=3,
|
||||
center_input_sample=False,
|
||||
time_embedding_type="positional",
|
||||
freq_shift=0,
|
||||
flip_sin_to_cos=True,
|
||||
down_block_types=("DownBlock2D", "AttnDownBlock2D", "AttnDownBlock2D", "AttnDownBlock2D"),
|
||||
up_block_types=("AttnUpBlock2D", "AttnUpBlock2D", "AttnUpBlock2D", "UpBlock2D"),
|
||||
block_out_channels=(224, 448, 672, 896),
|
||||
layers_per_block=2,
|
||||
mid_block_scale_factor=1,
|
||||
downsample_padding=1,
|
||||
act_fn="silu",
|
||||
attention_head_dim=8,
|
||||
norm_num_groups=32,
|
||||
norm_eps=1e-5,
|
||||
):
|
||||
super().__init__()
|
||||
|
||||
self.sample_size = sample_size
|
||||
time_embed_dim = block_out_channels[0] * 4
|
||||
|
||||
# input
|
||||
self.conv_in = nn.Conv2d(in_channels, block_out_channels[0], kernel_size=3, padding=(1, 1))
|
||||
|
||||
# time
|
||||
if time_embedding_type == "fourier":
|
||||
self.time_proj = GaussianFourierProjection(embedding_size=block_out_channels[0], scale=16)
|
||||
timestep_input_dim = 2 * block_out_channels[0]
|
||||
elif time_embedding_type == "positional":
|
||||
self.time_proj = Timesteps(block_out_channels[0], flip_sin_to_cos, freq_shift)
|
||||
timestep_input_dim = block_out_channels[0]
|
||||
|
||||
self.time_embedding = TimestepEmbedding(timestep_input_dim, time_embed_dim)
|
||||
|
||||
self.down_blocks = nn.ModuleList([])
|
||||
self.mid_block = None
|
||||
self.up_blocks = nn.ModuleList([])
|
||||
|
||||
# down
|
||||
output_channel = block_out_channels[0]
|
||||
for i, down_block_type in enumerate(down_block_types):
|
||||
input_channel = output_channel
|
||||
output_channel = block_out_channels[i]
|
||||
is_final_block = i == len(block_out_channels) - 1
|
||||
|
||||
down_block = get_down_block(
|
||||
down_block_type,
|
||||
num_layers=layers_per_block,
|
||||
in_channels=input_channel,
|
||||
out_channels=output_channel,
|
||||
temb_channels=time_embed_dim,
|
||||
add_downsample=not is_final_block,
|
||||
resnet_eps=norm_eps,
|
||||
resnet_act_fn=act_fn,
|
||||
attn_num_head_channels=attention_head_dim,
|
||||
downsample_padding=downsample_padding,
|
||||
)
|
||||
self.down_blocks.append(down_block)
|
||||
|
||||
# mid
|
||||
self.mid_block = UNetMidBlock2D(
|
||||
in_channels=block_out_channels[-1],
|
||||
temb_channels=time_embed_dim,
|
||||
resnet_eps=norm_eps,
|
||||
resnet_act_fn=act_fn,
|
||||
output_scale_factor=mid_block_scale_factor,
|
||||
resnet_time_scale_shift="default",
|
||||
attn_num_head_channels=attention_head_dim,
|
||||
resnet_groups=norm_num_groups,
|
||||
)
|
||||
|
||||
# up
|
||||
reversed_block_out_channels = list(reversed(block_out_channels))
|
||||
output_channel = reversed_block_out_channels[0]
|
||||
for i, up_block_type in enumerate(up_block_types):
|
||||
prev_output_channel = output_channel
|
||||
output_channel = reversed_block_out_channels[i]
|
||||
input_channel = reversed_block_out_channels[min(i + 1, len(block_out_channels) - 1)]
|
||||
|
||||
is_final_block = i == len(block_out_channels) - 1
|
||||
|
||||
up_block = get_up_block(
|
||||
up_block_type,
|
||||
num_layers=layers_per_block + 1,
|
||||
in_channels=input_channel,
|
||||
out_channels=output_channel,
|
||||
prev_output_channel=prev_output_channel,
|
||||
temb_channels=time_embed_dim,
|
||||
add_upsample=not is_final_block,
|
||||
resnet_eps=norm_eps,
|
||||
resnet_act_fn=act_fn,
|
||||
attn_num_head_channels=attention_head_dim,
|
||||
)
|
||||
self.up_blocks.append(up_block)
|
||||
prev_output_channel = output_channel
|
||||
|
||||
# out
|
||||
num_groups_out = norm_num_groups if norm_num_groups is not None else min(block_out_channels[0] // 4, 32)
|
||||
self.conv_norm_out = nn.GroupNorm(num_channels=block_out_channels[0], num_groups=num_groups_out, eps=norm_eps)
|
||||
self.conv_act = nn.SiLU()
|
||||
self.conv_out = nn.Conv2d(block_out_channels[0], out_channels, 3, padding=1)
|
||||
|
||||
def forward(
|
||||
self, sample: torch.FloatTensor, timestep: Union[torch.Tensor, float, int]
|
||||
) -> Dict[str, torch.FloatTensor]:
|
||||
|
||||
# 0. center input if necessary
|
||||
if self.config.center_input_sample:
|
||||
sample = 2 * sample - 1.0
|
||||
|
||||
# 1. time
|
||||
timesteps = timestep
|
||||
if not torch.is_tensor(timesteps):
|
||||
timesteps = torch.tensor([timesteps], dtype=torch.long, device=sample.device)
|
||||
elif torch.is_tensor(timesteps) and len(timesteps.shape) == 0:
|
||||
timesteps = timesteps[None].to(sample.device)
|
||||
|
||||
t_emb = self.time_proj(timesteps)
|
||||
emb = self.time_embedding(t_emb)
|
||||
|
||||
# 2. pre-process
|
||||
skip_sample = sample
|
||||
sample = self.conv_in(sample)
|
||||
|
||||
# 3. down
|
||||
down_block_res_samples = (sample,)
|
||||
for downsample_block in self.down_blocks:
|
||||
if hasattr(downsample_block, "skip_conv"):
|
||||
sample, res_samples, skip_sample = downsample_block(
|
||||
hidden_states=sample, temb=emb, skip_sample=skip_sample
|
||||
)
|
||||
else:
|
||||
sample, res_samples = downsample_block(hidden_states=sample, temb=emb)
|
||||
|
||||
down_block_res_samples += res_samples
|
||||
|
||||
# 4. mid
|
||||
sample = self.mid_block(sample, emb)
|
||||
|
||||
# 5. up
|
||||
skip_sample = None
|
||||
for upsample_block in self.up_blocks:
|
||||
res_samples = down_block_res_samples[-len(upsample_block.resnets) :]
|
||||
down_block_res_samples = down_block_res_samples[: -len(upsample_block.resnets)]
|
||||
|
||||
if hasattr(upsample_block, "skip_conv"):
|
||||
sample, skip_sample = upsample_block(sample, res_samples, emb, skip_sample)
|
||||
else:
|
||||
sample = upsample_block(sample, res_samples, emb)
|
||||
|
||||
# 6. post-process
|
||||
sample = self.conv_norm_out(sample)
|
||||
sample = self.conv_act(sample)
|
||||
sample = self.conv_out(sample)
|
||||
|
||||
if skip_sample is not None:
|
||||
sample += skip_sample
|
||||
|
||||
if self.config.time_embedding_type == "fourier":
|
||||
timesteps = timesteps.reshape((sample.shape[0], *([1] * len(sample.shape[1:]))))
|
||||
sample = sample / timesteps
|
||||
|
||||
output = {"sample": sample}
|
||||
|
||||
return output
|
||||
@@ -1,178 +0,0 @@
|
||||
from typing import Dict, Union
|
||||
|
||||
import torch
|
||||
import torch.nn as nn
|
||||
|
||||
from ..configuration_utils import ConfigMixin, register_to_config
|
||||
from ..modeling_utils import ModelMixin
|
||||
from .embeddings import TimestepEmbedding, Timesteps
|
||||
from .unet_blocks import UNetMidBlock2DCrossAttn, get_down_block, get_up_block
|
||||
|
||||
|
||||
class UNet2DConditionModel(ModelMixin, ConfigMixin):
|
||||
@register_to_config
|
||||
def __init__(
|
||||
self,
|
||||
sample_size=None,
|
||||
in_channels=4,
|
||||
out_channels=4,
|
||||
center_input_sample=False,
|
||||
flip_sin_to_cos=True,
|
||||
freq_shift=0,
|
||||
down_block_types=("CrossAttnDownBlock2D", "CrossAttnDownBlock2D", "CrossAttnDownBlock2D", "DownBlock2D"),
|
||||
up_block_types=("UpBlock2D", "CrossAttnUpBlock2D", "CrossAttnUpBlock2D", "CrossAttnUpBlock2D"),
|
||||
block_out_channels=(320, 640, 1280, 1280),
|
||||
layers_per_block=2,
|
||||
downsample_padding=1,
|
||||
mid_block_scale_factor=1,
|
||||
act_fn="silu",
|
||||
norm_num_groups=32,
|
||||
norm_eps=1e-5,
|
||||
attention_head_dim=8,
|
||||
):
|
||||
super().__init__()
|
||||
|
||||
self.sample_size = sample_size
|
||||
time_embed_dim = block_out_channels[0] * 4
|
||||
|
||||
# input
|
||||
self.conv_in = nn.Conv2d(in_channels, block_out_channels[0], kernel_size=3, padding=(1, 1))
|
||||
|
||||
# time
|
||||
self.time_proj = Timesteps(block_out_channels[0], flip_sin_to_cos, freq_shift)
|
||||
timestep_input_dim = block_out_channels[0]
|
||||
|
||||
self.time_embedding = TimestepEmbedding(timestep_input_dim, time_embed_dim)
|
||||
|
||||
self.down_blocks = nn.ModuleList([])
|
||||
self.mid_block = None
|
||||
self.up_blocks = nn.ModuleList([])
|
||||
|
||||
# down
|
||||
output_channel = block_out_channels[0]
|
||||
for i, down_block_type in enumerate(down_block_types):
|
||||
input_channel = output_channel
|
||||
output_channel = block_out_channels[i]
|
||||
is_final_block = i == len(block_out_channels) - 1
|
||||
|
||||
down_block = get_down_block(
|
||||
down_block_type,
|
||||
num_layers=layers_per_block,
|
||||
in_channels=input_channel,
|
||||
out_channels=output_channel,
|
||||
temb_channels=time_embed_dim,
|
||||
add_downsample=not is_final_block,
|
||||
resnet_eps=norm_eps,
|
||||
resnet_act_fn=act_fn,
|
||||
attn_num_head_channels=attention_head_dim,
|
||||
downsample_padding=downsample_padding,
|
||||
)
|
||||
self.down_blocks.append(down_block)
|
||||
|
||||
# mid
|
||||
self.mid_block = UNetMidBlock2DCrossAttn(
|
||||
in_channels=block_out_channels[-1],
|
||||
temb_channels=time_embed_dim,
|
||||
resnet_eps=norm_eps,
|
||||
resnet_act_fn=act_fn,
|
||||
output_scale_factor=mid_block_scale_factor,
|
||||
resnet_time_scale_shift="default",
|
||||
attn_num_head_channels=attention_head_dim,
|
||||
resnet_groups=norm_num_groups,
|
||||
)
|
||||
|
||||
# up
|
||||
reversed_block_out_channels = list(reversed(block_out_channels))
|
||||
output_channel = reversed_block_out_channels[0]
|
||||
for i, up_block_type in enumerate(up_block_types):
|
||||
prev_output_channel = output_channel
|
||||
output_channel = reversed_block_out_channels[i]
|
||||
input_channel = reversed_block_out_channels[min(i + 1, len(block_out_channels) - 1)]
|
||||
|
||||
is_final_block = i == len(block_out_channels) - 1
|
||||
|
||||
up_block = get_up_block(
|
||||
up_block_type,
|
||||
num_layers=layers_per_block + 1,
|
||||
in_channels=input_channel,
|
||||
out_channels=output_channel,
|
||||
prev_output_channel=prev_output_channel,
|
||||
temb_channels=time_embed_dim,
|
||||
add_upsample=not is_final_block,
|
||||
resnet_eps=norm_eps,
|
||||
resnet_act_fn=act_fn,
|
||||
attn_num_head_channels=attention_head_dim,
|
||||
)
|
||||
self.up_blocks.append(up_block)
|
||||
prev_output_channel = output_channel
|
||||
|
||||
# out
|
||||
self.conv_norm_out = nn.GroupNorm(num_channels=block_out_channels[0], num_groups=norm_num_groups, eps=norm_eps)
|
||||
self.conv_act = nn.SiLU()
|
||||
self.conv_out = nn.Conv2d(block_out_channels[0], out_channels, 3, padding=1)
|
||||
|
||||
def forward(
|
||||
self,
|
||||
sample: torch.FloatTensor,
|
||||
timestep: Union[torch.Tensor, float, int],
|
||||
encoder_hidden_states: torch.Tensor,
|
||||
) -> Dict[str, torch.FloatTensor]:
|
||||
|
||||
# 0. center input if necessary
|
||||
if self.config.center_input_sample:
|
||||
sample = 2 * sample - 1.0
|
||||
|
||||
# 1. time
|
||||
timesteps = timestep
|
||||
if not torch.is_tensor(timesteps):
|
||||
timesteps = torch.tensor([timesteps], dtype=torch.long, device=sample.device)
|
||||
elif torch.is_tensor(timesteps) and len(timesteps.shape) == 0:
|
||||
timesteps = timesteps[None].to(sample.device)
|
||||
|
||||
t_emb = self.time_proj(timesteps)
|
||||
emb = self.time_embedding(t_emb)
|
||||
|
||||
# 2. pre-process
|
||||
sample = self.conv_in(sample)
|
||||
|
||||
# 3. down
|
||||
down_block_res_samples = (sample,)
|
||||
for downsample_block in self.down_blocks:
|
||||
|
||||
if hasattr(downsample_block, "attentions") and downsample_block.attentions is not None:
|
||||
sample, res_samples = downsample_block(
|
||||
hidden_states=sample, temb=emb, encoder_hidden_states=encoder_hidden_states
|
||||
)
|
||||
else:
|
||||
sample, res_samples = downsample_block(hidden_states=sample, temb=emb)
|
||||
|
||||
down_block_res_samples += res_samples
|
||||
|
||||
# 4. mid
|
||||
sample = self.mid_block(sample, emb, encoder_hidden_states=encoder_hidden_states)
|
||||
|
||||
# 5. up
|
||||
for upsample_block in self.up_blocks:
|
||||
|
||||
res_samples = down_block_res_samples[-len(upsample_block.resnets) :]
|
||||
down_block_res_samples = down_block_res_samples[: -len(upsample_block.resnets)]
|
||||
|
||||
if hasattr(upsample_block, "attentions") and upsample_block.attentions is not None:
|
||||
sample = upsample_block(
|
||||
hidden_states=sample,
|
||||
temb=emb,
|
||||
res_hidden_states_tuple=res_samples,
|
||||
encoder_hidden_states=encoder_hidden_states,
|
||||
)
|
||||
else:
|
||||
sample = upsample_block(hidden_states=sample, temb=emb, res_hidden_states_tuple=res_samples)
|
||||
|
||||
# 6. post-process
|
||||
|
||||
sample = self.conv_norm_out(sample)
|
||||
sample = self.conv_act(sample)
|
||||
sample = self.conv_out(sample)
|
||||
|
||||
output = {"sample": sample}
|
||||
|
||||
return output
|
||||
File diff suppressed because it is too large
Load Diff
665
src/diffusers/models/unet_glide.py
Normal file
665
src/diffusers/models/unet_glide.py
Normal file
@@ -0,0 +1,665 @@
|
||||
import math
|
||||
from abc import abstractmethod
|
||||
|
||||
import torch
|
||||
import torch.nn as nn
|
||||
import torch.nn.functional as F
|
||||
|
||||
from ..configuration_utils import ConfigMixin
|
||||
from ..modeling_utils import ModelMixin
|
||||
|
||||
|
||||
def convert_module_to_f16(l):
|
||||
"""
|
||||
Convert primitive modules to float16.
|
||||
"""
|
||||
if isinstance(l, (nn.Conv1d, nn.Conv2d, nn.Conv3d)):
|
||||
l.weight.data = l.weight.data.half()
|
||||
if l.bias is not None:
|
||||
l.bias.data = l.bias.data.half()
|
||||
|
||||
|
||||
def convert_module_to_f32(l):
|
||||
"""
|
||||
Convert primitive modules to float32, undoing convert_module_to_f16().
|
||||
"""
|
||||
if isinstance(l, (nn.Conv1d, nn.Conv2d, nn.Conv3d)):
|
||||
l.weight.data = l.weight.data.float()
|
||||
if l.bias is not None:
|
||||
l.bias.data = l.bias.data.float()
|
||||
|
||||
|
||||
def avg_pool_nd(dims, *args, **kwargs):
|
||||
"""
|
||||
Create a 1D, 2D, or 3D average pooling module.
|
||||
"""
|
||||
if dims == 1:
|
||||
return nn.AvgPool1d(*args, **kwargs)
|
||||
elif dims == 2:
|
||||
return nn.AvgPool2d(*args, **kwargs)
|
||||
elif dims == 3:
|
||||
return nn.AvgPool3d(*args, **kwargs)
|
||||
raise ValueError(f"unsupported dimensions: {dims}")
|
||||
|
||||
|
||||
def conv_nd(dims, *args, **kwargs):
|
||||
"""
|
||||
Create a 1D, 2D, or 3D convolution module.
|
||||
"""
|
||||
if dims == 1:
|
||||
return nn.Conv1d(*args, **kwargs)
|
||||
elif dims == 2:
|
||||
return nn.Conv2d(*args, **kwargs)
|
||||
elif dims == 3:
|
||||
return nn.Conv3d(*args, **kwargs)
|
||||
raise ValueError(f"unsupported dimensions: {dims}")
|
||||
|
||||
|
||||
def linear(*args, **kwargs):
|
||||
"""
|
||||
Create a linear module.
|
||||
"""
|
||||
return nn.Linear(*args, **kwargs)
|
||||
|
||||
|
||||
class GroupNorm32(nn.GroupNorm):
|
||||
def __init__(self, num_groups, num_channels, swish, eps=1e-5):
|
||||
super().__init__(num_groups=num_groups, num_channels=num_channels, eps=eps)
|
||||
self.swish = swish
|
||||
|
||||
def forward(self, x):
|
||||
y = super().forward(x.float()).to(x.dtype)
|
||||
if self.swish == 1.0:
|
||||
y = F.silu(y)
|
||||
elif self.swish:
|
||||
y = y * F.sigmoid(y * float(self.swish))
|
||||
return y
|
||||
|
||||
|
||||
def normalization(channels, swish=0.0):
|
||||
"""
|
||||
Make a standard normalization layer, with an optional swish activation.
|
||||
|
||||
:param channels: number of input channels.
|
||||
:return: an nn.Module for normalization.
|
||||
"""
|
||||
return GroupNorm32(num_channels=channels, num_groups=32, swish=swish)
|
||||
|
||||
|
||||
def timestep_embedding(timesteps, dim, max_period=10000):
|
||||
"""
|
||||
Create sinusoidal timestep embeddings.
|
||||
|
||||
:param timesteps: a 1-D Tensor of N indices, one per batch element.
|
||||
These may be fractional.
|
||||
:param dim: the dimension of the output.
|
||||
:param max_period: controls the minimum frequency of the embeddings.
|
||||
:return: an [N x dim] Tensor of positional embeddings.
|
||||
"""
|
||||
half = dim // 2
|
||||
freqs = torch.exp(-math.log(max_period) * torch.arange(start=0, end=half, dtype=torch.float32) / half).to(
|
||||
device=timesteps.device
|
||||
)
|
||||
args = timesteps[:, None].float() * freqs[None]
|
||||
embedding = torch.cat([torch.cos(args), torch.sin(args)], dim=-1)
|
||||
if dim % 2:
|
||||
embedding = torch.cat([embedding, torch.zeros_like(embedding[:, :1])], dim=-1)
|
||||
return embedding
|
||||
|
||||
|
||||
def zero_module(module):
|
||||
"""
|
||||
Zero out the parameters of a module and return it.
|
||||
"""
|
||||
for p in module.parameters():
|
||||
p.detach().zero_()
|
||||
return module
|
||||
|
||||
|
||||
class TimestepBlock(nn.Module):
|
||||
"""
|
||||
Any module where forward() takes timestep embeddings as a second argument.
|
||||
"""
|
||||
|
||||
@abstractmethod
|
||||
def forward(self, x, emb):
|
||||
"""
|
||||
Apply the module to `x` given `emb` timestep embeddings.
|
||||
"""
|
||||
|
||||
|
||||
class TimestepEmbedSequential(nn.Sequential, TimestepBlock):
|
||||
"""
|
||||
A sequential module that passes timestep embeddings to the children that
|
||||
support it as an extra input.
|
||||
"""
|
||||
|
||||
def forward(self, x, emb, encoder_out=None):
|
||||
for layer in self:
|
||||
if isinstance(layer, TimestepBlock):
|
||||
x = layer(x, emb)
|
||||
elif isinstance(layer, AttentionBlock):
|
||||
x = layer(x, encoder_out)
|
||||
else:
|
||||
x = layer(x)
|
||||
return x
|
||||
|
||||
|
||||
class Upsample(nn.Module):
|
||||
"""
|
||||
An upsampling layer with an optional convolution.
|
||||
|
||||
:param channels: channels in the inputs and outputs.
|
||||
:param use_conv: a bool determining if a convolution is applied.
|
||||
:param dims: determines if the signal is 1D, 2D, or 3D. If 3D, then
|
||||
upsampling occurs in the inner-two dimensions.
|
||||
"""
|
||||
|
||||
def __init__(self, channels, use_conv, dims=2, out_channels=None):
|
||||
super().__init__()
|
||||
self.channels = channels
|
||||
self.out_channels = out_channels or channels
|
||||
self.use_conv = use_conv
|
||||
self.dims = dims
|
||||
if use_conv:
|
||||
self.conv = conv_nd(dims, self.channels, self.out_channels, 3, padding=1)
|
||||
|
||||
def forward(self, x):
|
||||
assert x.shape[1] == self.channels
|
||||
if self.dims == 3:
|
||||
x = F.interpolate(x, (x.shape[2], x.shape[3] * 2, x.shape[4] * 2), mode="nearest")
|
||||
else:
|
||||
x = F.interpolate(x, scale_factor=2, mode="nearest")
|
||||
if self.use_conv:
|
||||
x = self.conv(x)
|
||||
return x
|
||||
|
||||
|
||||
class Downsample(nn.Module):
|
||||
"""
|
||||
A downsampling layer with an optional convolution.
|
||||
|
||||
:param channels: channels in the inputs and outputs.
|
||||
:param use_conv: a bool determining if a convolution is applied.
|
||||
:param dims: determines if the signal is 1D, 2D, or 3D. If 3D, then
|
||||
downsampling occurs in the inner-two dimensions.
|
||||
"""
|
||||
|
||||
def __init__(self, channels, use_conv, dims=2, out_channels=None):
|
||||
super().__init__()
|
||||
self.channels = channels
|
||||
self.out_channels = out_channels or channels
|
||||
self.use_conv = use_conv
|
||||
self.dims = dims
|
||||
stride = 2 if dims != 3 else (1, 2, 2)
|
||||
if use_conv:
|
||||
self.op = conv_nd(dims, self.channels, self.out_channels, 3, stride=stride, padding=1)
|
||||
else:
|
||||
assert self.channels == self.out_channels
|
||||
self.op = avg_pool_nd(dims, kernel_size=stride, stride=stride)
|
||||
|
||||
def forward(self, x):
|
||||
assert x.shape[1] == self.channels
|
||||
return self.op(x)
|
||||
|
||||
|
||||
class ResBlock(TimestepBlock):
|
||||
"""
|
||||
A residual block that can optionally change the number of channels.
|
||||
|
||||
:param channels: the number of input channels.
|
||||
:param emb_channels: the number of timestep embedding channels.
|
||||
:param dropout: the rate of dropout.
|
||||
:param out_channels: if specified, the number of out channels.
|
||||
:param use_conv: if True and out_channels is specified, use a spatial
|
||||
convolution instead of a smaller 1x1 convolution to change the
|
||||
channels in the skip connection.
|
||||
:param dims: determines if the signal is 1D, 2D, or 3D.
|
||||
:param use_checkpoint: if True, use gradient checkpointing on this module.
|
||||
:param up: if True, use this block for upsampling.
|
||||
:param down: if True, use this block for downsampling.
|
||||
"""
|
||||
|
||||
def __init__(
|
||||
self,
|
||||
channels,
|
||||
emb_channels,
|
||||
dropout,
|
||||
out_channels=None,
|
||||
use_conv=False,
|
||||
use_scale_shift_norm=False,
|
||||
dims=2,
|
||||
use_checkpoint=False,
|
||||
up=False,
|
||||
down=False,
|
||||
):
|
||||
super().__init__()
|
||||
self.channels = channels
|
||||
self.emb_channels = emb_channels
|
||||
self.dropout = dropout
|
||||
self.out_channels = out_channels or channels
|
||||
self.use_conv = use_conv
|
||||
self.use_checkpoint = use_checkpoint
|
||||
self.use_scale_shift_norm = use_scale_shift_norm
|
||||
|
||||
self.in_layers = nn.Sequential(
|
||||
normalization(channels, swish=1.0),
|
||||
nn.Identity(),
|
||||
conv_nd(dims, channels, self.out_channels, 3, padding=1),
|
||||
)
|
||||
|
||||
self.updown = up or down
|
||||
|
||||
if up:
|
||||
self.h_upd = Upsample(channels, False, dims)
|
||||
self.x_upd = Upsample(channels, False, dims)
|
||||
elif down:
|
||||
self.h_upd = Downsample(channels, False, dims)
|
||||
self.x_upd = Downsample(channels, False, dims)
|
||||
else:
|
||||
self.h_upd = self.x_upd = nn.Identity()
|
||||
|
||||
self.emb_layers = nn.Sequential(
|
||||
nn.SiLU(),
|
||||
linear(
|
||||
emb_channels,
|
||||
2 * self.out_channels if use_scale_shift_norm else self.out_channels,
|
||||
),
|
||||
)
|
||||
self.out_layers = nn.Sequential(
|
||||
normalization(self.out_channels, swish=0.0 if use_scale_shift_norm else 1.0),
|
||||
nn.SiLU() if use_scale_shift_norm else nn.Identity(),
|
||||
nn.Dropout(p=dropout),
|
||||
zero_module(conv_nd(dims, self.out_channels, self.out_channels, 3, padding=1)),
|
||||
)
|
||||
|
||||
if self.out_channels == channels:
|
||||
self.skip_connection = nn.Identity()
|
||||
elif use_conv:
|
||||
self.skip_connection = conv_nd(dims, channels, self.out_channels, 3, padding=1)
|
||||
else:
|
||||
self.skip_connection = conv_nd(dims, channels, self.out_channels, 1)
|
||||
|
||||
def forward(self, x, emb):
|
||||
"""
|
||||
Apply the block to a Tensor, conditioned on a timestep embedding.
|
||||
|
||||
:param x: an [N x C x ...] Tensor of features.
|
||||
:param emb: an [N x emb_channels] Tensor of timestep embeddings.
|
||||
:return: an [N x C x ...] Tensor of outputs.
|
||||
"""
|
||||
if self.updown:
|
||||
in_rest, in_conv = self.in_layers[:-1], self.in_layers[-1]
|
||||
h = in_rest(x)
|
||||
h = self.h_upd(h)
|
||||
x = self.x_upd(x)
|
||||
h = in_conv(h)
|
||||
else:
|
||||
h = self.in_layers(x)
|
||||
emb_out = self.emb_layers(emb).type(h.dtype)
|
||||
while len(emb_out.shape) < len(h.shape):
|
||||
emb_out = emb_out[..., None]
|
||||
if self.use_scale_shift_norm:
|
||||
out_norm, out_rest = self.out_layers[0], self.out_layers[1:]
|
||||
scale, shift = torch.chunk(emb_out, 2, dim=1)
|
||||
h = out_norm(h) * (1 + scale) + shift
|
||||
h = out_rest(h)
|
||||
else:
|
||||
h = h + emb_out
|
||||
h = self.out_layers(h)
|
||||
return self.skip_connection(x) + h
|
||||
|
||||
|
||||
class AttentionBlock(nn.Module):
|
||||
"""
|
||||
An attention block that allows spatial positions to attend to each other.
|
||||
|
||||
Originally ported from here, but adapted to the N-d case.
|
||||
https://github.com/hojonathanho/diffusion/blob/1e0dceb3b3495bbe19116a5e1b3596cd0706c543/diffusion_tf/models/unet.py#L66.
|
||||
"""
|
||||
|
||||
def __init__(
|
||||
self,
|
||||
channels,
|
||||
num_heads=1,
|
||||
num_head_channels=-1,
|
||||
use_checkpoint=False,
|
||||
encoder_channels=None,
|
||||
):
|
||||
super().__init__()
|
||||
self.channels = channels
|
||||
if num_head_channels == -1:
|
||||
self.num_heads = num_heads
|
||||
else:
|
||||
assert (
|
||||
channels % num_head_channels == 0
|
||||
), f"q,k,v channels {channels} is not divisible by num_head_channels {num_head_channels}"
|
||||
self.num_heads = channels // num_head_channels
|
||||
self.use_checkpoint = use_checkpoint
|
||||
self.norm = normalization(channels, swish=0.0)
|
||||
self.qkv = conv_nd(1, channels, channels * 3, 1)
|
||||
self.attention = QKVAttention(self.num_heads)
|
||||
|
||||
if encoder_channels is not None:
|
||||
self.encoder_kv = conv_nd(1, encoder_channels, channels * 2, 1)
|
||||
self.proj_out = zero_module(conv_nd(1, channels, channels, 1))
|
||||
|
||||
def forward(self, x, encoder_out=None):
|
||||
b, c, *spatial = x.shape
|
||||
qkv = self.qkv(self.norm(x).view(b, c, -1))
|
||||
if encoder_out is not None:
|
||||
encoder_out = self.encoder_kv(encoder_out)
|
||||
h = self.attention(qkv, encoder_out)
|
||||
else:
|
||||
h = self.attention(qkv)
|
||||
h = self.proj_out(h)
|
||||
return x + h.reshape(b, c, *spatial)
|
||||
|
||||
|
||||
class QKVAttention(nn.Module):
|
||||
"""
|
||||
A module which performs QKV attention. Matches legacy QKVAttention + input/ouput heads shaping
|
||||
"""
|
||||
|
||||
def __init__(self, n_heads):
|
||||
super().__init__()
|
||||
self.n_heads = n_heads
|
||||
|
||||
def forward(self, qkv, encoder_kv=None):
|
||||
"""
|
||||
Apply QKV attention.
|
||||
|
||||
:param qkv: an [N x (H * 3 * C) x T] tensor of Qs, Ks, and Vs.
|
||||
:return: an [N x (H * C) x T] tensor after attention.
|
||||
"""
|
||||
bs, width, length = qkv.shape
|
||||
assert width % (3 * self.n_heads) == 0
|
||||
ch = width // (3 * self.n_heads)
|
||||
q, k, v = qkv.reshape(bs * self.n_heads, ch * 3, length).split(ch, dim=1)
|
||||
if encoder_kv is not None:
|
||||
assert encoder_kv.shape[1] == self.n_heads * ch * 2
|
||||
ek, ev = encoder_kv.reshape(bs * self.n_heads, ch * 2, -1).split(ch, dim=1)
|
||||
k = torch.cat([ek, k], dim=-1)
|
||||
v = torch.cat([ev, v], dim=-1)
|
||||
scale = 1 / math.sqrt(math.sqrt(ch))
|
||||
weight = torch.einsum("bct,bcs->bts", q * scale, k * scale) # More stable with f16 than dividing afterwards
|
||||
weight = torch.softmax(weight.float(), dim=-1).type(weight.dtype)
|
||||
a = torch.einsum("bts,bcs->bct", weight, v)
|
||||
return a.reshape(bs, -1, length)
|
||||
|
||||
|
||||
class UNetGLIDEModel(ModelMixin, ConfigMixin):
|
||||
"""
|
||||
The full UNet model with attention and timestep embedding.
|
||||
|
||||
:param in_channels: channels in the input Tensor.
|
||||
:param model_channels: base channel count for the model.
|
||||
:param out_channels: channels in the output Tensor.
|
||||
:param num_res_blocks: number of residual blocks per downsample.
|
||||
:param attention_resolutions: a collection of downsample rates at which
|
||||
attention will take place. May be a set, list, or tuple.
|
||||
For example, if this contains 4, then at 4x downsampling, attention
|
||||
will be used.
|
||||
:param dropout: the dropout probability.
|
||||
:param channel_mult: channel multiplier for each level of the UNet.
|
||||
:param conv_resample: if True, use learned convolutions for upsampling and
|
||||
downsampling.
|
||||
:param dims: determines if the signal is 1D, 2D, or 3D.
|
||||
:param num_classes: if specified (as an int), then this model will be
|
||||
class-conditional with `num_classes` classes.
|
||||
:param use_checkpoint: use gradient checkpointing to reduce memory usage.
|
||||
:param num_heads: the number of attention heads in each attention layer.
|
||||
:param num_heads_channels: if specified, ignore num_heads and instead use
|
||||
a fixed channel width per attention head.
|
||||
:param num_heads_upsample: works with num_heads to set a different number
|
||||
of heads for upsampling. Deprecated.
|
||||
:param use_scale_shift_norm: use a FiLM-like conditioning mechanism.
|
||||
:param resblock_updown: use residual blocks for up/downsampling.
|
||||
"""
|
||||
|
||||
def __init__(
|
||||
self,
|
||||
in_channels,
|
||||
model_channels,
|
||||
out_channels,
|
||||
num_res_blocks,
|
||||
attention_resolutions,
|
||||
dropout=0,
|
||||
channel_mult=(1, 2, 4, 8),
|
||||
conv_resample=True,
|
||||
dims=2,
|
||||
use_checkpoint=False,
|
||||
use_fp16=False,
|
||||
num_heads=1,
|
||||
num_head_channels=-1,
|
||||
num_heads_upsample=-1,
|
||||
use_scale_shift_norm=False,
|
||||
resblock_updown=False,
|
||||
encoder_channels=None,
|
||||
):
|
||||
super().__init__()
|
||||
self.register(
|
||||
in_channels=in_channels,
|
||||
model_channels=model_channels,
|
||||
out_channels=out_channels,
|
||||
num_res_blocks=num_res_blocks,
|
||||
attention_resolutions=attention_resolutions,
|
||||
dropout=dropout,
|
||||
channel_mult=channel_mult,
|
||||
conv_resample=conv_resample,
|
||||
dims=dims,
|
||||
use_checkpoint=use_checkpoint,
|
||||
use_fp16=use_fp16,
|
||||
num_heads=num_heads,
|
||||
num_head_channels=num_head_channels,
|
||||
num_heads_upsample=num_heads_upsample,
|
||||
use_scale_shift_norm=use_scale_shift_norm,
|
||||
resblock_updown=resblock_updown,
|
||||
encoder_channels=encoder_channels,
|
||||
)
|
||||
|
||||
if num_heads_upsample == -1:
|
||||
num_heads_upsample = num_heads
|
||||
|
||||
self.in_channels = in_channels
|
||||
self.model_channels = model_channels
|
||||
self.out_channels = out_channels
|
||||
self.num_res_blocks = num_res_blocks
|
||||
self.attention_resolutions = attention_resolutions
|
||||
self.dropout = dropout
|
||||
self.channel_mult = channel_mult
|
||||
self.conv_resample = conv_resample
|
||||
self.use_checkpoint = use_checkpoint
|
||||
self.dtype = torch.float16 if use_fp16 else torch.float32
|
||||
self.num_heads = num_heads
|
||||
self.num_head_channels = num_head_channels
|
||||
self.num_heads_upsample = num_heads_upsample
|
||||
|
||||
time_embed_dim = model_channels * 4
|
||||
self.time_embed = nn.Sequential(
|
||||
linear(model_channels, time_embed_dim),
|
||||
nn.SiLU(),
|
||||
linear(time_embed_dim, time_embed_dim),
|
||||
)
|
||||
|
||||
ch = input_ch = int(channel_mult[0] * model_channels)
|
||||
self.input_blocks = nn.ModuleList([TimestepEmbedSequential(conv_nd(dims, in_channels, ch, 3, padding=1))])
|
||||
self._feature_size = ch
|
||||
input_block_chans = [ch]
|
||||
ds = 1
|
||||
for level, mult in enumerate(channel_mult):
|
||||
for _ in range(num_res_blocks):
|
||||
layers = [
|
||||
ResBlock(
|
||||
ch,
|
||||
time_embed_dim,
|
||||
dropout,
|
||||
out_channels=int(mult * model_channels),
|
||||
dims=dims,
|
||||
use_checkpoint=use_checkpoint,
|
||||
use_scale_shift_norm=use_scale_shift_norm,
|
||||
)
|
||||
]
|
||||
ch = int(mult * model_channels)
|
||||
if ds in attention_resolutions:
|
||||
layers.append(
|
||||
AttentionBlock(
|
||||
ch,
|
||||
use_checkpoint=use_checkpoint,
|
||||
num_heads=num_heads,
|
||||
num_head_channels=num_head_channels,
|
||||
encoder_channels=encoder_channels,
|
||||
)
|
||||
)
|
||||
self.input_blocks.append(TimestepEmbedSequential(*layers))
|
||||
self._feature_size += ch
|
||||
input_block_chans.append(ch)
|
||||
if level != len(channel_mult) - 1:
|
||||
out_ch = ch
|
||||
self.input_blocks.append(
|
||||
TimestepEmbedSequential(
|
||||
ResBlock(
|
||||
ch,
|
||||
time_embed_dim,
|
||||
dropout,
|
||||
out_channels=out_ch,
|
||||
dims=dims,
|
||||
use_checkpoint=use_checkpoint,
|
||||
use_scale_shift_norm=use_scale_shift_norm,
|
||||
down=True,
|
||||
)
|
||||
if resblock_updown
|
||||
else Downsample(ch, conv_resample, dims=dims, out_channels=out_ch)
|
||||
)
|
||||
)
|
||||
ch = out_ch
|
||||
input_block_chans.append(ch)
|
||||
ds *= 2
|
||||
self._feature_size += ch
|
||||
|
||||
self.middle_block = TimestepEmbedSequential(
|
||||
ResBlock(
|
||||
ch,
|
||||
time_embed_dim,
|
||||
dropout,
|
||||
dims=dims,
|
||||
use_checkpoint=use_checkpoint,
|
||||
use_scale_shift_norm=use_scale_shift_norm,
|
||||
),
|
||||
AttentionBlock(
|
||||
ch,
|
||||
use_checkpoint=use_checkpoint,
|
||||
num_heads=num_heads,
|
||||
num_head_channels=num_head_channels,
|
||||
encoder_channels=encoder_channels,
|
||||
),
|
||||
ResBlock(
|
||||
ch,
|
||||
time_embed_dim,
|
||||
dropout,
|
||||
dims=dims,
|
||||
use_checkpoint=use_checkpoint,
|
||||
use_scale_shift_norm=use_scale_shift_norm,
|
||||
),
|
||||
)
|
||||
self._feature_size += ch
|
||||
|
||||
self.output_blocks = nn.ModuleList([])
|
||||
for level, mult in list(enumerate(channel_mult))[::-1]:
|
||||
for i in range(num_res_blocks + 1):
|
||||
ich = input_block_chans.pop()
|
||||
layers = [
|
||||
ResBlock(
|
||||
ch + ich,
|
||||
time_embed_dim,
|
||||
dropout,
|
||||
out_channels=int(model_channels * mult),
|
||||
dims=dims,
|
||||
use_checkpoint=use_checkpoint,
|
||||
use_scale_shift_norm=use_scale_shift_norm,
|
||||
)
|
||||
]
|
||||
ch = int(model_channels * mult)
|
||||
if ds in attention_resolutions:
|
||||
layers.append(
|
||||
AttentionBlock(
|
||||
ch,
|
||||
use_checkpoint=use_checkpoint,
|
||||
num_heads=num_heads_upsample,
|
||||
num_head_channels=num_head_channels,
|
||||
encoder_channels=encoder_channels,
|
||||
)
|
||||
)
|
||||
if level and i == num_res_blocks:
|
||||
out_ch = ch
|
||||
layers.append(
|
||||
ResBlock(
|
||||
ch,
|
||||
time_embed_dim,
|
||||
dropout,
|
||||
out_channels=out_ch,
|
||||
dims=dims,
|
||||
use_checkpoint=use_checkpoint,
|
||||
use_scale_shift_norm=use_scale_shift_norm,
|
||||
up=True,
|
||||
)
|
||||
if resblock_updown
|
||||
else Upsample(ch, conv_resample, dims=dims, out_channels=out_ch)
|
||||
)
|
||||
ds //= 2
|
||||
self.output_blocks.append(TimestepEmbedSequential(*layers))
|
||||
self._feature_size += ch
|
||||
|
||||
self.out = nn.Sequential(
|
||||
normalization(ch, swish=1.0),
|
||||
nn.Identity(),
|
||||
zero_module(conv_nd(dims, input_ch, out_channels, 3, padding=1)),
|
||||
)
|
||||
self.use_fp16 = use_fp16
|
||||
|
||||
def convert_to_fp16(self):
|
||||
"""
|
||||
Convert the torso of the model to float16.
|
||||
"""
|
||||
self.input_blocks.apply(convert_module_to_f16)
|
||||
self.middle_block.apply(convert_module_to_f16)
|
||||
self.output_blocks.apply(convert_module_to_f16)
|
||||
|
||||
def convert_to_fp32(self):
|
||||
"""
|
||||
Convert the torso of the model to float32.
|
||||
"""
|
||||
self.input_blocks.apply(convert_module_to_f32)
|
||||
self.middle_block.apply(convert_module_to_f32)
|
||||
self.output_blocks.apply(convert_module_to_f32)
|
||||
|
||||
def forward(self, x, timesteps, transformer_out):
|
||||
"""
|
||||
Apply the model to an input batch.
|
||||
|
||||
:param x: an [N x C x ...] Tensor of inputs.
|
||||
:param timesteps: a 1-D batch of timesteps.
|
||||
:param y: an [N] Tensor of labels, if class-conditional.
|
||||
:return: an [N x C x ...] Tensor of outputs.
|
||||
"""
|
||||
assert (y is not None) == (
|
||||
self.num_classes is not None
|
||||
), "must specify y if and only if the model is class-conditional"
|
||||
|
||||
hs = []
|
||||
emb = self.time_embed(timestep_embedding(timesteps, self.model_channels))
|
||||
|
||||
# project the last token
|
||||
transformer_proj = self.transformer_proj(transformer_out[:, -1])
|
||||
transformer_out = transformer_out.permute(0, 2, 1) # NLC -> NCL
|
||||
|
||||
h = x.type(self.dtype)
|
||||
for module in self.input_blocks:
|
||||
h = module(h, emb)
|
||||
hs.append(h)
|
||||
h = self.middle_block(h, emb)
|
||||
for module in self.output_blocks:
|
||||
h = torch.cat([h, hs.pop()], dim=1)
|
||||
h = module(h, emb)
|
||||
h = h.type(x.dtype)
|
||||
return self.out(h)
|
||||
@@ -1,536 +0,0 @@
|
||||
import numpy as np
|
||||
import torch
|
||||
import torch.nn as nn
|
||||
|
||||
from ..configuration_utils import ConfigMixin, register_to_config
|
||||
from ..modeling_utils import ModelMixin
|
||||
from .attention import AttentionBlock
|
||||
from .resnet import Downsample2D, ResnetBlock2D, Upsample2D
|
||||
|
||||
|
||||
def nonlinearity(x):
|
||||
# swish
|
||||
return x * torch.sigmoid(x)
|
||||
|
||||
|
||||
def Normalize(in_channels):
|
||||
return torch.nn.GroupNorm(num_groups=32, num_channels=in_channels, eps=1e-6, affine=True)
|
||||
|
||||
|
||||
class Encoder(nn.Module):
|
||||
def __init__(
|
||||
self,
|
||||
*,
|
||||
ch,
|
||||
ch_mult=(1, 2, 4, 8),
|
||||
num_res_blocks,
|
||||
attn_resolutions,
|
||||
dropout=0.0,
|
||||
resamp_with_conv=True,
|
||||
in_channels,
|
||||
resolution,
|
||||
z_channels,
|
||||
double_z=True,
|
||||
**ignore_kwargs,
|
||||
):
|
||||
super().__init__()
|
||||
self.ch = ch
|
||||
self.temb_ch = 0
|
||||
self.num_resolutions = len(ch_mult)
|
||||
self.num_res_blocks = num_res_blocks
|
||||
self.resolution = resolution
|
||||
self.in_channels = in_channels
|
||||
|
||||
# downsampling
|
||||
self.conv_in = torch.nn.Conv2d(in_channels, self.ch, kernel_size=3, stride=1, padding=1)
|
||||
|
||||
curr_res = resolution
|
||||
in_ch_mult = (1,) + tuple(ch_mult)
|
||||
self.down = nn.ModuleList()
|
||||
for i_level in range(self.num_resolutions):
|
||||
block = nn.ModuleList()
|
||||
attn = nn.ModuleList()
|
||||
block_in = ch * in_ch_mult[i_level]
|
||||
block_out = ch * ch_mult[i_level]
|
||||
for i_block in range(self.num_res_blocks):
|
||||
block.append(
|
||||
ResnetBlock2D(
|
||||
in_channels=block_in, out_channels=block_out, temb_channels=self.temb_ch, dropout=dropout
|
||||
)
|
||||
)
|
||||
block_in = block_out
|
||||
if curr_res in attn_resolutions:
|
||||
attn.append(AttentionBlock(block_in, overwrite_qkv=True))
|
||||
down = nn.Module()
|
||||
down.block = block
|
||||
down.attn = attn
|
||||
if i_level != self.num_resolutions - 1:
|
||||
down.downsample = Downsample2D(block_in, use_conv=resamp_with_conv, padding=0)
|
||||
curr_res = curr_res // 2
|
||||
self.down.append(down)
|
||||
|
||||
# middle
|
||||
self.mid = nn.Module()
|
||||
self.mid.block_1 = ResnetBlock2D(
|
||||
in_channels=block_in, out_channels=block_in, temb_channels=self.temb_ch, dropout=dropout
|
||||
)
|
||||
self.mid.attn_1 = AttentionBlock(block_in, overwrite_qkv=True)
|
||||
self.mid.block_2 = ResnetBlock2D(
|
||||
in_channels=block_in, out_channels=block_in, temb_channels=self.temb_ch, dropout=dropout
|
||||
)
|
||||
|
||||
# end
|
||||
self.norm_out = Normalize(block_in)
|
||||
self.conv_out = torch.nn.Conv2d(
|
||||
block_in, 2 * z_channels if double_z else z_channels, kernel_size=3, stride=1, padding=1
|
||||
)
|
||||
|
||||
def forward(self, x):
|
||||
# assert x.shape[2] == x.shape[3] == self.resolution, "{}, {}, {}".format(x.shape[2], x.shape[3], self.resolution)
|
||||
|
||||
# timestep embedding
|
||||
temb = None
|
||||
|
||||
# downsampling
|
||||
hs = [self.conv_in(x)]
|
||||
for i_level in range(self.num_resolutions):
|
||||
for i_block in range(self.num_res_blocks):
|
||||
h = self.down[i_level].block[i_block](hs[-1], temb)
|
||||
if len(self.down[i_level].attn) > 0:
|
||||
h = self.down[i_level].attn[i_block](h)
|
||||
hs.append(h)
|
||||
if i_level != self.num_resolutions - 1:
|
||||
hs.append(self.down[i_level].downsample(hs[-1]))
|
||||
|
||||
# middle
|
||||
h = hs[-1]
|
||||
h = self.mid.block_1(h, temb)
|
||||
h = self.mid.attn_1(h)
|
||||
h = self.mid.block_2(h, temb)
|
||||
|
||||
# end
|
||||
h = self.norm_out(h)
|
||||
h = nonlinearity(h)
|
||||
h = self.conv_out(h)
|
||||
return h
|
||||
|
||||
|
||||
class Decoder(nn.Module):
|
||||
def __init__(
|
||||
self,
|
||||
*,
|
||||
ch,
|
||||
out_ch,
|
||||
ch_mult=(1, 2, 4, 8),
|
||||
num_res_blocks,
|
||||
attn_resolutions,
|
||||
dropout=0.0,
|
||||
resamp_with_conv=True,
|
||||
in_channels,
|
||||
resolution,
|
||||
z_channels,
|
||||
give_pre_end=False,
|
||||
**ignorekwargs,
|
||||
):
|
||||
super().__init__()
|
||||
self.ch = ch
|
||||
self.temb_ch = 0
|
||||
self.num_resolutions = len(ch_mult)
|
||||
self.num_res_blocks = num_res_blocks
|
||||
self.resolution = resolution
|
||||
self.in_channels = in_channels
|
||||
self.give_pre_end = give_pre_end
|
||||
|
||||
# compute in_ch_mult, block_in and curr_res at lowest res
|
||||
block_in = ch * ch_mult[self.num_resolutions - 1]
|
||||
curr_res = resolution // 2 ** (self.num_resolutions - 1)
|
||||
self.z_shape = (1, z_channels, curr_res, curr_res)
|
||||
# print("Working with z of shape {} = {} dimensions.".format(self.z_shape, np.prod(self.z_shape)))
|
||||
|
||||
# z to block_in
|
||||
self.conv_in = torch.nn.Conv2d(z_channels, block_in, kernel_size=3, stride=1, padding=1)
|
||||
|
||||
# middle
|
||||
self.mid = nn.Module()
|
||||
self.mid.block_1 = ResnetBlock2D(
|
||||
in_channels=block_in, out_channels=block_in, temb_channels=self.temb_ch, dropout=dropout
|
||||
)
|
||||
self.mid.attn_1 = AttentionBlock(block_in, overwrite_qkv=True)
|
||||
self.mid.block_2 = ResnetBlock2D(
|
||||
in_channels=block_in, out_channels=block_in, temb_channels=self.temb_ch, dropout=dropout
|
||||
)
|
||||
|
||||
# upsampling
|
||||
self.up = nn.ModuleList()
|
||||
for i_level in reversed(range(self.num_resolutions)):
|
||||
block = nn.ModuleList()
|
||||
attn = nn.ModuleList()
|
||||
block_out = ch * ch_mult[i_level]
|
||||
for i_block in range(self.num_res_blocks + 1):
|
||||
block.append(
|
||||
ResnetBlock2D(
|
||||
in_channels=block_in, out_channels=block_out, temb_channels=self.temb_ch, dropout=dropout
|
||||
)
|
||||
)
|
||||
block_in = block_out
|
||||
if curr_res in attn_resolutions:
|
||||
attn.append(AttentionBlock(block_in, overwrite_qkv=True))
|
||||
up = nn.Module()
|
||||
up.block = block
|
||||
up.attn = attn
|
||||
if i_level != 0:
|
||||
up.upsample = Upsample2D(block_in, use_conv=resamp_with_conv)
|
||||
curr_res = curr_res * 2
|
||||
self.up.insert(0, up) # prepend to get consistent order
|
||||
|
||||
# end
|
||||
self.norm_out = Normalize(block_in)
|
||||
self.conv_out = torch.nn.Conv2d(block_in, out_ch, kernel_size=3, stride=1, padding=1)
|
||||
|
||||
def forward(self, z):
|
||||
# assert z.shape[1:] == self.z_shape[1:]
|
||||
self.last_z_shape = z.shape
|
||||
|
||||
# timestep embedding
|
||||
temb = None
|
||||
|
||||
# z to block_in
|
||||
h = self.conv_in(z)
|
||||
|
||||
# middle
|
||||
h = self.mid.block_1(h, temb)
|
||||
h = self.mid.attn_1(h)
|
||||
h = self.mid.block_2(h, temb)
|
||||
|
||||
# upsampling
|
||||
for i_level in reversed(range(self.num_resolutions)):
|
||||
for i_block in range(self.num_res_blocks + 1):
|
||||
h = self.up[i_level].block[i_block](h, temb)
|
||||
if len(self.up[i_level].attn) > 0:
|
||||
h = self.up[i_level].attn[i_block](h)
|
||||
if i_level != 0:
|
||||
h = self.up[i_level].upsample(h)
|
||||
|
||||
# end
|
||||
if self.give_pre_end:
|
||||
return h
|
||||
|
||||
h = self.norm_out(h)
|
||||
h = nonlinearity(h)
|
||||
h = self.conv_out(h)
|
||||
return h
|
||||
|
||||
|
||||
class VectorQuantizer(nn.Module):
|
||||
"""
|
||||
Improved version over VectorQuantizer, can be used as a drop-in replacement. Mostly avoids costly matrix
|
||||
multiplications and allows for post-hoc remapping of indices.
|
||||
"""
|
||||
|
||||
# NOTE: due to a bug the beta term was applied to the wrong term. for
|
||||
# backwards compatibility we use the buggy version by default, but you can
|
||||
# specify legacy=False to fix it.
|
||||
def __init__(self, n_e, e_dim, beta, remap=None, unknown_index="random", sane_index_shape=False, legacy=True):
|
||||
super().__init__()
|
||||
self.n_e = n_e
|
||||
self.e_dim = e_dim
|
||||
self.beta = beta
|
||||
self.legacy = legacy
|
||||
|
||||
self.embedding = nn.Embedding(self.n_e, self.e_dim)
|
||||
self.embedding.weight.data.uniform_(-1.0 / self.n_e, 1.0 / self.n_e)
|
||||
|
||||
self.remap = remap
|
||||
if self.remap is not None:
|
||||
self.register_buffer("used", torch.tensor(np.load(self.remap)))
|
||||
self.re_embed = self.used.shape[0]
|
||||
self.unknown_index = unknown_index # "random" or "extra" or integer
|
||||
if self.unknown_index == "extra":
|
||||
self.unknown_index = self.re_embed
|
||||
self.re_embed = self.re_embed + 1
|
||||
print(
|
||||
f"Remapping {self.n_e} indices to {self.re_embed} indices. "
|
||||
f"Using {self.unknown_index} for unknown indices."
|
||||
)
|
||||
else:
|
||||
self.re_embed = n_e
|
||||
|
||||
self.sane_index_shape = sane_index_shape
|
||||
|
||||
def remap_to_used(self, inds):
|
||||
ishape = inds.shape
|
||||
assert len(ishape) > 1
|
||||
inds = inds.reshape(ishape[0], -1)
|
||||
used = self.used.to(inds)
|
||||
match = (inds[:, :, None] == used[None, None, ...]).long()
|
||||
new = match.argmax(-1)
|
||||
unknown = match.sum(2) < 1
|
||||
if self.unknown_index == "random":
|
||||
new[unknown] = torch.randint(0, self.re_embed, size=new[unknown].shape).to(device=new.device)
|
||||
else:
|
||||
new[unknown] = self.unknown_index
|
||||
return new.reshape(ishape)
|
||||
|
||||
def unmap_to_all(self, inds):
|
||||
ishape = inds.shape
|
||||
assert len(ishape) > 1
|
||||
inds = inds.reshape(ishape[0], -1)
|
||||
used = self.used.to(inds)
|
||||
if self.re_embed > self.used.shape[0]: # extra token
|
||||
inds[inds >= self.used.shape[0]] = 0 # simply set to zero
|
||||
back = torch.gather(used[None, :][inds.shape[0] * [0], :], 1, inds)
|
||||
return back.reshape(ishape)
|
||||
|
||||
def forward(self, z):
|
||||
# reshape z -> (batch, height, width, channel) and flatten
|
||||
z = z.permute(0, 2, 3, 1).contiguous()
|
||||
z_flattened = z.view(-1, self.e_dim)
|
||||
# distances from z to embeddings e_j (z - e)^2 = z^2 + e^2 - 2 e * z
|
||||
|
||||
d = (
|
||||
torch.sum(z_flattened**2, dim=1, keepdim=True)
|
||||
+ torch.sum(self.embedding.weight**2, dim=1)
|
||||
- 2 * torch.einsum("bd,dn->bn", z_flattened, self.embedding.weight.t())
|
||||
)
|
||||
|
||||
min_encoding_indices = torch.argmin(d, dim=1)
|
||||
z_q = self.embedding(min_encoding_indices).view(z.shape)
|
||||
perplexity = None
|
||||
min_encodings = None
|
||||
|
||||
# compute loss for embedding
|
||||
if not self.legacy:
|
||||
loss = self.beta * torch.mean((z_q.detach() - z) ** 2) + torch.mean((z_q - z.detach()) ** 2)
|
||||
else:
|
||||
loss = torch.mean((z_q.detach() - z) ** 2) + self.beta * torch.mean((z_q - z.detach()) ** 2)
|
||||
|
||||
# preserve gradients
|
||||
z_q = z + (z_q - z).detach()
|
||||
|
||||
# reshape back to match original input shape
|
||||
z_q = z_q.permute(0, 3, 1, 2).contiguous()
|
||||
|
||||
if self.remap is not None:
|
||||
min_encoding_indices = min_encoding_indices.reshape(z.shape[0], -1) # add batch axis
|
||||
min_encoding_indices = self.remap_to_used(min_encoding_indices)
|
||||
min_encoding_indices = min_encoding_indices.reshape(-1, 1) # flatten
|
||||
|
||||
if self.sane_index_shape:
|
||||
min_encoding_indices = min_encoding_indices.reshape(z_q.shape[0], z_q.shape[2], z_q.shape[3])
|
||||
|
||||
return z_q, loss, (perplexity, min_encodings, min_encoding_indices)
|
||||
|
||||
def get_codebook_entry(self, indices, shape):
|
||||
# shape specifying (batch, height, width, channel)
|
||||
if self.remap is not None:
|
||||
indices = indices.reshape(shape[0], -1) # add batch axis
|
||||
indices = self.unmap_to_all(indices)
|
||||
indices = indices.reshape(-1) # flatten again
|
||||
|
||||
# get quantized latent vectors
|
||||
z_q = self.embedding(indices)
|
||||
|
||||
if shape is not None:
|
||||
z_q = z_q.view(shape)
|
||||
# reshape back to match original input shape
|
||||
z_q = z_q.permute(0, 3, 1, 2).contiguous()
|
||||
|
||||
return z_q
|
||||
|
||||
|
||||
class DiagonalGaussianDistribution(object):
|
||||
def __init__(self, parameters, deterministic=False):
|
||||
self.parameters = parameters
|
||||
self.mean, self.logvar = torch.chunk(parameters, 2, dim=1)
|
||||
self.logvar = torch.clamp(self.logvar, -30.0, 20.0)
|
||||
self.deterministic = deterministic
|
||||
self.std = torch.exp(0.5 * self.logvar)
|
||||
self.var = torch.exp(self.logvar)
|
||||
if self.deterministic:
|
||||
self.var = self.std = torch.zeros_like(self.mean).to(device=self.parameters.device)
|
||||
|
||||
def sample(self):
|
||||
x = self.mean + self.std * torch.randn(self.mean.shape).to(device=self.parameters.device)
|
||||
return x
|
||||
|
||||
def kl(self, other=None):
|
||||
if self.deterministic:
|
||||
return torch.Tensor([0.0])
|
||||
else:
|
||||
if other is None:
|
||||
return 0.5 * torch.sum(torch.pow(self.mean, 2) + self.var - 1.0 - self.logvar, dim=[1, 2, 3])
|
||||
else:
|
||||
return 0.5 * torch.sum(
|
||||
torch.pow(self.mean - other.mean, 2) / other.var
|
||||
+ self.var / other.var
|
||||
- 1.0
|
||||
- self.logvar
|
||||
+ other.logvar,
|
||||
dim=[1, 2, 3],
|
||||
)
|
||||
|
||||
def nll(self, sample, dims=[1, 2, 3]):
|
||||
if self.deterministic:
|
||||
return torch.Tensor([0.0])
|
||||
logtwopi = np.log(2.0 * np.pi)
|
||||
return 0.5 * torch.sum(logtwopi + self.logvar + torch.pow(sample - self.mean, 2) / self.var, dim=dims)
|
||||
|
||||
def mode(self):
|
||||
return self.mean
|
||||
|
||||
|
||||
class VQModel(ModelMixin, ConfigMixin):
|
||||
@register_to_config
|
||||
def __init__(
|
||||
self,
|
||||
ch,
|
||||
out_ch,
|
||||
num_res_blocks,
|
||||
attn_resolutions,
|
||||
in_channels,
|
||||
resolution,
|
||||
z_channels,
|
||||
n_embed,
|
||||
embed_dim,
|
||||
remap=None,
|
||||
sane_index_shape=False, # tell vector quantizer to return indices as bhw
|
||||
ch_mult=(1, 2, 4, 8),
|
||||
dropout=0.0,
|
||||
double_z=True,
|
||||
resamp_with_conv=True,
|
||||
give_pre_end=False,
|
||||
):
|
||||
super().__init__()
|
||||
|
||||
# pass init params to Encoder
|
||||
self.encoder = Encoder(
|
||||
ch=ch,
|
||||
num_res_blocks=num_res_blocks,
|
||||
attn_resolutions=attn_resolutions,
|
||||
in_channels=in_channels,
|
||||
resolution=resolution,
|
||||
z_channels=z_channels,
|
||||
ch_mult=ch_mult,
|
||||
dropout=dropout,
|
||||
resamp_with_conv=resamp_with_conv,
|
||||
double_z=double_z,
|
||||
give_pre_end=give_pre_end,
|
||||
)
|
||||
|
||||
self.quant_conv = torch.nn.Conv2d(z_channels, embed_dim, 1)
|
||||
self.quantize = VectorQuantizer(n_embed, embed_dim, beta=0.25, remap=remap, sane_index_shape=sane_index_shape)
|
||||
self.post_quant_conv = torch.nn.Conv2d(embed_dim, z_channels, 1)
|
||||
|
||||
# pass init params to Decoder
|
||||
self.decoder = Decoder(
|
||||
ch=ch,
|
||||
out_ch=out_ch,
|
||||
num_res_blocks=num_res_blocks,
|
||||
attn_resolutions=attn_resolutions,
|
||||
in_channels=in_channels,
|
||||
resolution=resolution,
|
||||
z_channels=z_channels,
|
||||
ch_mult=ch_mult,
|
||||
dropout=dropout,
|
||||
resamp_with_conv=resamp_with_conv,
|
||||
give_pre_end=give_pre_end,
|
||||
)
|
||||
|
||||
def encode(self, x):
|
||||
h = self.encoder(x)
|
||||
h = self.quant_conv(h)
|
||||
return h
|
||||
|
||||
def decode(self, h, force_not_quantize=False):
|
||||
# also go through quantization layer
|
||||
if not force_not_quantize:
|
||||
quant, emb_loss, info = self.quantize(h)
|
||||
else:
|
||||
quant = h
|
||||
quant = self.post_quant_conv(quant)
|
||||
dec = self.decoder(quant)
|
||||
return dec
|
||||
|
||||
def forward(self, sample):
|
||||
x = sample
|
||||
h = self.encode(x)
|
||||
dec = self.decode(h)
|
||||
return dec
|
||||
|
||||
|
||||
class AutoencoderKL(ModelMixin, ConfigMixin):
|
||||
@register_to_config
|
||||
def __init__(
|
||||
self,
|
||||
ch,
|
||||
out_ch,
|
||||
num_res_blocks,
|
||||
attn_resolutions,
|
||||
in_channels,
|
||||
resolution,
|
||||
z_channels,
|
||||
embed_dim,
|
||||
remap=None,
|
||||
sane_index_shape=False, # tell vector quantizer to return indices as bhw
|
||||
ch_mult=(1, 2, 4, 8),
|
||||
dropout=0.0,
|
||||
double_z=True,
|
||||
resamp_with_conv=True,
|
||||
give_pre_end=False,
|
||||
):
|
||||
super().__init__()
|
||||
|
||||
# pass init params to Encoder
|
||||
self.encoder = Encoder(
|
||||
ch=ch,
|
||||
out_ch=out_ch,
|
||||
num_res_blocks=num_res_blocks,
|
||||
attn_resolutions=attn_resolutions,
|
||||
in_channels=in_channels,
|
||||
resolution=resolution,
|
||||
z_channels=z_channels,
|
||||
ch_mult=ch_mult,
|
||||
dropout=dropout,
|
||||
resamp_with_conv=resamp_with_conv,
|
||||
double_z=double_z,
|
||||
give_pre_end=give_pre_end,
|
||||
)
|
||||
|
||||
# pass init params to Decoder
|
||||
self.decoder = Decoder(
|
||||
ch=ch,
|
||||
out_ch=out_ch,
|
||||
num_res_blocks=num_res_blocks,
|
||||
attn_resolutions=attn_resolutions,
|
||||
in_channels=in_channels,
|
||||
resolution=resolution,
|
||||
z_channels=z_channels,
|
||||
ch_mult=ch_mult,
|
||||
dropout=dropout,
|
||||
resamp_with_conv=resamp_with_conv,
|
||||
give_pre_end=give_pre_end,
|
||||
)
|
||||
|
||||
self.quant_conv = torch.nn.Conv2d(2 * z_channels, 2 * embed_dim, 1)
|
||||
self.post_quant_conv = torch.nn.Conv2d(embed_dim, z_channels, 1)
|
||||
|
||||
def encode(self, x):
|
||||
h = self.encoder(x)
|
||||
moments = self.quant_conv(h)
|
||||
posterior = DiagonalGaussianDistribution(moments)
|
||||
return posterior
|
||||
|
||||
def decode(self, z):
|
||||
z = self.post_quant_conv(z)
|
||||
dec = self.decoder(z)
|
||||
return dec
|
||||
|
||||
def forward(self, sample, sample_posterior=False):
|
||||
x = sample
|
||||
posterior = self.encode(x)
|
||||
if sample_posterior:
|
||||
z = posterior.sample()
|
||||
else:
|
||||
z = posterior.mode()
|
||||
dec = self.decode(z)
|
||||
return dec
|
||||
@@ -1,276 +0,0 @@
|
||||
# coding=utf-8
|
||||
# Copyright 2022 The HuggingFace Inc. team.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
"""PyTorch optimization for diffusion models."""
|
||||
|
||||
import math
|
||||
from enum import Enum
|
||||
from typing import Optional, Union
|
||||
|
||||
import torch
|
||||
from torch.optim import Optimizer
|
||||
from torch.optim.lr_scheduler import LambdaLR
|
||||
|
||||
from .utils import logging
|
||||
|
||||
|
||||
logger = logging.get_logger(__name__)
|
||||
|
||||
|
||||
class SchedulerType(Enum):
|
||||
LINEAR = "linear"
|
||||
COSINE = "cosine"
|
||||
COSINE_WITH_RESTARTS = "cosine_with_restarts"
|
||||
POLYNOMIAL = "polynomial"
|
||||
CONSTANT = "constant"
|
||||
CONSTANT_WITH_WARMUP = "constant_with_warmup"
|
||||
|
||||
|
||||
def get_constant_schedule(optimizer: Optimizer, last_epoch: int = -1):
|
||||
"""
|
||||
Create a schedule with a constant learning rate, using the learning rate set in optimizer.
|
||||
|
||||
Args:
|
||||
optimizer ([`~torch.optim.Optimizer`]):
|
||||
The optimizer for which to schedule the learning rate.
|
||||
last_epoch (`int`, *optional*, defaults to -1):
|
||||
The index of the last epoch when resuming training.
|
||||
|
||||
Return:
|
||||
`torch.optim.lr_scheduler.LambdaLR` with the appropriate schedule.
|
||||
"""
|
||||
return LambdaLR(optimizer, lambda _: 1, last_epoch=last_epoch)
|
||||
|
||||
|
||||
def get_constant_schedule_with_warmup(optimizer: Optimizer, num_warmup_steps: int, last_epoch: int = -1):
|
||||
"""
|
||||
Create a schedule with a constant learning rate preceded by a warmup period during which the learning rate
|
||||
increases linearly between 0 and the initial lr set in the optimizer.
|
||||
|
||||
Args:
|
||||
optimizer ([`~torch.optim.Optimizer`]):
|
||||
The optimizer for which to schedule the learning rate.
|
||||
num_warmup_steps (`int`):
|
||||
The number of steps for the warmup phase.
|
||||
last_epoch (`int`, *optional*, defaults to -1):
|
||||
The index of the last epoch when resuming training.
|
||||
|
||||
Return:
|
||||
`torch.optim.lr_scheduler.LambdaLR` with the appropriate schedule.
|
||||
"""
|
||||
|
||||
def lr_lambda(current_step: int):
|
||||
if current_step < num_warmup_steps:
|
||||
return float(current_step) / float(max(1.0, num_warmup_steps))
|
||||
return 1.0
|
||||
|
||||
return LambdaLR(optimizer, lr_lambda, last_epoch=last_epoch)
|
||||
|
||||
|
||||
def get_linear_schedule_with_warmup(optimizer, num_warmup_steps, num_training_steps, last_epoch=-1):
|
||||
"""
|
||||
Create a schedule with a learning rate that decreases linearly from the initial lr set in the optimizer to 0, after
|
||||
a warmup period during which it increases linearly from 0 to the initial lr set in the optimizer.
|
||||
|
||||
Args:
|
||||
optimizer ([`~torch.optim.Optimizer`]):
|
||||
The optimizer for which to schedule the learning rate.
|
||||
num_warmup_steps (`int`):
|
||||
The number of steps for the warmup phase.
|
||||
num_training_steps (`int`):
|
||||
The total number of training steps.
|
||||
last_epoch (`int`, *optional*, defaults to -1):
|
||||
The index of the last epoch when resuming training.
|
||||
|
||||
Return:
|
||||
`torch.optim.lr_scheduler.LambdaLR` with the appropriate schedule.
|
||||
"""
|
||||
|
||||
def lr_lambda(current_step: int):
|
||||
if current_step < num_warmup_steps:
|
||||
return float(current_step) / float(max(1, num_warmup_steps))
|
||||
return max(
|
||||
0.0, float(num_training_steps - current_step) / float(max(1, num_training_steps - num_warmup_steps))
|
||||
)
|
||||
|
||||
return LambdaLR(optimizer, lr_lambda, last_epoch)
|
||||
|
||||
|
||||
def get_cosine_schedule_with_warmup(
|
||||
optimizer: Optimizer, num_warmup_steps: int, num_training_steps: int, num_cycles: float = 0.5, last_epoch: int = -1
|
||||
):
|
||||
"""
|
||||
Create a schedule with a learning rate that decreases following the values of the cosine function between the
|
||||
initial lr set in the optimizer to 0, after a warmup period during which it increases linearly between 0 and the
|
||||
initial lr set in the optimizer.
|
||||
|
||||
Args:
|
||||
optimizer ([`~torch.optim.Optimizer`]):
|
||||
The optimizer for which to schedule the learning rate.
|
||||
num_warmup_steps (`int`):
|
||||
The number of steps for the warmup phase.
|
||||
num_training_steps (`int`):
|
||||
The total number of training steps.
|
||||
num_cycles (`float`, *optional*, defaults to 0.5):
|
||||
The number of waves in the cosine schedule (the defaults is to just decrease from the max value to 0
|
||||
following a half-cosine).
|
||||
last_epoch (`int`, *optional*, defaults to -1):
|
||||
The index of the last epoch when resuming training.
|
||||
|
||||
Return:
|
||||
`torch.optim.lr_scheduler.LambdaLR` with the appropriate schedule.
|
||||
"""
|
||||
|
||||
def lr_lambda(current_step):
|
||||
if current_step < num_warmup_steps:
|
||||
return float(current_step) / float(max(1, num_warmup_steps))
|
||||
progress = float(current_step - num_warmup_steps) / float(max(1, num_training_steps - num_warmup_steps))
|
||||
return max(0.0, 0.5 * (1.0 + math.cos(math.pi * float(num_cycles) * 2.0 * progress)))
|
||||
|
||||
return LambdaLR(optimizer, lr_lambda, last_epoch)
|
||||
|
||||
|
||||
def get_cosine_with_hard_restarts_schedule_with_warmup(
|
||||
optimizer: Optimizer, num_warmup_steps: int, num_training_steps: int, num_cycles: int = 1, last_epoch: int = -1
|
||||
):
|
||||
"""
|
||||
Create a schedule with a learning rate that decreases following the values of the cosine function between the
|
||||
initial lr set in the optimizer to 0, with several hard restarts, after a warmup period during which it increases
|
||||
linearly between 0 and the initial lr set in the optimizer.
|
||||
|
||||
Args:
|
||||
optimizer ([`~torch.optim.Optimizer`]):
|
||||
The optimizer for which to schedule the learning rate.
|
||||
num_warmup_steps (`int`):
|
||||
The number of steps for the warmup phase.
|
||||
num_training_steps (`int`):
|
||||
The total number of training steps.
|
||||
num_cycles (`int`, *optional*, defaults to 1):
|
||||
The number of hard restarts to use.
|
||||
last_epoch (`int`, *optional*, defaults to -1):
|
||||
The index of the last epoch when resuming training.
|
||||
|
||||
Return:
|
||||
`torch.optim.lr_scheduler.LambdaLR` with the appropriate schedule.
|
||||
"""
|
||||
|
||||
def lr_lambda(current_step):
|
||||
if current_step < num_warmup_steps:
|
||||
return float(current_step) / float(max(1, num_warmup_steps))
|
||||
progress = float(current_step - num_warmup_steps) / float(max(1, num_training_steps - num_warmup_steps))
|
||||
if progress >= 1.0:
|
||||
return 0.0
|
||||
return max(0.0, 0.5 * (1.0 + math.cos(math.pi * ((float(num_cycles) * progress) % 1.0))))
|
||||
|
||||
return LambdaLR(optimizer, lr_lambda, last_epoch)
|
||||
|
||||
|
||||
def get_polynomial_decay_schedule_with_warmup(
|
||||
optimizer, num_warmup_steps, num_training_steps, lr_end=1e-7, power=1.0, last_epoch=-1
|
||||
):
|
||||
"""
|
||||
Create a schedule with a learning rate that decreases as a polynomial decay from the initial lr set in the
|
||||
optimizer to end lr defined by *lr_end*, after a warmup period during which it increases linearly from 0 to the
|
||||
initial lr set in the optimizer.
|
||||
|
||||
Args:
|
||||
optimizer ([`~torch.optim.Optimizer`]):
|
||||
The optimizer for which to schedule the learning rate.
|
||||
num_warmup_steps (`int`):
|
||||
The number of steps for the warmup phase.
|
||||
num_training_steps (`int`):
|
||||
The total number of training steps.
|
||||
lr_end (`float`, *optional*, defaults to 1e-7):
|
||||
The end LR.
|
||||
power (`float`, *optional*, defaults to 1.0):
|
||||
Power factor.
|
||||
last_epoch (`int`, *optional*, defaults to -1):
|
||||
The index of the last epoch when resuming training.
|
||||
|
||||
Note: *power* defaults to 1.0 as in the fairseq implementation, which in turn is based on the original BERT
|
||||
implementation at
|
||||
https://github.com/google-research/bert/blob/f39e881b169b9d53bea03d2d341b31707a6c052b/optimization.py#L37
|
||||
|
||||
Return:
|
||||
`torch.optim.lr_scheduler.LambdaLR` with the appropriate schedule.
|
||||
|
||||
"""
|
||||
|
||||
lr_init = optimizer.defaults["lr"]
|
||||
if not (lr_init > lr_end):
|
||||
raise ValueError(f"lr_end ({lr_end}) must be be smaller than initial lr ({lr_init})")
|
||||
|
||||
def lr_lambda(current_step: int):
|
||||
if current_step < num_warmup_steps:
|
||||
return float(current_step) / float(max(1, num_warmup_steps))
|
||||
elif current_step > num_training_steps:
|
||||
return lr_end / lr_init # as LambdaLR multiplies by lr_init
|
||||
else:
|
||||
lr_range = lr_init - lr_end
|
||||
decay_steps = num_training_steps - num_warmup_steps
|
||||
pct_remaining = 1 - (current_step - num_warmup_steps) / decay_steps
|
||||
decay = lr_range * pct_remaining**power + lr_end
|
||||
return decay / lr_init # as LambdaLR multiplies by lr_init
|
||||
|
||||
return LambdaLR(optimizer, lr_lambda, last_epoch)
|
||||
|
||||
|
||||
TYPE_TO_SCHEDULER_FUNCTION = {
|
||||
SchedulerType.LINEAR: get_linear_schedule_with_warmup,
|
||||
SchedulerType.COSINE: get_cosine_schedule_with_warmup,
|
||||
SchedulerType.COSINE_WITH_RESTARTS: get_cosine_with_hard_restarts_schedule_with_warmup,
|
||||
SchedulerType.POLYNOMIAL: get_polynomial_decay_schedule_with_warmup,
|
||||
SchedulerType.CONSTANT: get_constant_schedule,
|
||||
SchedulerType.CONSTANT_WITH_WARMUP: get_constant_schedule_with_warmup,
|
||||
}
|
||||
|
||||
|
||||
def get_scheduler(
|
||||
name: Union[str, SchedulerType],
|
||||
optimizer: Optimizer,
|
||||
num_warmup_steps: Optional[int] = None,
|
||||
num_training_steps: Optional[int] = None,
|
||||
):
|
||||
"""
|
||||
Unified API to get any scheduler from its name.
|
||||
|
||||
Args:
|
||||
name (`str` or `SchedulerType`):
|
||||
The name of the scheduler to use.
|
||||
optimizer (`torch.optim.Optimizer`):
|
||||
The optimizer that will be used during training.
|
||||
num_warmup_steps (`int`, *optional*):
|
||||
The number of warmup steps to do. This is not required by all schedulers (hence the argument being
|
||||
optional), the function will raise an error if it's unset and the scheduler type requires it.
|
||||
num_training_steps (`int``, *optional*):
|
||||
The number of training steps to do. This is not required by all schedulers (hence the argument being
|
||||
optional), the function will raise an error if it's unset and the scheduler type requires it.
|
||||
"""
|
||||
name = SchedulerType(name)
|
||||
schedule_func = TYPE_TO_SCHEDULER_FUNCTION[name]
|
||||
if name == SchedulerType.CONSTANT:
|
||||
return schedule_func(optimizer)
|
||||
|
||||
# All other schedulers require `num_warmup_steps`
|
||||
if num_warmup_steps is None:
|
||||
raise ValueError(f"{name} requires `num_warmup_steps`, please provide that argument.")
|
||||
|
||||
if name == SchedulerType.CONSTANT_WITH_WARMUP:
|
||||
return schedule_func(optimizer, num_warmup_steps=num_warmup_steps)
|
||||
|
||||
# All other schedulers require `num_training_steps`
|
||||
if num_training_steps is None:
|
||||
raise ValueError(f"{name} requires `num_training_steps`, please provide that argument.")
|
||||
|
||||
return schedule_func(optimizer, num_warmup_steps=num_warmup_steps, num_training_steps=num_training_steps)
|
||||
@@ -17,15 +17,16 @@
|
||||
import importlib
|
||||
import os
|
||||
from typing import Optional, Union
|
||||
|
||||
from huggingface_hub import snapshot_download
|
||||
from PIL import Image
|
||||
|
||||
# CHANGE to diffusers.utils
|
||||
from transformers.utils import logging
|
||||
|
||||
from .configuration_utils import ConfigMixin
|
||||
from .utils import DIFFUSERS_CACHE, logging
|
||||
from .dynamic_modules_utils import get_class_from_dynamic_module
|
||||
|
||||
|
||||
INDEX_FILE = "diffusion_pytorch_model.bin"
|
||||
INDEX_FILE = "diffusion_model.pt"
|
||||
|
||||
|
||||
logger = logging.get_logger(__name__)
|
||||
@@ -34,142 +35,96 @@ logger = logging.get_logger(__name__)
|
||||
LOADABLE_CLASSES = {
|
||||
"diffusers": {
|
||||
"ModelMixin": ["save_pretrained", "from_pretrained"],
|
||||
"SchedulerMixin": ["save_config", "from_config"],
|
||||
"DiffusionPipeline": ["save_pretrained", "from_pretrained"],
|
||||
"GaussianDDPMScheduler": ["save_config", "from_config"],
|
||||
},
|
||||
"transformers": {
|
||||
"PreTrainedTokenizer": ["save_pretrained", "from_pretrained"],
|
||||
"PreTrainedTokenizerFast": ["save_pretrained", "from_pretrained"],
|
||||
"PreTrainedModel": ["save_pretrained", "from_pretrained"],
|
||||
"ModelMixin": ["save_pretrained", "from_pretrained"],
|
||||
},
|
||||
}
|
||||
|
||||
ALL_IMPORTABLE_CLASSES = {}
|
||||
for library in LOADABLE_CLASSES:
|
||||
ALL_IMPORTABLE_CLASSES.update(LOADABLE_CLASSES[library])
|
||||
|
||||
|
||||
class DiffusionPipeline(ConfigMixin):
|
||||
|
||||
config_name = "model_index.json"
|
||||
|
||||
def register_modules(self, **kwargs):
|
||||
# import it here to avoid circular import
|
||||
from diffusers import pipelines
|
||||
|
||||
for name, module in kwargs.items():
|
||||
# retrive library
|
||||
library = module.__module__.split(".")[0]
|
||||
|
||||
# check if the module is a pipeline module
|
||||
pipeline_file = module.__module__.split(".")[-1]
|
||||
pipeline_dir = module.__module__.split(".")[-2]
|
||||
is_pipeline_module = pipeline_file == "pipeline_" + pipeline_dir and hasattr(pipelines, pipeline_dir)
|
||||
|
||||
# if library is not in LOADABLE_CLASSES, then it is a custom module.
|
||||
# Or if it's a pipeline module, then the module is inside the pipeline
|
||||
# folder so we set the library to module name.
|
||||
if library not in LOADABLE_CLASSES or is_pipeline_module:
|
||||
library = pipeline_dir
|
||||
|
||||
# retrive class_name
|
||||
class_name = module.__class__.__name__
|
||||
|
||||
register_dict = {name: (library, class_name)}
|
||||
|
||||
|
||||
# save model index config
|
||||
self.register_to_config(**register_dict)
|
||||
self.register(**register_dict)
|
||||
|
||||
# set models
|
||||
setattr(self, name, module)
|
||||
|
||||
register_dict = {"_module" : self.__module__.split(".")[-1] + ".py"}
|
||||
self.register(**register_dict)
|
||||
|
||||
def save_pretrained(self, save_directory: Union[str, os.PathLike]):
|
||||
self.save_config(save_directory)
|
||||
|
||||
model_index_dict = dict(self.config)
|
||||
model_index_dict = self._dict_to_save
|
||||
model_index_dict.pop("_class_name")
|
||||
model_index_dict.pop("_diffusers_version")
|
||||
model_index_dict.pop("_module", None)
|
||||
model_index_dict.pop("_module")
|
||||
|
||||
for pipeline_component_name in model_index_dict.keys():
|
||||
sub_model = getattr(self, pipeline_component_name)
|
||||
model_cls = sub_model.__class__
|
||||
for name, (library_name, class_name) in self._dict_to_save.items():
|
||||
importable_classes = LOADABLE_CLASSES[library_name]
|
||||
|
||||
# TODO: Suraj
|
||||
if library_name == self.__module__:
|
||||
library_name = self
|
||||
|
||||
library = importlib.import_module(library_name)
|
||||
class_obj = getattr(library, class_name)
|
||||
class_candidates = {c: getattr(library, c) for c in importable_classes.keys()}
|
||||
|
||||
save_method_name = None
|
||||
# search for the model's base class in LOADABLE_CLASSES
|
||||
for library_name, library_classes in LOADABLE_CLASSES.items():
|
||||
library = importlib.import_module(library_name)
|
||||
for base_class, save_load_methods in library_classes.items():
|
||||
class_candidate = getattr(library, base_class)
|
||||
if issubclass(model_cls, class_candidate):
|
||||
# if we found a suitable base class in LOADABLE_CLASSES then grab its save method
|
||||
save_method_name = save_load_methods[0]
|
||||
break
|
||||
if save_method_name is not None:
|
||||
break
|
||||
for class_name, class_candidate in class_candidates.items():
|
||||
if issubclass(class_obj, class_candidate):
|
||||
save_method_name = importable_classes[class_name][0]
|
||||
|
||||
save_method = getattr(sub_model, save_method_name)
|
||||
save_method(os.path.join(save_directory, pipeline_component_name))
|
||||
save_method = getattr(getattr(self, name), save_method_name)
|
||||
save_method(os.path.join(save_directory, name))
|
||||
|
||||
@classmethod
|
||||
def from_pretrained(cls, pretrained_model_name_or_path: Optional[Union[str, os.PathLike]], **kwargs):
|
||||
r"""
|
||||
Add docstrings
|
||||
"""
|
||||
cache_dir = kwargs.pop("cache_dir", DIFFUSERS_CACHE)
|
||||
resume_download = kwargs.pop("resume_download", False)
|
||||
proxies = kwargs.pop("proxies", None)
|
||||
local_files_only = kwargs.pop("local_files_only", False)
|
||||
use_auth_token = kwargs.pop("use_auth_token", None)
|
||||
revision = kwargs.pop("revision", None)
|
||||
|
||||
# 1. Download the checkpoints and configs
|
||||
# use snapshot download here to get it working from from_pretrained
|
||||
if not os.path.isdir(pretrained_model_name_or_path):
|
||||
cached_folder = snapshot_download(
|
||||
pretrained_model_name_or_path,
|
||||
cache_dir=cache_dir,
|
||||
resume_download=resume_download,
|
||||
proxies=proxies,
|
||||
local_files_only=local_files_only,
|
||||
use_auth_token=use_auth_token,
|
||||
revision=revision,
|
||||
)
|
||||
cached_folder = snapshot_download(pretrained_model_name_or_path)
|
||||
else:
|
||||
cached_folder = pretrained_model_name_or_path
|
||||
|
||||
config_dict = cls.get_config_dict(cached_folder)
|
||||
|
||||
# 2. Load the pipeline class, if using custom module then load it from the hub
|
||||
# if we load from explicit class, let's use it
|
||||
if cls != DiffusionPipeline:
|
||||
|
||||
module = config_dict["_module"]
|
||||
class_name_ = config_dict["_class_name"]
|
||||
|
||||
if class_name_ == cls.__name__:
|
||||
pipeline_class = cls
|
||||
else:
|
||||
diffusers_module = importlib.import_module(cls.__module__.split(".")[0])
|
||||
pipeline_class = getattr(diffusers_module, config_dict["_class_name"])
|
||||
pipeline_class = get_class_from_dynamic_module(cached_folder, module, class_name_, cached_folder)
|
||||
|
||||
|
||||
init_dict, _ = pipeline_class.extract_init_dict(config_dict, **kwargs)
|
||||
|
||||
init_kwargs = {}
|
||||
|
||||
# import it here to avoid circular import
|
||||
from diffusers import pipelines
|
||||
|
||||
# 3. Load each module in the pipeline
|
||||
for name, (library_name, class_name) in init_dict.items():
|
||||
is_pipeline_module = hasattr(pipelines, library_name)
|
||||
# if the model is in a pipeline module, then we load it from the pipeline
|
||||
if is_pipeline_module:
|
||||
pipeline_module = getattr(pipelines, library_name)
|
||||
class_obj = getattr(pipeline_module, class_name)
|
||||
importable_classes = ALL_IMPORTABLE_CLASSES
|
||||
class_candidates = {c: class_obj for c in importable_classes.keys()}
|
||||
else:
|
||||
# else we just import it from the library.
|
||||
library = importlib.import_module(library_name)
|
||||
class_obj = getattr(library, class_name)
|
||||
importable_classes = LOADABLE_CLASSES[library_name]
|
||||
class_candidates = {c: getattr(library, c) for c in importable_classes.keys()}
|
||||
importable_classes = LOADABLE_CLASSES[library_name]
|
||||
|
||||
if library_name == module:
|
||||
# TODO(Suraj)
|
||||
pass
|
||||
|
||||
library = importlib.import_module(library_name)
|
||||
class_obj = getattr(library, class_name)
|
||||
class_candidates = {c: getattr(library, c) for c in importable_classes.keys()}
|
||||
|
||||
load_method_name = None
|
||||
for class_name, class_candidate in class_candidates.items():
|
||||
@@ -178,27 +133,12 @@ class DiffusionPipeline(ConfigMixin):
|
||||
|
||||
load_method = getattr(class_obj, load_method_name)
|
||||
|
||||
# check if the module is in a subdirectory
|
||||
if os.path.isdir(os.path.join(cached_folder, name)):
|
||||
loaded_sub_model = load_method(os.path.join(cached_folder, name))
|
||||
else:
|
||||
# else load from the root directory
|
||||
loaded_sub_model = load_method(cached_folder)
|
||||
|
||||
init_kwargs[name] = loaded_sub_model # UNet(...), # DiffusionSchedule(...)
|
||||
|
||||
# 5. Instantiate the pipeline
|
||||
model = pipeline_class(**init_kwargs)
|
||||
return model
|
||||
|
||||
@staticmethod
|
||||
def numpy_to_pil(images):
|
||||
"""
|
||||
Convert a numpy image or a batch of images to a PIL image.
|
||||
"""
|
||||
if images.ndim == 3:
|
||||
images = images[None, ...]
|
||||
images = (images * 255).round().astype("uint8")
|
||||
pil_images = [Image.fromarray(image) for image in images]
|
||||
|
||||
return pil_images
|
||||
|
||||
@@ -1,19 +0,0 @@
|
||||
# Pipelines
|
||||
|
||||
- Pipelines are a collection of end-to-end diffusion systems that can be used out-of-the-box
|
||||
- Pipelines should stay as close as possible to their original implementation
|
||||
- Pipelines can include components of other library, such as text-encoders.
|
||||
|
||||
## API
|
||||
|
||||
TODO(Patrick, Anton, Suraj)
|
||||
|
||||
## Examples
|
||||
|
||||
- DDPM for unconditional image generation in [pipeline_ddpm](https://github.com/huggingface/diffusers/blob/main/src/diffusers/pipelines/pipeline_ddpm.py).
|
||||
- DDIM for unconditional image generation in [pipeline_ddim](https://github.com/huggingface/diffusers/blob/main/src/diffusers/pipelines/pipeline_ddim.py).
|
||||
- PNDM for unconditional image generation in [pipeline_pndm](https://github.com/huggingface/diffusers/blob/main/src/diffusers/pipelines/pipeline_pndm.py).
|
||||
- Latent diffusion for text to image generation / conditional image generation in [pipeline_latent_diffusion](https://github.com/huggingface/diffusers/blob/main/src/diffusers/pipelines/pipeline_latent_diffusion.py).
|
||||
- Glide for text to image generation / conditional image generation in [pipeline_glide](https://github.com/huggingface/diffusers/blob/main/src/diffusers/pipelines/pipeline_glide.py).
|
||||
- BDDMPipeline for spectrogram-to-sound vocoding in [pipeline_bddm](https://github.com/huggingface/diffusers/blob/main/src/diffusers/pipelines/pipeline_bddm.py).
|
||||
- Grad-TTS for text to audio generation / conditional audio generation in [pipeline_grad_tts](https://github.com/huggingface/diffusers/blob/main/src/diffusers/pipelines/pipeline_grad_tts.py).
|
||||
@@ -1,10 +0,0 @@
|
||||
from ..utils import is_inflect_available, is_transformers_available, is_unidecode_available
|
||||
from .ddim import DDIMPipeline
|
||||
from .ddpm import DDPMPipeline
|
||||
from .latent_diffusion_uncond import LDMPipeline
|
||||
from .pndm import PNDMPipeline
|
||||
from .score_sde_ve import ScoreSdeVePipeline
|
||||
|
||||
|
||||
if is_transformers_available():
|
||||
from .latent_diffusion import LDMTextToImagePipeline
|
||||
@@ -1 +0,0 @@
|
||||
from .pipeline_ddim import DDIMPipeline
|
||||
@@ -1,63 +0,0 @@
|
||||
# Copyright 2022 The HuggingFace Team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
|
||||
# limitations under the License.
|
||||
|
||||
|
||||
import torch
|
||||
|
||||
from tqdm.auto import tqdm
|
||||
|
||||
from ...pipeline_utils import DiffusionPipeline
|
||||
|
||||
|
||||
class DDIMPipeline(DiffusionPipeline):
|
||||
def __init__(self, unet, scheduler):
|
||||
super().__init__()
|
||||
scheduler = scheduler.set_format("pt")
|
||||
self.register_modules(unet=unet, scheduler=scheduler)
|
||||
|
||||
@torch.no_grad()
|
||||
def __call__(
|
||||
self, batch_size=1, generator=None, torch_device=None, eta=0.0, num_inference_steps=50, output_type="pil"
|
||||
):
|
||||
# eta corresponds to η in paper and should be between [0, 1]
|
||||
if torch_device is None:
|
||||
torch_device = "cuda" if torch.cuda.is_available() else "cpu"
|
||||
|
||||
self.unet.to(torch_device)
|
||||
|
||||
# Sample gaussian noise to begin loop
|
||||
image = torch.randn(
|
||||
(batch_size, self.unet.in_channels, self.unet.sample_size, self.unet.sample_size),
|
||||
generator=generator,
|
||||
)
|
||||
image = image.to(torch_device)
|
||||
|
||||
# set step values
|
||||
self.scheduler.set_timesteps(num_inference_steps)
|
||||
|
||||
for t in tqdm(self.scheduler.timesteps):
|
||||
# 1. predict noise model_output
|
||||
model_output = self.unet(image, t)["sample"]
|
||||
|
||||
# 2. predict previous mean of image x_t-1 and add variance depending on eta
|
||||
# do x_t -> x_t-1
|
||||
image = self.scheduler.step(model_output, t, image, eta)["prev_sample"]
|
||||
|
||||
image = (image / 2 + 0.5).clamp(0, 1)
|
||||
image = image.cpu().permute(0, 2, 3, 1).numpy()
|
||||
if output_type == "pil":
|
||||
image = self.numpy_to_pil(image)
|
||||
|
||||
return {"sample": image}
|
||||
@@ -1 +0,0 @@
|
||||
from .pipeline_ddpm import DDPMPipeline
|
||||
@@ -1,59 +0,0 @@
|
||||
# Copyright 2022 The HuggingFace Team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
|
||||
# limitations under the License.
|
||||
|
||||
|
||||
import torch
|
||||
|
||||
from tqdm.auto import tqdm
|
||||
|
||||
from ...pipeline_utils import DiffusionPipeline
|
||||
|
||||
|
||||
class DDPMPipeline(DiffusionPipeline):
|
||||
def __init__(self, unet, scheduler):
|
||||
super().__init__()
|
||||
scheduler = scheduler.set_format("pt")
|
||||
self.register_modules(unet=unet, scheduler=scheduler)
|
||||
|
||||
@torch.no_grad()
|
||||
def __call__(self, batch_size=1, generator=None, torch_device=None, output_type="pil"):
|
||||
if torch_device is None:
|
||||
torch_device = "cuda" if torch.cuda.is_available() else "cpu"
|
||||
|
||||
self.unet.to(torch_device)
|
||||
|
||||
# Sample gaussian noise to begin loop
|
||||
image = torch.randn(
|
||||
(batch_size, self.unet.in_channels, self.unet.sample_size, self.unet.sample_size),
|
||||
generator=generator,
|
||||
)
|
||||
image = image.to(torch_device)
|
||||
|
||||
# set step values
|
||||
self.scheduler.set_timesteps(1000)
|
||||
|
||||
for t in tqdm(self.scheduler.timesteps):
|
||||
# 1. predict noise model_output
|
||||
model_output = self.unet(image, t)["sample"]
|
||||
|
||||
# 2. compute previous image: x_t -> t_t-1
|
||||
image = self.scheduler.step(model_output, t, image)["prev_sample"]
|
||||
|
||||
image = (image / 2 + 0.5).clamp(0, 1)
|
||||
image = image.cpu().permute(0, 2, 3, 1).numpy()
|
||||
if output_type == "pil":
|
||||
image = self.numpy_to_pil(image)
|
||||
|
||||
return {"sample": image}
|
||||
@@ -1,5 +0,0 @@
|
||||
from ...utils import is_transformers_available
|
||||
|
||||
|
||||
if is_transformers_available():
|
||||
from .pipeline_latent_diffusion import LDMBertModel, LDMTextToImagePipeline
|
||||
@@ -1,622 +0,0 @@
|
||||
from typing import Optional, Tuple, Union
|
||||
|
||||
import torch
|
||||
import torch.nn as nn
|
||||
import torch.utils.checkpoint
|
||||
|
||||
from tqdm.auto import tqdm
|
||||
from transformers.activations import ACT2FN
|
||||
from transformers.configuration_utils import PretrainedConfig
|
||||
from transformers.modeling_outputs import BaseModelOutput
|
||||
from transformers.modeling_utils import PreTrainedModel
|
||||
from transformers.utils import logging
|
||||
|
||||
from ...pipeline_utils import DiffusionPipeline
|
||||
|
||||
|
||||
class LDMTextToImagePipeline(DiffusionPipeline):
|
||||
def __init__(self, vqvae, bert, tokenizer, unet, scheduler):
|
||||
super().__init__()
|
||||
scheduler = scheduler.set_format("pt")
|
||||
self.register_modules(vqvae=vqvae, bert=bert, tokenizer=tokenizer, unet=unet, scheduler=scheduler)
|
||||
|
||||
@torch.no_grad()
|
||||
def __call__(
|
||||
self,
|
||||
prompt,
|
||||
batch_size=1,
|
||||
generator=None,
|
||||
torch_device=None,
|
||||
eta=0.0,
|
||||
guidance_scale=1.0,
|
||||
num_inference_steps=50,
|
||||
output_type="pil",
|
||||
):
|
||||
# eta corresponds to η in paper and should be between [0, 1]
|
||||
|
||||
if torch_device is None:
|
||||
torch_device = "cuda" if torch.cuda.is_available() else "cpu"
|
||||
batch_size = len(prompt)
|
||||
|
||||
self.unet.to(torch_device)
|
||||
self.vqvae.to(torch_device)
|
||||
self.bert.to(torch_device)
|
||||
|
||||
# get unconditional embeddings for classifier free guidance
|
||||
if guidance_scale != 1.0:
|
||||
uncond_input = self.tokenizer([""] * batch_size, padding="max_length", max_length=77, return_tensors="pt")
|
||||
uncond_embeddings = self.bert(uncond_input.input_ids.to(torch_device))
|
||||
|
||||
# get prompt text embeddings
|
||||
text_input = self.tokenizer(prompt, padding="max_length", max_length=77, return_tensors="pt")
|
||||
text_embeddings = self.bert(text_input.input_ids.to(torch_device))
|
||||
|
||||
latents = torch.randn(
|
||||
(batch_size, self.unet.in_channels, self.unet.sample_size, self.unet.sample_size),
|
||||
generator=generator,
|
||||
)
|
||||
latents = latents.to(torch_device)
|
||||
|
||||
self.scheduler.set_timesteps(num_inference_steps)
|
||||
|
||||
for t in tqdm(self.scheduler.timesteps):
|
||||
if guidance_scale == 1.0:
|
||||
# guidance_scale of 1 means no guidance
|
||||
latents_input = latents
|
||||
context = text_embeddings
|
||||
else:
|
||||
# For classifier free guidance, we need to do two forward passes.
|
||||
# Here we concatenate the unconditional and text embeddings into a single batch
|
||||
# to avoid doing two forward passes
|
||||
latents_input = torch.cat([latents] * 2)
|
||||
context = torch.cat([uncond_embeddings, text_embeddings])
|
||||
|
||||
# predict the noise residual
|
||||
noise_pred = self.unet(latents_input, t, encoder_hidden_states=context)["sample"]
|
||||
# perform guidance
|
||||
if guidance_scale != 1.0:
|
||||
noise_pred_uncond, noise_prediction_text = noise_pred.chunk(2)
|
||||
noise_pred = noise_pred_uncond + guidance_scale * (noise_prediction_text - noise_pred_uncond)
|
||||
|
||||
# compute the previous noisy sample x_t -> x_t-1
|
||||
latents = self.scheduler.step(noise_pred, t, latents, eta)["prev_sample"]
|
||||
|
||||
# scale and decode the image latents with vae
|
||||
latents = 1 / 0.18215 * latents
|
||||
image = self.vqvae.decode(latents)
|
||||
|
||||
image = (image / 2 + 0.5).clamp(0, 1)
|
||||
image = image.cpu().permute(0, 2, 3, 1).numpy()
|
||||
if output_type == "pil":
|
||||
image = self.numpy_to_pil(image)
|
||||
|
||||
return {"sample": image}
|
||||
|
||||
|
||||
################################################################################
|
||||
# Code for the text transformer model
|
||||
################################################################################
|
||||
""" PyTorch LDMBERT model."""
|
||||
|
||||
|
||||
logger = logging.get_logger(__name__)
|
||||
|
||||
LDMBERT_PRETRAINED_MODEL_ARCHIVE_LIST = [
|
||||
"ldm-bert",
|
||||
# See all LDMBert models at https://huggingface.co/models?filter=ldmbert
|
||||
]
|
||||
|
||||
|
||||
LDMBERT_PRETRAINED_CONFIG_ARCHIVE_MAP = {
|
||||
"ldm-bert": "https://huggingface.co/ldm-bert/resolve/main/config.json",
|
||||
}
|
||||
|
||||
|
||||
""" LDMBERT model configuration"""
|
||||
|
||||
|
||||
class LDMBertConfig(PretrainedConfig):
|
||||
model_type = "ldmbert"
|
||||
keys_to_ignore_at_inference = ["past_key_values"]
|
||||
attribute_map = {"num_attention_heads": "encoder_attention_heads", "hidden_size": "d_model"}
|
||||
|
||||
def __init__(
|
||||
self,
|
||||
vocab_size=30522,
|
||||
max_position_embeddings=77,
|
||||
encoder_layers=32,
|
||||
encoder_ffn_dim=5120,
|
||||
encoder_attention_heads=8,
|
||||
head_dim=64,
|
||||
encoder_layerdrop=0.0,
|
||||
activation_function="gelu",
|
||||
d_model=1280,
|
||||
dropout=0.1,
|
||||
attention_dropout=0.0,
|
||||
activation_dropout=0.0,
|
||||
init_std=0.02,
|
||||
classifier_dropout=0.0,
|
||||
scale_embedding=False,
|
||||
use_cache=True,
|
||||
pad_token_id=0,
|
||||
**kwargs,
|
||||
):
|
||||
self.vocab_size = vocab_size
|
||||
self.max_position_embeddings = max_position_embeddings
|
||||
self.d_model = d_model
|
||||
self.encoder_ffn_dim = encoder_ffn_dim
|
||||
self.encoder_layers = encoder_layers
|
||||
self.encoder_attention_heads = encoder_attention_heads
|
||||
self.head_dim = head_dim
|
||||
self.dropout = dropout
|
||||
self.attention_dropout = attention_dropout
|
||||
self.activation_dropout = activation_dropout
|
||||
self.activation_function = activation_function
|
||||
self.init_std = init_std
|
||||
self.encoder_layerdrop = encoder_layerdrop
|
||||
self.classifier_dropout = classifier_dropout
|
||||
self.use_cache = use_cache
|
||||
self.num_hidden_layers = encoder_layers
|
||||
self.scale_embedding = scale_embedding # scale factor will be sqrt(d_model) if True
|
||||
|
||||
super().__init__(pad_token_id=pad_token_id, **kwargs)
|
||||
|
||||
|
||||
def _expand_mask(mask: torch.Tensor, dtype: torch.dtype, tgt_len: Optional[int] = None):
|
||||
"""
|
||||
Expands attention_mask from `[bsz, seq_len]` to `[bsz, 1, tgt_seq_len, src_seq_len]`.
|
||||
"""
|
||||
bsz, src_len = mask.size()
|
||||
tgt_len = tgt_len if tgt_len is not None else src_len
|
||||
|
||||
expanded_mask = mask[:, None, None, :].expand(bsz, 1, tgt_len, src_len).to(dtype)
|
||||
|
||||
inverted_mask = 1.0 - expanded_mask
|
||||
|
||||
return inverted_mask.masked_fill(inverted_mask.to(torch.bool), torch.finfo(dtype).min)
|
||||
|
||||
|
||||
# Copied from transformers.models.bart.modeling_bart.BartAttention with Bart->LDMBert
|
||||
class LDMBertAttention(nn.Module):
|
||||
"""Multi-headed attention from 'Attention Is All You Need' paper"""
|
||||
|
||||
def __init__(
|
||||
self,
|
||||
embed_dim: int,
|
||||
num_heads: int,
|
||||
head_dim: int,
|
||||
dropout: float = 0.0,
|
||||
is_decoder: bool = False,
|
||||
bias: bool = False,
|
||||
):
|
||||
super().__init__()
|
||||
self.embed_dim = embed_dim
|
||||
self.num_heads = num_heads
|
||||
self.dropout = dropout
|
||||
self.head_dim = head_dim
|
||||
self.inner_dim = head_dim * num_heads
|
||||
|
||||
self.scaling = self.head_dim**-0.5
|
||||
self.is_decoder = is_decoder
|
||||
|
||||
self.k_proj = nn.Linear(embed_dim, self.inner_dim, bias=bias)
|
||||
self.v_proj = nn.Linear(embed_dim, self.inner_dim, bias=bias)
|
||||
self.q_proj = nn.Linear(embed_dim, self.inner_dim, bias=bias)
|
||||
self.out_proj = nn.Linear(self.inner_dim, embed_dim)
|
||||
|
||||
def _shape(self, tensor: torch.Tensor, seq_len: int, bsz: int):
|
||||
return tensor.view(bsz, seq_len, self.num_heads, self.head_dim).transpose(1, 2).contiguous()
|
||||
|
||||
def forward(
|
||||
self,
|
||||
hidden_states: torch.Tensor,
|
||||
key_value_states: Optional[torch.Tensor] = None,
|
||||
past_key_value: Optional[Tuple[torch.Tensor]] = None,
|
||||
attention_mask: Optional[torch.Tensor] = None,
|
||||
layer_head_mask: Optional[torch.Tensor] = None,
|
||||
output_attentions: bool = False,
|
||||
) -> Tuple[torch.Tensor, Optional[torch.Tensor], Optional[Tuple[torch.Tensor]]]:
|
||||
"""Input shape: Batch x Time x Channel"""
|
||||
|
||||
# if key_value_states are provided this layer is used as a cross-attention layer
|
||||
# for the decoder
|
||||
is_cross_attention = key_value_states is not None
|
||||
|
||||
bsz, tgt_len, _ = hidden_states.size()
|
||||
|
||||
# get query proj
|
||||
query_states = self.q_proj(hidden_states) * self.scaling
|
||||
# get key, value proj
|
||||
if is_cross_attention and past_key_value is not None:
|
||||
# reuse k,v, cross_attentions
|
||||
key_states = past_key_value[0]
|
||||
value_states = past_key_value[1]
|
||||
elif is_cross_attention:
|
||||
# cross_attentions
|
||||
key_states = self._shape(self.k_proj(key_value_states), -1, bsz)
|
||||
value_states = self._shape(self.v_proj(key_value_states), -1, bsz)
|
||||
elif past_key_value is not None:
|
||||
# reuse k, v, self_attention
|
||||
key_states = self._shape(self.k_proj(hidden_states), -1, bsz)
|
||||
value_states = self._shape(self.v_proj(hidden_states), -1, bsz)
|
||||
key_states = torch.cat([past_key_value[0], key_states], dim=2)
|
||||
value_states = torch.cat([past_key_value[1], value_states], dim=2)
|
||||
else:
|
||||
# self_attention
|
||||
key_states = self._shape(self.k_proj(hidden_states), -1, bsz)
|
||||
value_states = self._shape(self.v_proj(hidden_states), -1, bsz)
|
||||
|
||||
if self.is_decoder:
|
||||
# if cross_attention save Tuple(torch.Tensor, torch.Tensor) of all cross attention key/value_states.
|
||||
# Further calls to cross_attention layer can then reuse all cross-attention
|
||||
# key/value_states (first "if" case)
|
||||
# if uni-directional self-attention (decoder) save Tuple(torch.Tensor, torch.Tensor) of
|
||||
# all previous decoder key/value_states. Further calls to uni-directional self-attention
|
||||
# can concat previous decoder key/value_states to current projected key/value_states (third "elif" case)
|
||||
# if encoder bi-directional self-attention `past_key_value` is always `None`
|
||||
past_key_value = (key_states, value_states)
|
||||
|
||||
proj_shape = (bsz * self.num_heads, -1, self.head_dim)
|
||||
query_states = self._shape(query_states, tgt_len, bsz).view(*proj_shape)
|
||||
key_states = key_states.view(*proj_shape)
|
||||
value_states = value_states.view(*proj_shape)
|
||||
|
||||
src_len = key_states.size(1)
|
||||
attn_weights = torch.bmm(query_states, key_states.transpose(1, 2))
|
||||
|
||||
if attn_weights.size() != (bsz * self.num_heads, tgt_len, src_len):
|
||||
raise ValueError(
|
||||
f"Attention weights should be of size {(bsz * self.num_heads, tgt_len, src_len)}, but is"
|
||||
f" {attn_weights.size()}"
|
||||
)
|
||||
|
||||
if attention_mask is not None:
|
||||
if attention_mask.size() != (bsz, 1, tgt_len, src_len):
|
||||
raise ValueError(
|
||||
f"Attention mask should be of size {(bsz, 1, tgt_len, src_len)}, but is {attention_mask.size()}"
|
||||
)
|
||||
attn_weights = attn_weights.view(bsz, self.num_heads, tgt_len, src_len) + attention_mask
|
||||
attn_weights = attn_weights.view(bsz * self.num_heads, tgt_len, src_len)
|
||||
|
||||
attn_weights = nn.functional.softmax(attn_weights, dim=-1)
|
||||
|
||||
if layer_head_mask is not None:
|
||||
if layer_head_mask.size() != (self.num_heads,):
|
||||
raise ValueError(
|
||||
f"Head mask for a single layer should be of size {(self.num_heads,)}, but is"
|
||||
f" {layer_head_mask.size()}"
|
||||
)
|
||||
attn_weights = layer_head_mask.view(1, -1, 1, 1) * attn_weights.view(bsz, self.num_heads, tgt_len, src_len)
|
||||
attn_weights = attn_weights.view(bsz * self.num_heads, tgt_len, src_len)
|
||||
|
||||
if output_attentions:
|
||||
# this operation is a bit awkward, but it's required to
|
||||
# make sure that attn_weights keeps its gradient.
|
||||
# In order to do so, attn_weights have to be reshaped
|
||||
# twice and have to be reused in the following
|
||||
attn_weights_reshaped = attn_weights.view(bsz, self.num_heads, tgt_len, src_len)
|
||||
attn_weights = attn_weights_reshaped.view(bsz * self.num_heads, tgt_len, src_len)
|
||||
else:
|
||||
attn_weights_reshaped = None
|
||||
|
||||
attn_probs = nn.functional.dropout(attn_weights, p=self.dropout, training=self.training)
|
||||
|
||||
attn_output = torch.bmm(attn_probs, value_states)
|
||||
|
||||
if attn_output.size() != (bsz * self.num_heads, tgt_len, self.head_dim):
|
||||
raise ValueError(
|
||||
f"`attn_output` should be of size {(bsz, self.num_heads, tgt_len, self.head_dim)}, but is"
|
||||
f" {attn_output.size()}"
|
||||
)
|
||||
|
||||
attn_output = attn_output.view(bsz, self.num_heads, tgt_len, self.head_dim)
|
||||
attn_output = attn_output.transpose(1, 2)
|
||||
|
||||
# Use the `embed_dim` from the config (stored in the class) rather than `hidden_state` because `attn_output` can be
|
||||
# partitioned aross GPUs when using tensor-parallelism.
|
||||
attn_output = attn_output.reshape(bsz, tgt_len, self.inner_dim)
|
||||
|
||||
attn_output = self.out_proj(attn_output)
|
||||
|
||||
return attn_output, attn_weights_reshaped, past_key_value
|
||||
|
||||
|
||||
class LDMBertEncoderLayer(nn.Module):
|
||||
def __init__(self, config: LDMBertConfig):
|
||||
super().__init__()
|
||||
self.embed_dim = config.d_model
|
||||
self.self_attn = LDMBertAttention(
|
||||
embed_dim=self.embed_dim,
|
||||
num_heads=config.encoder_attention_heads,
|
||||
head_dim=config.head_dim,
|
||||
dropout=config.attention_dropout,
|
||||
)
|
||||
self.self_attn_layer_norm = nn.LayerNorm(self.embed_dim)
|
||||
self.dropout = config.dropout
|
||||
self.activation_fn = ACT2FN[config.activation_function]
|
||||
self.activation_dropout = config.activation_dropout
|
||||
self.fc1 = nn.Linear(self.embed_dim, config.encoder_ffn_dim)
|
||||
self.fc2 = nn.Linear(config.encoder_ffn_dim, self.embed_dim)
|
||||
self.final_layer_norm = nn.LayerNorm(self.embed_dim)
|
||||
|
||||
def forward(
|
||||
self,
|
||||
hidden_states: torch.FloatTensor,
|
||||
attention_mask: torch.FloatTensor,
|
||||
layer_head_mask: torch.FloatTensor,
|
||||
output_attentions: Optional[bool] = False,
|
||||
) -> Tuple[torch.FloatTensor, Optional[torch.FloatTensor]]:
|
||||
"""
|
||||
Args:
|
||||
hidden_states (`torch.FloatTensor`): input to the layer of shape `(seq_len, batch, embed_dim)`
|
||||
attention_mask (`torch.FloatTensor`): attention mask of size
|
||||
`(batch, 1, tgt_len, src_len)` where padding elements are indicated by very large negative values.
|
||||
layer_head_mask (`torch.FloatTensor`): mask for attention heads in a given layer of size
|
||||
`(encoder_attention_heads,)`.
|
||||
output_attentions (`bool`, *optional*):
|
||||
Whether or not to return the attentions tensors of all attention layers. See `attentions` under
|
||||
returned tensors for more detail.
|
||||
"""
|
||||
residual = hidden_states
|
||||
hidden_states = self.self_attn_layer_norm(hidden_states)
|
||||
hidden_states, attn_weights, _ = self.self_attn(
|
||||
hidden_states=hidden_states,
|
||||
attention_mask=attention_mask,
|
||||
layer_head_mask=layer_head_mask,
|
||||
output_attentions=output_attentions,
|
||||
)
|
||||
hidden_states = nn.functional.dropout(hidden_states, p=self.dropout, training=self.training)
|
||||
hidden_states = residual + hidden_states
|
||||
|
||||
residual = hidden_states
|
||||
hidden_states = self.final_layer_norm(hidden_states)
|
||||
hidden_states = self.activation_fn(self.fc1(hidden_states))
|
||||
hidden_states = nn.functional.dropout(hidden_states, p=self.activation_dropout, training=self.training)
|
||||
hidden_states = self.fc2(hidden_states)
|
||||
hidden_states = nn.functional.dropout(hidden_states, p=self.dropout, training=self.training)
|
||||
hidden_states = residual + hidden_states
|
||||
|
||||
if hidden_states.dtype == torch.float16 and (
|
||||
torch.isinf(hidden_states).any() or torch.isnan(hidden_states).any()
|
||||
):
|
||||
clamp_value = torch.finfo(hidden_states.dtype).max - 1000
|
||||
hidden_states = torch.clamp(hidden_states, min=-clamp_value, max=clamp_value)
|
||||
|
||||
outputs = (hidden_states,)
|
||||
|
||||
if output_attentions:
|
||||
outputs += (attn_weights,)
|
||||
|
||||
return outputs
|
||||
|
||||
|
||||
# Copied from transformers.models.bart.modeling_bart.BartPretrainedModel with Bart->LDMBert
|
||||
class LDMBertPreTrainedModel(PreTrainedModel):
|
||||
config_class = LDMBertConfig
|
||||
base_model_prefix = "model"
|
||||
supports_gradient_checkpointing = True
|
||||
_keys_to_ignore_on_load_unexpected = [r"encoder\.version", r"decoder\.version"]
|
||||
|
||||
def _init_weights(self, module):
|
||||
std = self.config.init_std
|
||||
if isinstance(module, nn.Linear):
|
||||
module.weight.data.normal_(mean=0.0, std=std)
|
||||
if module.bias is not None:
|
||||
module.bias.data.zero_()
|
||||
elif isinstance(module, nn.Embedding):
|
||||
module.weight.data.normal_(mean=0.0, std=std)
|
||||
if module.padding_idx is not None:
|
||||
module.weight.data[module.padding_idx].zero_()
|
||||
|
||||
def _set_gradient_checkpointing(self, module, value=False):
|
||||
if isinstance(module, (LDMBertEncoder,)):
|
||||
module.gradient_checkpointing = value
|
||||
|
||||
@property
|
||||
def dummy_inputs(self):
|
||||
pad_token = self.config.pad_token_id
|
||||
input_ids = torch.tensor([[0, 6, 10, 4, 2], [0, 8, 12, 2, pad_token]], device=self.device)
|
||||
dummy_inputs = {
|
||||
"attention_mask": input_ids.ne(pad_token),
|
||||
"input_ids": input_ids,
|
||||
}
|
||||
return dummy_inputs
|
||||
|
||||
|
||||
class LDMBertEncoder(LDMBertPreTrainedModel):
|
||||
"""
|
||||
Transformer encoder consisting of *config.encoder_layers* self attention layers. Each layer is a
|
||||
[`LDMBertEncoderLayer`].
|
||||
|
||||
Args:
|
||||
config: LDMBertConfig
|
||||
embed_tokens (nn.Embedding): output embedding
|
||||
"""
|
||||
|
||||
def __init__(self, config: LDMBertConfig):
|
||||
super().__init__(config)
|
||||
|
||||
self.dropout = config.dropout
|
||||
|
||||
embed_dim = config.d_model
|
||||
self.padding_idx = config.pad_token_id
|
||||
self.max_source_positions = config.max_position_embeddings
|
||||
|
||||
self.embed_tokens = nn.Embedding(config.vocab_size, embed_dim)
|
||||
self.embed_positions = nn.Embedding(config.max_position_embeddings, embed_dim)
|
||||
self.layers = nn.ModuleList([LDMBertEncoderLayer(config) for _ in range(config.encoder_layers)])
|
||||
self.layer_norm = nn.LayerNorm(embed_dim)
|
||||
|
||||
self.gradient_checkpointing = False
|
||||
# Initialize weights and apply final processing
|
||||
self.post_init()
|
||||
|
||||
def get_input_embeddings(self):
|
||||
return self.embed_tokens
|
||||
|
||||
def set_input_embeddings(self, value):
|
||||
self.embed_tokens = value
|
||||
|
||||
def forward(
|
||||
self,
|
||||
input_ids: torch.LongTensor = None,
|
||||
attention_mask: Optional[torch.Tensor] = None,
|
||||
position_ids: Optional[torch.LongTensor] = None,
|
||||
head_mask: Optional[torch.Tensor] = None,
|
||||
inputs_embeds: Optional[torch.FloatTensor] = None,
|
||||
output_attentions: Optional[bool] = None,
|
||||
output_hidden_states: Optional[bool] = None,
|
||||
return_dict: Optional[bool] = None,
|
||||
) -> Union[Tuple, BaseModelOutput]:
|
||||
r"""
|
||||
Args:
|
||||
input_ids (`torch.LongTensor` of shape `(batch_size, sequence_length)`):
|
||||
Indices of input sequence tokens in the vocabulary. Padding will be ignored by default should you
|
||||
provide it.
|
||||
|
||||
Indices can be obtained using [`BartTokenizer`]. See [`PreTrainedTokenizer.encode`] and
|
||||
[`PreTrainedTokenizer.__call__`] for details.
|
||||
|
||||
[What are input IDs?](../glossary#input-ids)
|
||||
attention_mask (`torch.Tensor` of shape `(batch_size, sequence_length)`, *optional*):
|
||||
Mask to avoid performing attention on padding token indices. Mask values selected in `[0, 1]`:
|
||||
|
||||
- 1 for tokens that are **not masked**,
|
||||
- 0 for tokens that are **masked**.
|
||||
|
||||
[What are attention masks?](../glossary#attention-mask)
|
||||
head_mask (`torch.Tensor` of shape `(encoder_layers, encoder_attention_heads)`, *optional*):
|
||||
Mask to nullify selected heads of the attention modules. Mask values selected in `[0, 1]`:
|
||||
|
||||
- 1 indicates the head is **not masked**,
|
||||
- 0 indicates the head is **masked**.
|
||||
|
||||
inputs_embeds (`torch.FloatTensor` of shape `(batch_size, sequence_length, hidden_size)`, *optional*):
|
||||
Optionally, instead of passing `input_ids` you can choose to directly pass an embedded representation.
|
||||
This is useful if you want more control over how to convert `input_ids` indices into associated vectors
|
||||
than the model's internal embedding lookup matrix.
|
||||
output_attentions (`bool`, *optional*):
|
||||
Whether or not to return the attentions tensors of all attention layers. See `attentions` under
|
||||
returned tensors for more detail.
|
||||
output_hidden_states (`bool`, *optional*):
|
||||
Whether or not to return the hidden states of all layers. See `hidden_states` under returned tensors
|
||||
for more detail.
|
||||
return_dict (`bool`, *optional*):
|
||||
Whether or not to return a [`~utils.ModelOutput`] instead of a plain tuple.
|
||||
"""
|
||||
output_attentions = output_attentions if output_attentions is not None else self.config.output_attentions
|
||||
output_hidden_states = (
|
||||
output_hidden_states if output_hidden_states is not None else self.config.output_hidden_states
|
||||
)
|
||||
return_dict = return_dict if return_dict is not None else self.config.use_return_dict
|
||||
|
||||
# retrieve input_ids and inputs_embeds
|
||||
if input_ids is not None and inputs_embeds is not None:
|
||||
raise ValueError("You cannot specify both input_ids and inputs_embeds at the same time")
|
||||
elif input_ids is not None:
|
||||
input_shape = input_ids.size()
|
||||
input_ids = input_ids.view(-1, input_shape[-1])
|
||||
elif inputs_embeds is not None:
|
||||
input_shape = inputs_embeds.size()[:-1]
|
||||
else:
|
||||
raise ValueError("You have to specify either input_ids or inputs_embeds")
|
||||
|
||||
if inputs_embeds is None:
|
||||
inputs_embeds = self.embed_tokens(input_ids)
|
||||
|
||||
seq_len = input_shape[1]
|
||||
if position_ids is None:
|
||||
position_ids = torch.arange(seq_len, dtype=torch.long, device=inputs_embeds.device).expand((1, -1))
|
||||
embed_pos = self.embed_positions(position_ids)
|
||||
|
||||
hidden_states = inputs_embeds + embed_pos
|
||||
hidden_states = nn.functional.dropout(hidden_states, p=self.dropout, training=self.training)
|
||||
|
||||
# expand attention_mask
|
||||
if attention_mask is not None:
|
||||
# [bsz, seq_len] -> [bsz, 1, tgt_seq_len, src_seq_len]
|
||||
attention_mask = _expand_mask(attention_mask, inputs_embeds.dtype)
|
||||
|
||||
encoder_states = () if output_hidden_states else None
|
||||
all_attentions = () if output_attentions else None
|
||||
|
||||
# check if head_mask has a correct number of layers specified if desired
|
||||
if head_mask is not None:
|
||||
if head_mask.size()[0] != (len(self.layers)):
|
||||
raise ValueError(
|
||||
f"The head_mask should be specified for {len(self.layers)} layers, but it is for"
|
||||
f" {head_mask.size()[0]}."
|
||||
)
|
||||
|
||||
for idx, encoder_layer in enumerate(self.layers):
|
||||
if output_hidden_states:
|
||||
encoder_states = encoder_states + (hidden_states,)
|
||||
if self.gradient_checkpointing and self.training:
|
||||
|
||||
def create_custom_forward(module):
|
||||
def custom_forward(*inputs):
|
||||
return module(*inputs, output_attentions)
|
||||
|
||||
return custom_forward
|
||||
|
||||
layer_outputs = torch.utils.checkpoint.checkpoint(
|
||||
create_custom_forward(encoder_layer),
|
||||
hidden_states,
|
||||
attention_mask,
|
||||
(head_mask[idx] if head_mask is not None else None),
|
||||
)
|
||||
else:
|
||||
layer_outputs = encoder_layer(
|
||||
hidden_states,
|
||||
attention_mask,
|
||||
layer_head_mask=(head_mask[idx] if head_mask is not None else None),
|
||||
output_attentions=output_attentions,
|
||||
)
|
||||
|
||||
hidden_states = layer_outputs[0]
|
||||
|
||||
if output_attentions:
|
||||
all_attentions = all_attentions + (layer_outputs[1],)
|
||||
|
||||
hidden_states = self.layer_norm(hidden_states)
|
||||
|
||||
if output_hidden_states:
|
||||
encoder_states = encoder_states + (hidden_states,)
|
||||
|
||||
if not return_dict:
|
||||
return tuple(v for v in [hidden_states, encoder_states, all_attentions] if v is not None)
|
||||
return BaseModelOutput(
|
||||
last_hidden_state=hidden_states, hidden_states=encoder_states, attentions=all_attentions
|
||||
)
|
||||
|
||||
|
||||
class LDMBertModel(LDMBertPreTrainedModel):
|
||||
def __init__(self, config):
|
||||
super().__init__(config)
|
||||
self.model = LDMBertEncoder(config)
|
||||
self.to_logits = nn.Linear(config.hidden_size, config.vocab_size)
|
||||
|
||||
def forward(
|
||||
self,
|
||||
input_ids=None,
|
||||
attention_mask=None,
|
||||
position_ids=None,
|
||||
head_mask=None,
|
||||
inputs_embeds=None,
|
||||
output_attentions=None,
|
||||
output_hidden_states=None,
|
||||
return_dict=None,
|
||||
):
|
||||
|
||||
outputs = self.model(
|
||||
input_ids,
|
||||
attention_mask=attention_mask,
|
||||
position_ids=position_ids,
|
||||
head_mask=head_mask,
|
||||
inputs_embeds=inputs_embeds,
|
||||
output_attentions=output_attentions,
|
||||
output_hidden_states=output_hidden_states,
|
||||
return_dict=return_dict,
|
||||
)
|
||||
sequence_output = outputs[0]
|
||||
return sequence_output
|
||||
@@ -1 +0,0 @@
|
||||
from .pipeline_latent_diffusion_uncond import LDMPipeline
|
||||
@@ -1,48 +0,0 @@
|
||||
import torch
|
||||
|
||||
from tqdm.auto import tqdm
|
||||
|
||||
from ...pipeline_utils import DiffusionPipeline
|
||||
|
||||
|
||||
class LDMPipeline(DiffusionPipeline):
|
||||
def __init__(self, vqvae, unet, scheduler):
|
||||
super().__init__()
|
||||
scheduler = scheduler.set_format("pt")
|
||||
self.register_modules(vqvae=vqvae, unet=unet, scheduler=scheduler)
|
||||
|
||||
@torch.no_grad()
|
||||
def __call__(
|
||||
self, batch_size=1, generator=None, torch_device=None, eta=0.0, num_inference_steps=50, output_type="pil"
|
||||
):
|
||||
# eta corresponds to η in paper and should be between [0, 1]
|
||||
|
||||
if torch_device is None:
|
||||
torch_device = "cuda" if torch.cuda.is_available() else "cpu"
|
||||
|
||||
self.unet.to(torch_device)
|
||||
self.vqvae.to(torch_device)
|
||||
|
||||
latents = torch.randn(
|
||||
(batch_size, self.unet.in_channels, self.unet.sample_size, self.unet.sample_size),
|
||||
generator=generator,
|
||||
)
|
||||
latents = latents.to(torch_device)
|
||||
|
||||
self.scheduler.set_timesteps(num_inference_steps)
|
||||
|
||||
for t in tqdm(self.scheduler.timesteps):
|
||||
# predict the noise residual
|
||||
noise_prediction = self.unet(latents, t)["sample"]
|
||||
# compute the previous noisy sample x_t -> x_t-1
|
||||
latents = self.scheduler.step(noise_prediction, t, latents, eta)["prev_sample"]
|
||||
|
||||
# decode the image latents with the VAE
|
||||
image = self.vqvae.decode(latents)
|
||||
|
||||
image = (image / 2 + 0.5).clamp(0, 1)
|
||||
image = image.cpu().permute(0, 2, 3, 1).numpy()
|
||||
if output_type == "pil":
|
||||
image = self.numpy_to_pil(image)
|
||||
|
||||
return {"sample": image}
|
||||
@@ -1 +0,0 @@
|
||||
from .pipeline_pndm import PNDMPipeline
|
||||
@@ -1,57 +0,0 @@
|
||||
# Copyright 2022 The HuggingFace Team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
|
||||
# limitations under the License.
|
||||
|
||||
|
||||
import torch
|
||||
|
||||
from tqdm.auto import tqdm
|
||||
|
||||
from ...pipeline_utils import DiffusionPipeline
|
||||
|
||||
|
||||
class PNDMPipeline(DiffusionPipeline):
|
||||
def __init__(self, unet, scheduler):
|
||||
super().__init__()
|
||||
scheduler = scheduler.set_format("pt")
|
||||
self.register_modules(unet=unet, scheduler=scheduler)
|
||||
|
||||
@torch.no_grad()
|
||||
def __call__(self, batch_size=1, generator=None, torch_device=None, num_inference_steps=50, output_type="pil"):
|
||||
# For more information on the sampling method you can take a look at Algorithm 2 of
|
||||
# the official paper: https://arxiv.org/pdf/2202.09778.pdf
|
||||
if torch_device is None:
|
||||
torch_device = "cuda" if torch.cuda.is_available() else "cpu"
|
||||
|
||||
self.unet.to(torch_device)
|
||||
|
||||
# Sample gaussian noise to begin loop
|
||||
image = torch.randn(
|
||||
(batch_size, self.unet.in_channels, self.unet.sample_size, self.unet.sample_size),
|
||||
generator=generator,
|
||||
)
|
||||
image = image.to(torch_device)
|
||||
|
||||
self.scheduler.set_timesteps(num_inference_steps)
|
||||
for t in tqdm(self.scheduler.timesteps):
|
||||
model_output = self.unet(image, t)["sample"]
|
||||
|
||||
image = self.scheduler.step(model_output, t, image)["prev_sample"]
|
||||
|
||||
image = (image / 2 + 0.5).clamp(0, 1)
|
||||
image = image.cpu().permute(0, 2, 3, 1).numpy()
|
||||
if output_type == "pil":
|
||||
image = self.numpy_to_pil(image)
|
||||
|
||||
return {"sample": image}
|
||||
@@ -1 +0,0 @@
|
||||
from .pipeline_score_sde_ve import ScoreSdeVePipeline
|
||||
@@ -1,47 +0,0 @@
|
||||
#!/usr/bin/env python3
|
||||
import torch
|
||||
|
||||
from diffusers import DiffusionPipeline
|
||||
from tqdm.auto import tqdm
|
||||
|
||||
|
||||
class ScoreSdeVePipeline(DiffusionPipeline):
|
||||
def __init__(self, model, scheduler):
|
||||
super().__init__()
|
||||
self.register_modules(model=model, scheduler=scheduler)
|
||||
|
||||
@torch.no_grad()
|
||||
def __call__(self, num_inference_steps=2000, generator=None, output_type="pil"):
|
||||
device = torch.device("cuda") if torch.cuda.is_available() else torch.device("cpu")
|
||||
|
||||
img_size = self.model.config.sample_size
|
||||
shape = (1, 3, img_size, img_size)
|
||||
|
||||
model = self.model.to(device)
|
||||
|
||||
sample = torch.randn(*shape) * self.scheduler.config.sigma_max
|
||||
sample = sample.to(device)
|
||||
|
||||
self.scheduler.set_timesteps(num_inference_steps)
|
||||
self.scheduler.set_sigmas(num_inference_steps)
|
||||
|
||||
for i, t in tqdm(enumerate(self.scheduler.timesteps)):
|
||||
sigma_t = self.scheduler.sigmas[i] * torch.ones(shape[0], device=device)
|
||||
|
||||
# correction step
|
||||
for _ in range(self.scheduler.correct_steps):
|
||||
model_output = self.model(sample, sigma_t)["sample"]
|
||||
sample = self.scheduler.step_correct(model_output, sample)["prev_sample"]
|
||||
|
||||
# prediction step
|
||||
model_output = model(sample, sigma_t)["sample"]
|
||||
output = self.scheduler.step_pred(model_output, t, sample)
|
||||
|
||||
sample, sample_mean = output["prev_sample"], output["prev_sample_mean"]
|
||||
|
||||
sample = sample.clamp(0, 1)
|
||||
sample = sample.cpu().permute(0, 2, 3, 1).numpy()
|
||||
if output_type == "pil":
|
||||
sample = self.numpy_to_pil(sample)
|
||||
|
||||
return {"sample": sample}
|
||||
@@ -1,18 +0,0 @@
|
||||
# Schedulers
|
||||
|
||||
- Schedulers are the algorithms to use diffusion models in inference as well as for training. They include the noise schedules and define algorithm-specific diffusion steps.
|
||||
- Schedulers can be used interchangable between diffusion models in inference to find the preferred tradef-off between speed and generation quality.
|
||||
- Schedulers are available in numpy, but can easily be transformed into PyTorch.
|
||||
|
||||
## API
|
||||
|
||||
- Schedulers should provide one or more `def step(...)` functions that should be called iteratively to unroll the diffusion loop during
|
||||
the forward pass.
|
||||
- Schedulers should be framework-agonstic, but provide a simple functionality to convert the scheduler into a specific framework, such as PyTorch
|
||||
with a `set_format(...)` method.
|
||||
|
||||
## Examples
|
||||
|
||||
- The DDPM scheduler was proposed in [Denoising Diffusion Probabilistic Models](https://arxiv.org/abs/2006.11239) and can be found in [scheduling_ddpm.py](https://github.com/huggingface/diffusers/blob/main/src/diffusers/schedulers/scheduling_ddpm.py). An example of how to use this scheduler can be found in [pipeline_ddpm.py](https://github.com/huggingface/diffusers/blob/main/src/diffusers/pipelines/pipeline_ddpm.py).
|
||||
- The DDIM scheduler was proposed in [Denoising Diffusion Implicit Models](https://arxiv.org/abs/2010.02502) and can be found in [scheduling_ddim.py](https://github.com/huggingface/diffusers/blob/main/src/diffusers/schedulers/scheduling_ddim.py). An example of how to use this scheduler can be found in [pipeline_ddim.py](https://github.com/huggingface/diffusers/blob/main/src/diffusers/pipelines/pipeline_ddim.py).
|
||||
- The PNMD scheduler was proposed in [Pseudo Numerical Methods for Diffusion Models on Manifolds](https://arxiv.org/abs/2202.09778) and can be found in [scheduling_pndm.py](https://github.com/huggingface/diffusers/blob/main/src/diffusers/schedulers/scheduling_pndm.py). An example of how to use this scheduler can be found in [pipeline_pndm.py](https://github.com/huggingface/diffusers/blob/main/src/diffusers/pipelines/pipeline_pndm.py).
|
||||
@@ -16,9 +16,4 @@
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
from .scheduling_ddim import DDIMScheduler
|
||||
from .scheduling_ddpm import DDPMScheduler
|
||||
from .scheduling_pndm import PNDMScheduler
|
||||
from .scheduling_sde_ve import ScoreSdeVeScheduler
|
||||
from .scheduling_sde_vp import ScoreSdeVpScheduler
|
||||
from .scheduling_utils import SchedulerMixin
|
||||
from .gaussian_ddpm import GaussianDDPMScheduler
|
||||
|
||||
125
src/diffusers/schedulers/gaussian_ddpm.py
Normal file
125
src/diffusers/schedulers/gaussian_ddpm.py
Normal file
@@ -0,0 +1,125 @@
|
||||
# Copyright 2022 The HuggingFace Team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
import torch
|
||||
import math
|
||||
from torch import nn
|
||||
|
||||
from ..configuration_utils import ConfigMixin
|
||||
|
||||
|
||||
SAMPLING_CONFIG_NAME = "scheduler_config.json"
|
||||
|
||||
|
||||
def linear_beta_schedule(timesteps, beta_start, beta_end):
|
||||
return torch.linspace(beta_start, beta_end, timesteps, dtype=torch.float64)
|
||||
|
||||
|
||||
def betas_for_alpha_bar(num_diffusion_timesteps, alpha_bar, max_beta=0.999):
|
||||
"""
|
||||
Create a beta schedule that discretizes the given alpha_t_bar function,
|
||||
which defines the cumulative product of (1-beta) over time from t = [0,1].
|
||||
|
||||
:param num_diffusion_timesteps: the number of betas to produce.
|
||||
:param alpha_bar: a lambda that takes an argument t from 0 to 1 and
|
||||
produces the cumulative product of (1-beta) up to that
|
||||
part of the diffusion process.
|
||||
:param max_beta: the maximum beta to use; use values lower than 1 to
|
||||
prevent singularities.
|
||||
"""
|
||||
betas = []
|
||||
for i in range(num_diffusion_timesteps):
|
||||
t1 = i / num_diffusion_timesteps
|
||||
t2 = (i + 1) / num_diffusion_timesteps
|
||||
betas.append(min(1 - alpha_bar(t2) / alpha_bar(t1), max_beta))
|
||||
return torch.tensor(betas, dtype=torch.float64)
|
||||
|
||||
|
||||
class GaussianDDPMScheduler(nn.Module, ConfigMixin):
|
||||
|
||||
config_name = SAMPLING_CONFIG_NAME
|
||||
|
||||
def __init__(
|
||||
self,
|
||||
timesteps=1000,
|
||||
beta_start=0.0001,
|
||||
beta_end=0.02,
|
||||
beta_schedule="linear",
|
||||
variance_type="fixed_small",
|
||||
):
|
||||
super().__init__()
|
||||
self.register(
|
||||
timesteps=timesteps,
|
||||
beta_start=beta_start,
|
||||
beta_end=beta_end,
|
||||
beta_schedule=beta_schedule,
|
||||
variance_type=variance_type,
|
||||
)
|
||||
self.num_timesteps = int(timesteps)
|
||||
|
||||
if beta_schedule == "linear":
|
||||
betas = linear_beta_schedule(timesteps, beta_start=beta_start, beta_end=beta_end)
|
||||
elif beta_schedule == "squaredcos_cap_v2":
|
||||
# GLIDE cosine schedule
|
||||
betas = betas_for_alpha_bar(
|
||||
timesteps,
|
||||
lambda t: math.cos((t + 0.008) / 1.008 * math.pi / 2) ** 2,
|
||||
)
|
||||
else:
|
||||
raise NotImplementedError(f"{beta_schedule} does is not implemented for {self.__class__}")
|
||||
|
||||
alphas = 1.0 - betas
|
||||
alphas_cumprod = torch.cumprod(alphas, axis=0)
|
||||
alphas_cumprod_prev = torch.nn.functional.pad(alphas_cumprod[:-1], (1, 0), value=1.0)
|
||||
|
||||
variance = betas * (1.0 - alphas_cumprod_prev) / (1.0 - alphas_cumprod)
|
||||
|
||||
if variance_type == "fixed_small":
|
||||
log_variance = torch.log(variance.clamp(min=1e-20))
|
||||
elif variance_type == "fixed_large":
|
||||
log_variance = torch.log(torch.cat([variance[1:2], betas[1:]], dim=0))
|
||||
|
||||
self.register_buffer("betas", betas.to(torch.float32))
|
||||
self.register_buffer("alphas", alphas.to(torch.float32))
|
||||
self.register_buffer("alphas_cumprod", alphas_cumprod.to(torch.float32))
|
||||
|
||||
self.register_buffer("log_variance", log_variance.to(torch.float32))
|
||||
|
||||
def get_alpha(self, time_step):
|
||||
return self.alphas[time_step]
|
||||
|
||||
def get_beta(self, time_step):
|
||||
return self.betas[time_step]
|
||||
|
||||
def get_alpha_prod(self, time_step):
|
||||
if time_step < 0:
|
||||
return torch.tensor(1.0)
|
||||
return self.alphas_cumprod[time_step]
|
||||
|
||||
def sample_variance(self, time_step, shape, device, generator=None):
|
||||
variance = self.log_variance[time_step]
|
||||
nonzero_mask = torch.tensor([1 - (time_step == 0)], device=device).float()[None, :]
|
||||
|
||||
noise = self.sample_noise(shape, device=device, generator=generator)
|
||||
|
||||
sampled_variance = nonzero_mask * (0.5 * variance).exp()
|
||||
sampled_variance = sampled_variance * noise
|
||||
|
||||
return sampled_variance
|
||||
|
||||
def sample_noise(self, shape, device, generator=None):
|
||||
# always sample on CPU to be deterministic
|
||||
return torch.randn(shape, generator=generator).to(device)
|
||||
|
||||
def __len__(self):
|
||||
return self.num_timesteps
|
||||
@@ -1,177 +0,0 @@
|
||||
# Copyright 2022 Stanford University Team and The HuggingFace Team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
# DISCLAIMER: This code is strongly influenced by https://github.com/pesser/pytorch_diffusion
|
||||
# and https://github.com/hojonathanho/diffusion
|
||||
|
||||
import math
|
||||
from typing import Union
|
||||
|
||||
import numpy as np
|
||||
import torch
|
||||
|
||||
from ..configuration_utils import ConfigMixin, register_to_config
|
||||
from .scheduling_utils import SchedulerMixin
|
||||
|
||||
|
||||
def betas_for_alpha_bar(num_diffusion_timesteps, max_beta=0.999):
|
||||
"""
|
||||
Create a beta schedule that discretizes the given alpha_t_bar function, which defines the cumulative product of
|
||||
(1-beta) over time from t = [0,1].
|
||||
|
||||
:param num_diffusion_timesteps: the number of betas to produce. :param alpha_bar: a lambda that takes an argument t
|
||||
from 0 to 1 and
|
||||
produces the cumulative product of (1-beta) up to that part of the diffusion process.
|
||||
:param max_beta: the maximum beta to use; use values lower than 1 to
|
||||
prevent singularities.
|
||||
"""
|
||||
|
||||
def alpha_bar(time_step):
|
||||
return math.cos((time_step + 0.008) / 1.008 * math.pi / 2) ** 2
|
||||
|
||||
betas = []
|
||||
for i in range(num_diffusion_timesteps):
|
||||
t1 = i / num_diffusion_timesteps
|
||||
t2 = (i + 1) / num_diffusion_timesteps
|
||||
betas.append(min(1 - alpha_bar(t2) / alpha_bar(t1), max_beta))
|
||||
return np.array(betas, dtype=np.float32)
|
||||
|
||||
|
||||
class DDIMScheduler(SchedulerMixin, ConfigMixin):
|
||||
@register_to_config
|
||||
def __init__(
|
||||
self,
|
||||
num_train_timesteps=1000,
|
||||
beta_start=0.0001,
|
||||
beta_end=0.02,
|
||||
beta_schedule="linear",
|
||||
trained_betas=None,
|
||||
timestep_values=None,
|
||||
clip_sample=True,
|
||||
tensor_format="pt",
|
||||
):
|
||||
|
||||
if beta_schedule == "linear":
|
||||
self.betas = np.linspace(beta_start, beta_end, num_train_timesteps, dtype=np.float32)
|
||||
elif beta_schedule == "scaled_linear":
|
||||
# this schedule is very specific to the latent diffusion model.
|
||||
self.betas = np.linspace(beta_start**0.5, beta_end**0.5, num_train_timesteps, dtype=np.float32) ** 2
|
||||
elif beta_schedule == "squaredcos_cap_v2":
|
||||
# Glide cosine schedule
|
||||
self.betas = betas_for_alpha_bar(num_train_timesteps)
|
||||
else:
|
||||
raise NotImplementedError(f"{beta_schedule} does is not implemented for {self.__class__}")
|
||||
|
||||
self.alphas = 1.0 - self.betas
|
||||
self.alphas_cumprod = np.cumprod(self.alphas, axis=0)
|
||||
self.one = np.array(1.0)
|
||||
|
||||
# setable values
|
||||
self.num_inference_steps = None
|
||||
self.timesteps = np.arange(0, num_train_timesteps)[::-1].copy()
|
||||
|
||||
self.tensor_format = tensor_format
|
||||
self.set_format(tensor_format=tensor_format)
|
||||
|
||||
def _get_variance(self, timestep, prev_timestep):
|
||||
alpha_prod_t = self.alphas_cumprod[timestep]
|
||||
alpha_prod_t_prev = self.alphas_cumprod[prev_timestep] if prev_timestep >= 0 else self.one
|
||||
beta_prod_t = 1 - alpha_prod_t
|
||||
beta_prod_t_prev = 1 - alpha_prod_t_prev
|
||||
|
||||
variance = (beta_prod_t_prev / beta_prod_t) * (1 - alpha_prod_t / alpha_prod_t_prev)
|
||||
|
||||
return variance
|
||||
|
||||
def set_timesteps(self, num_inference_steps):
|
||||
self.num_inference_steps = num_inference_steps
|
||||
self.timesteps = np.arange(
|
||||
0, self.config.num_train_timesteps, self.config.num_train_timesteps // self.num_inference_steps
|
||||
)[::-1].copy()
|
||||
self.set_format(tensor_format=self.tensor_format)
|
||||
|
||||
def step(
|
||||
self,
|
||||
model_output: Union[torch.FloatTensor, np.ndarray],
|
||||
timestep: int,
|
||||
sample: Union[torch.FloatTensor, np.ndarray],
|
||||
eta: float = 0.0,
|
||||
use_clipped_model_output: bool = False,
|
||||
generator=None,
|
||||
):
|
||||
# See formulas (12) and (16) of DDIM paper https://arxiv.org/pdf/2010.02502.pdf
|
||||
# Ideally, read DDIM paper in-detail understanding
|
||||
|
||||
# Notation (<variable name> -> <name in paper>
|
||||
# - pred_noise_t -> e_theta(x_t, t)
|
||||
# - pred_original_sample -> f_theta(x_t, t) or x_0
|
||||
# - std_dev_t -> sigma_t
|
||||
# - eta -> η
|
||||
# - pred_sample_direction -> "direction pointingc to x_t"
|
||||
# - pred_prev_sample -> "x_t-1"
|
||||
|
||||
# 1. get previous step value (=t-1)
|
||||
prev_timestep = timestep - self.config.num_train_timesteps // self.num_inference_steps
|
||||
|
||||
# 2. compute alphas, betas
|
||||
alpha_prod_t = self.alphas_cumprod[timestep]
|
||||
alpha_prod_t_prev = self.alphas_cumprod[prev_timestep] if prev_timestep >= 0 else self.one
|
||||
beta_prod_t = 1 - alpha_prod_t
|
||||
|
||||
# 3. compute predicted original sample from predicted noise also called
|
||||
# "predicted x_0" of formula (12) from https://arxiv.org/pdf/2010.02502.pdf
|
||||
pred_original_sample = (sample - beta_prod_t ** (0.5) * model_output) / alpha_prod_t ** (0.5)
|
||||
|
||||
# 4. Clip "predicted x_0"
|
||||
if self.config.clip_sample:
|
||||
pred_original_sample = self.clip(pred_original_sample, -1, 1)
|
||||
|
||||
# 5. compute variance: "sigma_t(η)" -> see formula (16)
|
||||
# σ_t = sqrt((1 − α_t−1)/(1 − α_t)) * sqrt(1 − α_t/α_t−1)
|
||||
variance = self._get_variance(timestep, prev_timestep)
|
||||
std_dev_t = eta * variance ** (0.5)
|
||||
|
||||
if use_clipped_model_output:
|
||||
# the model_output is always re-derived from the clipped x_0 in Glide
|
||||
model_output = (sample - alpha_prod_t ** (0.5) * pred_original_sample) / beta_prod_t ** (0.5)
|
||||
|
||||
# 6. compute "direction pointing to x_t" of formula (12) from https://arxiv.org/pdf/2010.02502.pdf
|
||||
pred_sample_direction = (1 - alpha_prod_t_prev - std_dev_t**2) ** (0.5) * model_output
|
||||
|
||||
# 7. compute x_t without "random noise" of formula (12) from https://arxiv.org/pdf/2010.02502.pdf
|
||||
prev_sample = alpha_prod_t_prev ** (0.5) * pred_original_sample + pred_sample_direction
|
||||
|
||||
if eta > 0:
|
||||
device = model_output.device if torch.is_tensor(model_output) else "cpu"
|
||||
noise = torch.randn(model_output.shape, generator=generator).to(device)
|
||||
variance = self._get_variance(timestep, prev_timestep) ** (0.5) * eta * noise
|
||||
|
||||
if not torch.is_tensor(model_output):
|
||||
variance = variance.numpy()
|
||||
|
||||
prev_sample = prev_sample + variance
|
||||
|
||||
return {"prev_sample": prev_sample}
|
||||
|
||||
def add_noise(self, original_samples, noise, timesteps):
|
||||
sqrt_alpha_prod = self.alphas_cumprod[timesteps] ** 0.5
|
||||
sqrt_alpha_prod = self.match_shape(sqrt_alpha_prod, original_samples)
|
||||
sqrt_one_minus_alpha_prod = (1 - self.alphas_cumprod[timesteps]) ** 0.5
|
||||
sqrt_one_minus_alpha_prod = self.match_shape(sqrt_one_minus_alpha_prod, original_samples)
|
||||
|
||||
noisy_samples = sqrt_alpha_prod * original_samples + sqrt_one_minus_alpha_prod * noise
|
||||
return noisy_samples
|
||||
|
||||
def __len__(self):
|
||||
return self.config.num_train_timesteps
|
||||
@@ -1,174 +0,0 @@
|
||||
# Copyright 2022 UC Berkely Team and The HuggingFace Team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
# DISCLAIMER: This file is strongly influenced by https://github.com/ermongroup/ddim
|
||||
|
||||
import math
|
||||
from typing import Union
|
||||
|
||||
import numpy as np
|
||||
import torch
|
||||
|
||||
from ..configuration_utils import ConfigMixin, register_to_config
|
||||
from .scheduling_utils import SchedulerMixin
|
||||
|
||||
|
||||
def betas_for_alpha_bar(num_diffusion_timesteps, max_beta=0.999):
|
||||
"""
|
||||
Create a beta schedule that discretizes the given alpha_t_bar function, which defines the cumulative product of
|
||||
(1-beta) over time from t = [0,1].
|
||||
|
||||
:param num_diffusion_timesteps: the number of betas to produce. :param alpha_bar: a lambda that takes an argument t
|
||||
from 0 to 1 and
|
||||
produces the cumulative product of (1-beta) up to that part of the diffusion process.
|
||||
:param max_beta: the maximum beta to use; use values lower than 1 to
|
||||
prevent singularities.
|
||||
"""
|
||||
|
||||
def alpha_bar(time_step):
|
||||
return math.cos((time_step + 0.008) / 1.008 * math.pi / 2) ** 2
|
||||
|
||||
betas = []
|
||||
for i in range(num_diffusion_timesteps):
|
||||
t1 = i / num_diffusion_timesteps
|
||||
t2 = (i + 1) / num_diffusion_timesteps
|
||||
betas.append(min(1 - alpha_bar(t2) / alpha_bar(t1), max_beta))
|
||||
return np.array(betas, dtype=np.float32)
|
||||
|
||||
|
||||
class DDPMScheduler(SchedulerMixin, ConfigMixin):
|
||||
@register_to_config
|
||||
def __init__(
|
||||
self,
|
||||
num_train_timesteps=1000,
|
||||
beta_start=0.0001,
|
||||
beta_end=0.02,
|
||||
beta_schedule="linear",
|
||||
trained_betas=None,
|
||||
variance_type="fixed_small",
|
||||
clip_sample=True,
|
||||
tensor_format="pt",
|
||||
):
|
||||
|
||||
if trained_betas is not None:
|
||||
self.betas = np.asarray(trained_betas)
|
||||
elif beta_schedule == "linear":
|
||||
self.betas = np.linspace(beta_start, beta_end, num_train_timesteps, dtype=np.float32)
|
||||
elif beta_schedule == "squaredcos_cap_v2":
|
||||
# Glide cosine schedule
|
||||
self.betas = betas_for_alpha_bar(num_train_timesteps)
|
||||
else:
|
||||
raise NotImplementedError(f"{beta_schedule} does is not implemented for {self.__class__}")
|
||||
|
||||
self.alphas = 1.0 - self.betas
|
||||
self.alphas_cumprod = np.cumprod(self.alphas, axis=0)
|
||||
self.one = np.array(1.0)
|
||||
|
||||
# setable values
|
||||
self.num_inference_steps = None
|
||||
self.timesteps = np.arange(0, num_train_timesteps)[::-1].copy()
|
||||
|
||||
self.tensor_format = tensor_format
|
||||
self.set_format(tensor_format=tensor_format)
|
||||
|
||||
def set_timesteps(self, num_inference_steps):
|
||||
num_inference_steps = min(self.config.num_train_timesteps, num_inference_steps)
|
||||
self.num_inference_steps = num_inference_steps
|
||||
self.timesteps = np.arange(
|
||||
0, self.config.num_train_timesteps, self.config.num_train_timesteps // self.num_inference_steps
|
||||
)[::-1].copy()
|
||||
self.set_format(tensor_format=self.tensor_format)
|
||||
|
||||
def _get_variance(self, t, variance_type=None):
|
||||
alpha_prod_t = self.alphas_cumprod[t]
|
||||
alpha_prod_t_prev = self.alphas_cumprod[t - 1] if t > 0 else self.one
|
||||
|
||||
# For t > 0, compute predicted variance βt (see formula (6) and (7) from https://arxiv.org/pdf/2006.11239.pdf)
|
||||
# and sample from it to get previous sample
|
||||
# x_{t-1} ~ N(pred_prev_sample, variance) == add variance to pred_sample
|
||||
variance = (1 - alpha_prod_t_prev) / (1 - alpha_prod_t) * self.betas[t]
|
||||
|
||||
if variance_type is None:
|
||||
variance_type = self.config.variance_type
|
||||
|
||||
# hacks - were probs added for training stability
|
||||
if variance_type == "fixed_small":
|
||||
variance = self.clip(variance, min_value=1e-20)
|
||||
# for rl-diffuser https://arxiv.org/abs/2205.09991
|
||||
elif variance_type == "fixed_small_log":
|
||||
variance = self.log(self.clip(variance, min_value=1e-20))
|
||||
elif variance_type == "fixed_large":
|
||||
variance = self.betas[t]
|
||||
elif variance_type == "fixed_large_log":
|
||||
# Glide max_log
|
||||
variance = self.log(self.betas[t])
|
||||
|
||||
return variance
|
||||
|
||||
def step(
|
||||
self,
|
||||
model_output: Union[torch.FloatTensor, np.ndarray],
|
||||
timestep: int,
|
||||
sample: Union[torch.FloatTensor, np.ndarray],
|
||||
predict_epsilon=True,
|
||||
generator=None,
|
||||
):
|
||||
t = timestep
|
||||
# 1. compute alphas, betas
|
||||
alpha_prod_t = self.alphas_cumprod[t]
|
||||
alpha_prod_t_prev = self.alphas_cumprod[t - 1] if t > 0 else self.one
|
||||
beta_prod_t = 1 - alpha_prod_t
|
||||
beta_prod_t_prev = 1 - alpha_prod_t_prev
|
||||
|
||||
# 2. compute predicted original sample from predicted noise also called
|
||||
# "predicted x_0" of formula (15) from https://arxiv.org/pdf/2006.11239.pdf
|
||||
if predict_epsilon:
|
||||
pred_original_sample = (sample - beta_prod_t ** (0.5) * model_output) / alpha_prod_t ** (0.5)
|
||||
else:
|
||||
pred_original_sample = model_output
|
||||
|
||||
# 3. Clip "predicted x_0"
|
||||
if self.config.clip_sample:
|
||||
pred_original_sample = self.clip(pred_original_sample, -1, 1)
|
||||
|
||||
# 4. Compute coefficients for pred_original_sample x_0 and current sample x_t
|
||||
# See formula (7) from https://arxiv.org/pdf/2006.11239.pdf
|
||||
pred_original_sample_coeff = (alpha_prod_t_prev ** (0.5) * self.betas[t]) / beta_prod_t
|
||||
current_sample_coeff = self.alphas[t] ** (0.5) * beta_prod_t_prev / beta_prod_t
|
||||
|
||||
# 5. Compute predicted previous sample µ_t
|
||||
# See formula (7) from https://arxiv.org/pdf/2006.11239.pdf
|
||||
pred_prev_sample = pred_original_sample_coeff * pred_original_sample + current_sample_coeff * sample
|
||||
|
||||
# 6. Add noise
|
||||
variance = 0
|
||||
if t > 0:
|
||||
noise = self.randn_like(model_output, generator=generator)
|
||||
variance = (self._get_variance(t) ** 0.5) * noise
|
||||
|
||||
pred_prev_sample = pred_prev_sample + variance
|
||||
|
||||
return {"prev_sample": pred_prev_sample}
|
||||
|
||||
def add_noise(self, original_samples, noise, timesteps):
|
||||
sqrt_alpha_prod = self.alphas_cumprod[timesteps] ** 0.5
|
||||
sqrt_alpha_prod = self.match_shape(sqrt_alpha_prod, original_samples)
|
||||
sqrt_one_minus_alpha_prod = (1 - self.alphas_cumprod[timesteps]) ** 0.5
|
||||
sqrt_one_minus_alpha_prod = self.match_shape(sqrt_one_minus_alpha_prod, original_samples)
|
||||
|
||||
noisy_samples = sqrt_alpha_prod * original_samples + sqrt_one_minus_alpha_prod * noise
|
||||
return noisy_samples
|
||||
|
||||
def __len__(self):
|
||||
return self.config.num_train_timesteps
|
||||
@@ -1,221 +0,0 @@
|
||||
# Copyright 2022 Zhejiang University Team and The HuggingFace Team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
# DISCLAIMER: This file is strongly influenced by https://github.com/ermongroup/ddim
|
||||
|
||||
import math
|
||||
from typing import Union
|
||||
|
||||
import numpy as np
|
||||
import torch
|
||||
|
||||
from ..configuration_utils import ConfigMixin, register_to_config
|
||||
from .scheduling_utils import SchedulerMixin
|
||||
|
||||
|
||||
def betas_for_alpha_bar(num_diffusion_timesteps, max_beta=0.999):
|
||||
"""
|
||||
Create a beta schedule that discretizes the given alpha_t_bar function, which defines the cumulative product of
|
||||
(1-beta) over time from t = [0,1].
|
||||
|
||||
:param num_diffusion_timesteps: the number of betas to produce. :param alpha_bar: a lambda that takes an argument t
|
||||
from 0 to 1 and
|
||||
produces the cumulative product of (1-beta) up to that part of the diffusion process.
|
||||
:param max_beta: the maximum beta to use; use values lower than 1 to
|
||||
prevent singularities.
|
||||
"""
|
||||
|
||||
def alpha_bar(time_step):
|
||||
return math.cos((time_step + 0.008) / 1.008 * math.pi / 2) ** 2
|
||||
|
||||
betas = []
|
||||
for i in range(num_diffusion_timesteps):
|
||||
t1 = i / num_diffusion_timesteps
|
||||
t2 = (i + 1) / num_diffusion_timesteps
|
||||
betas.append(min(1 - alpha_bar(t2) / alpha_bar(t1), max_beta))
|
||||
return np.array(betas, dtype=np.float32)
|
||||
|
||||
|
||||
class PNDMScheduler(SchedulerMixin, ConfigMixin):
|
||||
@register_to_config
|
||||
def __init__(
|
||||
self,
|
||||
num_train_timesteps=1000,
|
||||
beta_start=0.0001,
|
||||
beta_end=0.02,
|
||||
beta_schedule="linear",
|
||||
tensor_format="pt",
|
||||
):
|
||||
|
||||
if beta_schedule == "linear":
|
||||
self.betas = np.linspace(beta_start, beta_end, num_train_timesteps, dtype=np.float32)
|
||||
elif beta_schedule == "squaredcos_cap_v2":
|
||||
# Glide cosine schedule
|
||||
self.betas = betas_for_alpha_bar(num_train_timesteps)
|
||||
else:
|
||||
raise NotImplementedError(f"{beta_schedule} does is not implemented for {self.__class__}")
|
||||
|
||||
self.alphas = 1.0 - self.betas
|
||||
self.alphas_cumprod = np.cumprod(self.alphas, axis=0)
|
||||
|
||||
self.one = np.array(1.0)
|
||||
|
||||
# For now we only support F-PNDM, i.e. the runge-kutta method
|
||||
# For more information on the algorithm please take a look at the paper: https://arxiv.org/pdf/2202.09778.pdf
|
||||
# mainly at formula (9), (12), (13) and the Algorithm 2.
|
||||
self.pndm_order = 4
|
||||
|
||||
# running values
|
||||
self.cur_model_output = 0
|
||||
self.counter = 0
|
||||
self.cur_sample = None
|
||||
self.ets = []
|
||||
|
||||
# setable values
|
||||
self.num_inference_steps = None
|
||||
self._timesteps = np.arange(0, num_train_timesteps)[::-1].copy()
|
||||
self.prk_timesteps = None
|
||||
self.plms_timesteps = None
|
||||
self.timesteps = None
|
||||
|
||||
self.tensor_format = tensor_format
|
||||
self.set_format(tensor_format=tensor_format)
|
||||
|
||||
def set_timesteps(self, num_inference_steps):
|
||||
self.num_inference_steps = num_inference_steps
|
||||
self._timesteps = list(
|
||||
range(0, self.config.num_train_timesteps, self.config.num_train_timesteps // num_inference_steps)
|
||||
)
|
||||
|
||||
prk_timesteps = np.array(self._timesteps[-self.pndm_order :]).repeat(2) + np.tile(
|
||||
np.array([0, self.config.num_train_timesteps // num_inference_steps // 2]), self.pndm_order
|
||||
)
|
||||
self.prk_timesteps = list(reversed(prk_timesteps[:-1].repeat(2)[1:-1]))
|
||||
self.plms_timesteps = list(reversed(self._timesteps[:-3]))
|
||||
self.timesteps = self.prk_timesteps + self.plms_timesteps
|
||||
|
||||
self.counter = 0
|
||||
self.set_format(tensor_format=self.tensor_format)
|
||||
|
||||
def step(
|
||||
self,
|
||||
model_output: Union[torch.FloatTensor, np.ndarray],
|
||||
timestep: int,
|
||||
sample: Union[torch.FloatTensor, np.ndarray],
|
||||
):
|
||||
if self.counter < len(self.prk_timesteps):
|
||||
return self.step_prk(model_output=model_output, timestep=timestep, sample=sample)
|
||||
else:
|
||||
return self.step_plms(model_output=model_output, timestep=timestep, sample=sample)
|
||||
|
||||
def step_prk(
|
||||
self,
|
||||
model_output: Union[torch.FloatTensor, np.ndarray],
|
||||
timestep: int,
|
||||
sample: Union[torch.FloatTensor, np.ndarray],
|
||||
):
|
||||
"""
|
||||
Step function propagating the sample with the Runge-Kutta method. RK takes 4 forward passes to approximate the
|
||||
solution to the differential equation.
|
||||
"""
|
||||
diff_to_prev = 0 if self.counter % 2 else self.config.num_train_timesteps // self.num_inference_steps // 2
|
||||
prev_timestep = max(timestep - diff_to_prev, self.prk_timesteps[-1])
|
||||
timestep = self.prk_timesteps[self.counter // 4 * 4]
|
||||
|
||||
if self.counter % 4 == 0:
|
||||
self.cur_model_output += 1 / 6 * model_output
|
||||
self.ets.append(model_output)
|
||||
self.cur_sample = sample
|
||||
elif (self.counter - 1) % 4 == 0:
|
||||
self.cur_model_output += 1 / 3 * model_output
|
||||
elif (self.counter - 2) % 4 == 0:
|
||||
self.cur_model_output += 1 / 3 * model_output
|
||||
elif (self.counter - 3) % 4 == 0:
|
||||
model_output = self.cur_model_output + 1 / 6 * model_output
|
||||
self.cur_model_output = 0
|
||||
|
||||
# cur_sample should not be `None`
|
||||
cur_sample = self.cur_sample if self.cur_sample is not None else sample
|
||||
|
||||
prev_sample = self._get_prev_sample(cur_sample, timestep, prev_timestep, model_output)
|
||||
self.counter += 1
|
||||
|
||||
return {"prev_sample": prev_sample}
|
||||
|
||||
def step_plms(
|
||||
self,
|
||||
model_output: Union[torch.FloatTensor, np.ndarray],
|
||||
timestep: int,
|
||||
sample: Union[torch.FloatTensor, np.ndarray],
|
||||
):
|
||||
"""
|
||||
Step function propagating the sample with the linear multi-step method. This has one forward pass with multiple
|
||||
times to approximate the solution.
|
||||
"""
|
||||
if len(self.ets) < 3:
|
||||
raise ValueError(
|
||||
f"{self.__class__} can only be run AFTER scheduler has been run "
|
||||
"in 'prk' mode for at least 12 iterations "
|
||||
"See: https://github.com/huggingface/diffusers/blob/main/src/diffusers/pipelines/pipeline_pndm.py "
|
||||
"for more information."
|
||||
)
|
||||
|
||||
prev_timestep = max(timestep - self.config.num_train_timesteps // self.num_inference_steps, 0)
|
||||
self.ets.append(model_output)
|
||||
|
||||
model_output = (1 / 24) * (55 * self.ets[-1] - 59 * self.ets[-2] + 37 * self.ets[-3] - 9 * self.ets[-4])
|
||||
|
||||
prev_sample = self._get_prev_sample(sample, timestep, prev_timestep, model_output)
|
||||
self.counter += 1
|
||||
|
||||
return {"prev_sample": prev_sample}
|
||||
|
||||
def _get_prev_sample(self, sample, timestep, timestep_prev, model_output):
|
||||
# See formula (9) of PNDM paper https://arxiv.org/pdf/2202.09778.pdf
|
||||
# this function computes x_(t−δ) using the formula of (9)
|
||||
# Note that x_t needs to be added to both sides of the equation
|
||||
|
||||
# Notation (<variable name> -> <name in paper>
|
||||
# alpha_prod_t -> α_t
|
||||
# alpha_prod_t_prev -> α_(t−δ)
|
||||
# beta_prod_t -> (1 - α_t)
|
||||
# beta_prod_t_prev -> (1 - α_(t−δ))
|
||||
# sample -> x_t
|
||||
# model_output -> e_θ(x_t, t)
|
||||
# prev_sample -> x_(t−δ)
|
||||
alpha_prod_t = self.alphas_cumprod[timestep + 1]
|
||||
alpha_prod_t_prev = self.alphas_cumprod[timestep_prev + 1]
|
||||
beta_prod_t = 1 - alpha_prod_t
|
||||
beta_prod_t_prev = 1 - alpha_prod_t_prev
|
||||
|
||||
# corresponds to (α_(t−δ) - α_t) divided by
|
||||
# denominator of x_t in formula (9) and plus 1
|
||||
# Note: (α_(t−δ) - α_t) / (sqrt(α_t) * (sqrt(α_(t−δ)) + sqr(α_t))) =
|
||||
# sqrt(α_(t−δ)) / sqrt(α_t))
|
||||
sample_coeff = (alpha_prod_t_prev / alpha_prod_t) ** (0.5)
|
||||
|
||||
# corresponds to denominator of e_θ(x_t, t) in formula (9)
|
||||
model_output_denom_coeff = alpha_prod_t * beta_prod_t_prev ** (0.5) + (
|
||||
alpha_prod_t * beta_prod_t * alpha_prod_t_prev
|
||||
) ** (0.5)
|
||||
|
||||
# full formula (9)
|
||||
prev_sample = (
|
||||
sample_coeff * sample - (alpha_prod_t_prev - alpha_prod_t) * model_output / model_output_denom_coeff
|
||||
)
|
||||
|
||||
return prev_sample
|
||||
|
||||
def __len__(self):
|
||||
return self.config.num_train_timesteps
|
||||
@@ -1,176 +0,0 @@
|
||||
# Copyright 2022 Google Brain and The HuggingFace Team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
# DISCLAIMER: This file is strongly influenced by https://github.com/yang-song/score_sde_pytorch
|
||||
|
||||
# TODO(Patrick, Anton, Suraj) - make scheduler framework indepedent and clean-up a bit
|
||||
from typing import Union
|
||||
|
||||
import numpy as np
|
||||
import torch
|
||||
|
||||
from ..configuration_utils import ConfigMixin, register_to_config
|
||||
from .scheduling_utils import SchedulerMixin
|
||||
|
||||
|
||||
class ScoreSdeVeScheduler(SchedulerMixin, ConfigMixin):
|
||||
"""
|
||||
The variance exploding stochastic differential equation (SDE) scheduler.
|
||||
|
||||
:param snr: coefficient weighting the step from the model_output sample (from the network) to the random noise.
|
||||
:param sigma_min: initial noise scale for sigma sequence in sampling procedure. The minimum sigma should mirror the
|
||||
distribution of the data.
|
||||
:param sigma_max: :param sampling_eps: the end value of sampling, where timesteps decrease progessively from 1 to
|
||||
epsilon. :param correct_steps: number of correction steps performed on a produced sample. :param tensor_format:
|
||||
"np" or "pt" for the expected format of samples passed to the Scheduler.
|
||||
"""
|
||||
|
||||
@register_to_config
|
||||
def __init__(
|
||||
self,
|
||||
num_train_timesteps=2000,
|
||||
snr=0.15,
|
||||
sigma_min=0.01,
|
||||
sigma_max=1348,
|
||||
sampling_eps=1e-5,
|
||||
correct_steps=1,
|
||||
tensor_format="pt",
|
||||
):
|
||||
# self.sigmas = None
|
||||
# self.discrete_sigmas = None
|
||||
#
|
||||
# # setable values
|
||||
# self.num_inference_steps = None
|
||||
self.timesteps = None
|
||||
|
||||
self.set_sigmas(num_train_timesteps, sigma_min, sigma_max, sampling_eps)
|
||||
|
||||
self.tensor_format = tensor_format
|
||||
self.set_format(tensor_format=tensor_format)
|
||||
|
||||
def set_timesteps(self, num_inference_steps, sampling_eps=None):
|
||||
sampling_eps = sampling_eps if sampling_eps is not None else self.config.sampling_eps
|
||||
tensor_format = getattr(self, "tensor_format", "pt")
|
||||
if tensor_format == "np":
|
||||
self.timesteps = np.linspace(1, sampling_eps, num_inference_steps)
|
||||
elif tensor_format == "pt":
|
||||
self.timesteps = torch.linspace(1, sampling_eps, num_inference_steps)
|
||||
else:
|
||||
raise ValueError(f"`self.tensor_format`: {self.tensor_format} is not valid.")
|
||||
|
||||
def set_sigmas(self, num_inference_steps, sigma_min=None, sigma_max=None, sampling_eps=None):
|
||||
sigma_min = sigma_min if sigma_min is not None else self.config.sigma_min
|
||||
sigma_max = sigma_max if sigma_max is not None else self.config.sigma_max
|
||||
sampling_eps = sampling_eps if sampling_eps is not None else self.config.sampling_eps
|
||||
if self.timesteps is None:
|
||||
self.set_timesteps(num_inference_steps, sampling_eps)
|
||||
|
||||
tensor_format = getattr(self, "tensor_format", "pt")
|
||||
if tensor_format == "np":
|
||||
self.discrete_sigmas = np.exp(np.linspace(np.log(sigma_min), np.log(sigma_max), num_inference_steps))
|
||||
self.sigmas = np.array([sigma_min * (sigma_max / sigma_min) ** t for t in self.timesteps])
|
||||
elif tensor_format == "pt":
|
||||
self.discrete_sigmas = torch.exp(torch.linspace(np.log(sigma_min), np.log(sigma_max), num_inference_steps))
|
||||
self.sigmas = torch.tensor([sigma_min * (sigma_max / sigma_min) ** t for t in self.timesteps])
|
||||
else:
|
||||
raise ValueError(f"`self.tensor_format`: {self.tensor_format} is not valid.")
|
||||
|
||||
def get_adjacent_sigma(self, timesteps, t):
|
||||
tensor_format = getattr(self, "tensor_format", "pt")
|
||||
if tensor_format == "np":
|
||||
return np.where(timesteps == 0, np.zeros_like(t), self.discrete_sigmas[timesteps - 1])
|
||||
elif tensor_format == "pt":
|
||||
return torch.where(
|
||||
timesteps == 0, torch.zeros_like(t), self.discrete_sigmas[timesteps - 1].to(timesteps.device)
|
||||
)
|
||||
|
||||
raise ValueError(f"`self.tensor_format`: {self.tensor_format} is not valid.")
|
||||
|
||||
def set_seed(self, seed):
|
||||
tensor_format = getattr(self, "tensor_format", "pt")
|
||||
if tensor_format == "np":
|
||||
np.random.seed(seed)
|
||||
elif tensor_format == "pt":
|
||||
torch.manual_seed(seed)
|
||||
else:
|
||||
raise ValueError(f"`self.tensor_format`: {self.tensor_format} is not valid.")
|
||||
|
||||
def step_pred(
|
||||
self,
|
||||
model_output: Union[torch.FloatTensor, np.ndarray],
|
||||
timestep: int,
|
||||
sample: Union[torch.FloatTensor, np.ndarray],
|
||||
seed=None,
|
||||
):
|
||||
"""
|
||||
Predict the sample at the previous timestep by reversing the SDE.
|
||||
"""
|
||||
if seed is not None:
|
||||
self.set_seed(seed)
|
||||
# TODO(Patrick) non-PyTorch
|
||||
|
||||
timestep = timestep * torch.ones(
|
||||
sample.shape[0], device=sample.device
|
||||
) # torch.repeat_interleave(timestep, sample.shape[0])
|
||||
timesteps = (timestep * (len(self.timesteps) - 1)).long()
|
||||
|
||||
sigma = self.discrete_sigmas[timesteps].to(sample.device)
|
||||
adjacent_sigma = self.get_adjacent_sigma(timesteps, timestep)
|
||||
drift = self.zeros_like(sample)
|
||||
diffusion = (sigma**2 - adjacent_sigma**2) ** 0.5
|
||||
|
||||
# equation 6 in the paper: the model_output modeled by the network is grad_x log pt(x)
|
||||
# also equation 47 shows the analog from SDE models to ancestral sampling methods
|
||||
drift = drift - diffusion[:, None, None, None] ** 2 * model_output
|
||||
|
||||
# equation 6: sample noise for the diffusion term of
|
||||
noise = self.randn_like(sample)
|
||||
prev_sample_mean = sample - drift # subtract because `dt` is a small negative timestep
|
||||
# TODO is the variable diffusion the correct scaling term for the noise?
|
||||
prev_sample = prev_sample_mean + diffusion[:, None, None, None] * noise # add impact of diffusion field g
|
||||
|
||||
return {"prev_sample": prev_sample, "prev_sample_mean": prev_sample_mean}
|
||||
|
||||
def step_correct(
|
||||
self,
|
||||
model_output: Union[torch.FloatTensor, np.ndarray],
|
||||
sample: Union[torch.FloatTensor, np.ndarray],
|
||||
seed=None,
|
||||
):
|
||||
"""
|
||||
Correct the predicted sample based on the output model_output of the network. This is often run repeatedly
|
||||
after making the prediction for the previous timestep.
|
||||
"""
|
||||
if seed is not None:
|
||||
self.set_seed(seed)
|
||||
|
||||
# For small batch sizes, the paper "suggest replacing norm(z) with sqrt(d), where d is the dim. of z"
|
||||
# sample noise for correction
|
||||
noise = self.randn_like(sample)
|
||||
|
||||
# compute step size from the model_output, the noise, and the snr
|
||||
grad_norm = self.norm(model_output)
|
||||
noise_norm = self.norm(noise)
|
||||
step_size = (self.config.snr * noise_norm / grad_norm) ** 2 * 2
|
||||
step_size = step_size * torch.ones(sample.shape[0]).to(sample.device)
|
||||
# self.repeat_scalar(step_size, sample.shape[0])
|
||||
|
||||
# compute corrected sample: model_output term and noise term
|
||||
prev_sample_mean = sample + step_size[:, None, None, None] * model_output
|
||||
prev_sample = prev_sample_mean + ((step_size * 2) ** 0.5)[:, None, None, None] * noise
|
||||
|
||||
return {"prev_sample": prev_sample}
|
||||
|
||||
def __len__(self):
|
||||
return self.config.num_train_timesteps
|
||||
@@ -1,62 +0,0 @@
|
||||
# Copyright 2022 Google Brain and The HuggingFace Team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
# DISCLAIMER: This file is strongly influenced by https://github.com/yang-song/score_sde_pytorch
|
||||
|
||||
# TODO(Patrick, Anton, Suraj) - make scheduler framework indepedent and clean-up a bit
|
||||
|
||||
import numpy as np
|
||||
import torch
|
||||
|
||||
from ..configuration_utils import ConfigMixin, register_to_config
|
||||
from .scheduling_utils import SchedulerMixin
|
||||
|
||||
|
||||
class ScoreSdeVpScheduler(SchedulerMixin, ConfigMixin):
|
||||
@register_to_config
|
||||
def __init__(self, num_train_timesteps=2000, beta_min=0.1, beta_max=20, sampling_eps=1e-3, tensor_format="np"):
|
||||
|
||||
self.sigmas = None
|
||||
self.discrete_sigmas = None
|
||||
self.timesteps = None
|
||||
|
||||
def set_timesteps(self, num_inference_steps):
|
||||
self.timesteps = torch.linspace(1, self.config.sampling_eps, num_inference_steps)
|
||||
|
||||
def step_pred(self, score, x, t):
|
||||
# TODO(Patrick) better comments + non-PyTorch
|
||||
# postprocess model score
|
||||
log_mean_coeff = (
|
||||
-0.25 * t**2 * (self.config.beta_max - self.config.beta_min) - 0.5 * t * self.config.beta_min
|
||||
)
|
||||
std = torch.sqrt(1.0 - torch.exp(2.0 * log_mean_coeff))
|
||||
score = -score / std[:, None, None, None]
|
||||
|
||||
# compute
|
||||
dt = -1.0 / len(self.timesteps)
|
||||
|
||||
beta_t = self.config.beta_min + t * (self.config.beta_max - self.config.beta_min)
|
||||
drift = -0.5 * beta_t[:, None, None, None] * x
|
||||
diffusion = torch.sqrt(beta_t)
|
||||
drift = drift - diffusion[:, None, None, None] ** 2 * score
|
||||
x_mean = x + drift * dt
|
||||
|
||||
# add noise
|
||||
noise = torch.randn_like(x)
|
||||
x = x_mean + diffusion[:, None, None, None] * np.sqrt(-dt) * noise
|
||||
|
||||
return x, x_mean
|
||||
|
||||
def __len__(self):
|
||||
return self.config.num_train_timesteps
|
||||
@@ -1,105 +0,0 @@
|
||||
# Copyright 2022 The HuggingFace Team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
from typing import Union
|
||||
|
||||
import numpy as np
|
||||
import torch
|
||||
|
||||
|
||||
SCHEDULER_CONFIG_NAME = "scheduler_config.json"
|
||||
|
||||
|
||||
class SchedulerMixin:
|
||||
|
||||
config_name = SCHEDULER_CONFIG_NAME
|
||||
ignore_for_config = ["tensor_format"]
|
||||
|
||||
def set_format(self, tensor_format="pt"):
|
||||
self.tensor_format = tensor_format
|
||||
if tensor_format == "pt":
|
||||
for key, value in vars(self).items():
|
||||
if isinstance(value, np.ndarray):
|
||||
setattr(self, key, torch.from_numpy(value))
|
||||
|
||||
return self
|
||||
|
||||
def clip(self, tensor, min_value=None, max_value=None):
|
||||
tensor_format = getattr(self, "tensor_format", "pt")
|
||||
|
||||
if tensor_format == "np":
|
||||
return np.clip(tensor, min_value, max_value)
|
||||
elif tensor_format == "pt":
|
||||
return torch.clamp(tensor, min_value, max_value)
|
||||
|
||||
raise ValueError(f"`self.tensor_format`: {self.tensor_format} is not valid.")
|
||||
|
||||
def log(self, tensor):
|
||||
tensor_format = getattr(self, "tensor_format", "pt")
|
||||
|
||||
if tensor_format == "np":
|
||||
return np.log(tensor)
|
||||
elif tensor_format == "pt":
|
||||
return torch.log(tensor)
|
||||
|
||||
raise ValueError(f"`self.tensor_format`: {self.tensor_format} is not valid.")
|
||||
|
||||
def match_shape(self, values: Union[np.ndarray, torch.Tensor], broadcast_array: Union[np.ndarray, torch.Tensor]):
|
||||
"""
|
||||
Turns a 1-D array into an array or tensor with len(broadcast_array.shape) dims.
|
||||
|
||||
Args:
|
||||
values: an array or tensor of values to extract.
|
||||
broadcast_array: an array with a larger shape of K dimensions with the batch
|
||||
dimension equal to the length of timesteps.
|
||||
Returns:
|
||||
a tensor of shape [batch_size, 1, ...] where the shape has K dims.
|
||||
"""
|
||||
|
||||
tensor_format = getattr(self, "tensor_format", "pt")
|
||||
values = values.flatten()
|
||||
|
||||
while len(values.shape) < len(broadcast_array.shape):
|
||||
values = values[..., None]
|
||||
if tensor_format == "pt":
|
||||
values = values.to(broadcast_array.device)
|
||||
|
||||
return values
|
||||
|
||||
def norm(self, tensor):
|
||||
tensor_format = getattr(self, "tensor_format", "pt")
|
||||
if tensor_format == "np":
|
||||
return np.linalg.norm(tensor)
|
||||
elif tensor_format == "pt":
|
||||
return torch.norm(tensor.reshape(tensor.shape[0], -1), dim=-1).mean()
|
||||
|
||||
raise ValueError(f"`self.tensor_format`: {self.tensor_format} is not valid.")
|
||||
|
||||
def randn_like(self, tensor, generator=None):
|
||||
tensor_format = getattr(self, "tensor_format", "pt")
|
||||
if tensor_format == "np":
|
||||
return np.random.randn(*np.shape(tensor))
|
||||
elif tensor_format == "pt":
|
||||
# return torch.randn_like(tensor)
|
||||
return torch.randn(tensor.shape, layout=tensor.layout, generator=generator).to(tensor.device)
|
||||
|
||||
raise ValueError(f"`self.tensor_format`: {self.tensor_format} is not valid.")
|
||||
|
||||
def zeros_like(self, tensor):
|
||||
tensor_format = getattr(self, "tensor_format", "pt")
|
||||
if tensor_format == "np":
|
||||
return np.zeros_like(tensor)
|
||||
elif tensor_format == "pt":
|
||||
return torch.zeros_like(tensor)
|
||||
|
||||
raise ValueError(f"`self.tensor_format`: {self.tensor_format} is not valid.")
|
||||
@@ -1,55 +0,0 @@
|
||||
import os
|
||||
import random
|
||||
import unittest
|
||||
from distutils.util import strtobool
|
||||
|
||||
import torch
|
||||
|
||||
|
||||
global_rng = random.Random()
|
||||
torch_device = "cuda" if torch.cuda.is_available() else "cpu"
|
||||
|
||||
|
||||
def parse_flag_from_env(key, default=False):
|
||||
try:
|
||||
value = os.environ[key]
|
||||
except KeyError:
|
||||
# KEY isn't set, default to `default`.
|
||||
_value = default
|
||||
else:
|
||||
# KEY is set, convert it to True or False.
|
||||
try:
|
||||
_value = strtobool(value)
|
||||
except ValueError:
|
||||
# More values are supported, but let's keep the message simple.
|
||||
raise ValueError(f"If set, {key} must be yes or no.")
|
||||
return _value
|
||||
|
||||
|
||||
_run_slow_tests = parse_flag_from_env("RUN_SLOW", default=False)
|
||||
|
||||
|
||||
def floats_tensor(shape, scale=1.0, rng=None, name=None):
|
||||
"""Creates a random float32 tensor"""
|
||||
if rng is None:
|
||||
rng = global_rng
|
||||
|
||||
total_dims = 1
|
||||
for dim in shape:
|
||||
total_dims *= dim
|
||||
|
||||
values = []
|
||||
for _ in range(total_dims):
|
||||
values.append(rng.random() * scale)
|
||||
|
||||
return torch.tensor(data=values, dtype=torch.float).view(shape).contiguous()
|
||||
|
||||
|
||||
def slow(test_case):
|
||||
"""
|
||||
Decorator marking a test as slow.
|
||||
|
||||
Slow tests are skipped by default. Set the RUN_SLOW environment variable to a truthy value to run them.
|
||||
|
||||
"""
|
||||
return unittest.skipUnless(_run_slow_tests, "test is slow")(test_case)
|
||||
@@ -1,89 +0,0 @@
|
||||
import copy
|
||||
|
||||
import torch
|
||||
|
||||
|
||||
class EMAModel:
|
||||
"""
|
||||
Exponential Moving Average of models weights
|
||||
"""
|
||||
|
||||
def __init__(
|
||||
self,
|
||||
model,
|
||||
update_after_step=0,
|
||||
inv_gamma=1.0,
|
||||
power=2 / 3,
|
||||
min_value=0.0,
|
||||
max_value=0.9999,
|
||||
device=None,
|
||||
):
|
||||
"""
|
||||
@crowsonkb's notes on EMA Warmup:
|
||||
If gamma=1 and power=1, implements a simple average. gamma=1, power=2/3 are good values for models you plan
|
||||
to train for a million or more steps (reaches decay factor 0.999 at 31.6K steps, 0.9999 at 1M steps),
|
||||
gamma=1, power=3/4 for models you plan to train for less (reaches decay factor 0.999 at 10K steps, 0.9999
|
||||
at 215.4k steps).
|
||||
Args:
|
||||
inv_gamma (float): Inverse multiplicative factor of EMA warmup. Default: 1.
|
||||
power (float): Exponential factor of EMA warmup. Default: 2/3.
|
||||
min_value (float): The minimum EMA decay rate. Default: 0.
|
||||
"""
|
||||
|
||||
self.averaged_model = copy.deepcopy(model).eval()
|
||||
self.averaged_model.requires_grad_(False)
|
||||
|
||||
self.update_after_step = update_after_step
|
||||
self.inv_gamma = inv_gamma
|
||||
self.power = power
|
||||
self.min_value = min_value
|
||||
self.max_value = max_value
|
||||
|
||||
if device is not None:
|
||||
self.averaged_model = self.averaged_model.to(device=device)
|
||||
|
||||
self.decay = 0.0
|
||||
self.optimization_step = 0
|
||||
|
||||
def get_decay(self, optimization_step):
|
||||
"""
|
||||
Compute the decay factor for the exponential moving average.
|
||||
"""
|
||||
step = max(0, optimization_step - self.update_after_step - 1)
|
||||
value = 1 - (1 + step / self.inv_gamma) ** -self.power
|
||||
|
||||
if step <= 0:
|
||||
return 0.0
|
||||
|
||||
return max(self.min_value, min(value, self.max_value))
|
||||
|
||||
@torch.no_grad()
|
||||
def step(self, new_model):
|
||||
ema_state_dict = {}
|
||||
ema_params = self.averaged_model.state_dict()
|
||||
|
||||
self.decay = self.get_decay(self.optimization_step)
|
||||
|
||||
for key, param in new_model.named_parameters():
|
||||
if isinstance(param, dict):
|
||||
continue
|
||||
try:
|
||||
ema_param = ema_params[key]
|
||||
except KeyError:
|
||||
ema_param = param.float().clone() if param.ndim == 1 else copy.deepcopy(param)
|
||||
ema_params[key] = ema_param
|
||||
|
||||
if not param.requires_grad:
|
||||
ema_params[key].copy_(param.to(dtype=ema_param.dtype).data)
|
||||
ema_param = ema_params[key]
|
||||
else:
|
||||
ema_param.mul_(self.decay)
|
||||
ema_param.add_(param.data.to(dtype=ema_param.dtype), alpha=1 - self.decay)
|
||||
|
||||
ema_state_dict[key] = ema_param
|
||||
|
||||
for key, param in new_model.named_buffers():
|
||||
ema_state_dict[key] = param
|
||||
|
||||
self.averaged_model.load_state_dict(ema_state_dict, strict=False)
|
||||
self.optimization_step += 1
|
||||
@@ -1,150 +0,0 @@
|
||||
# Copyright 2021 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
import importlib
|
||||
import os
|
||||
from collections import OrderedDict
|
||||
|
||||
import importlib_metadata
|
||||
from requests.exceptions import HTTPError
|
||||
|
||||
from .logging import get_logger
|
||||
|
||||
|
||||
logger = get_logger(__name__)
|
||||
|
||||
|
||||
hf_cache_home = os.path.expanduser(
|
||||
os.getenv("HF_HOME", os.path.join(os.getenv("XDG_CACHE_HOME", "~/.cache"), "huggingface"))
|
||||
)
|
||||
default_cache_path = os.path.join(hf_cache_home, "diffusers")
|
||||
|
||||
|
||||
CONFIG_NAME = "config.json"
|
||||
HUGGINGFACE_CO_RESOLVE_ENDPOINT = "https://huggingface.co"
|
||||
DIFFUSERS_CACHE = default_cache_path
|
||||
DIFFUSERS_DYNAMIC_MODULE_NAME = "diffusers_modules"
|
||||
HF_MODULES_CACHE = os.getenv("HF_MODULES_CACHE", os.path.join(hf_cache_home, "modules"))
|
||||
|
||||
|
||||
_transformers_available = importlib.util.find_spec("transformers") is not None
|
||||
try:
|
||||
_transformers_version = importlib_metadata.version("transformers")
|
||||
logger.debug(f"Successfully imported transformers version {_transformers_version}")
|
||||
except importlib_metadata.PackageNotFoundError:
|
||||
_transformers_available = False
|
||||
|
||||
|
||||
_inflect_available = importlib.util.find_spec("inflect") is not None
|
||||
try:
|
||||
_inflect_version = importlib_metadata.version("inflect")
|
||||
logger.debug(f"Successfully imported inflect version {_inflect_version}")
|
||||
except importlib_metadata.PackageNotFoundError:
|
||||
_inflect_available = False
|
||||
|
||||
|
||||
_unidecode_available = importlib.util.find_spec("unidecode") is not None
|
||||
try:
|
||||
_unidecode_version = importlib_metadata.version("unidecode")
|
||||
logger.debug(f"Successfully imported unidecode version {_unidecode_version}")
|
||||
except importlib_metadata.PackageNotFoundError:
|
||||
_unidecode_available = False
|
||||
|
||||
|
||||
_modelcards_available = importlib.util.find_spec("modelcards") is not None
|
||||
try:
|
||||
_modelcards_version = importlib_metadata.version("modelcards")
|
||||
logger.debug(f"Successfully imported modelcards version {_modelcards_version}")
|
||||
except importlib_metadata.PackageNotFoundError:
|
||||
_modelcards_available = False
|
||||
|
||||
|
||||
def is_transformers_available():
|
||||
return _transformers_available
|
||||
|
||||
|
||||
def is_inflect_available():
|
||||
return _inflect_available
|
||||
|
||||
|
||||
def is_unidecode_available():
|
||||
return _unidecode_available
|
||||
|
||||
|
||||
def is_modelcards_available():
|
||||
return _modelcards_available
|
||||
|
||||
|
||||
class RepositoryNotFoundError(HTTPError):
|
||||
"""
|
||||
Raised when trying to access a hf.co URL with an invalid repository name, or with a private repo name the user does
|
||||
not have access to.
|
||||
"""
|
||||
|
||||
|
||||
class EntryNotFoundError(HTTPError):
|
||||
"""Raised when trying to access a hf.co URL with a valid repository and revision but an invalid filename."""
|
||||
|
||||
|
||||
class RevisionNotFoundError(HTTPError):
|
||||
"""Raised when trying to access a hf.co URL with a valid repository but an invalid revision."""
|
||||
|
||||
|
||||
TRANSFORMERS_IMPORT_ERROR = """
|
||||
{0} requires the transformers library but it was not found in your environment. You can install it with pip: `pip
|
||||
install transformers`
|
||||
"""
|
||||
|
||||
|
||||
UNIDECODE_IMPORT_ERROR = """
|
||||
{0} requires the unidecode library but it was not found in your environment. You can install it with pip: `pip install
|
||||
Unidecode`
|
||||
"""
|
||||
|
||||
|
||||
INFLECT_IMPORT_ERROR = """
|
||||
{0} requires the inflect library but it was not found in your environment. You can install it with pip: `pip install
|
||||
inflect`
|
||||
"""
|
||||
|
||||
|
||||
BACKENDS_MAPPING = OrderedDict(
|
||||
[
|
||||
("transformers", (is_transformers_available, TRANSFORMERS_IMPORT_ERROR)),
|
||||
("unidecode", (is_unidecode_available, UNIDECODE_IMPORT_ERROR)),
|
||||
("inflect", (is_inflect_available, INFLECT_IMPORT_ERROR)),
|
||||
]
|
||||
)
|
||||
|
||||
|
||||
def requires_backends(obj, backends):
|
||||
if not isinstance(backends, (list, tuple)):
|
||||
backends = [backends]
|
||||
|
||||
name = obj.__name__ if hasattr(obj, "__name__") else obj.__class__.__name__
|
||||
checks = (BACKENDS_MAPPING[backend] for backend in backends)
|
||||
failed = [msg.format(name) for available, msg in checks if not available()]
|
||||
if failed:
|
||||
raise ImportError("".join(failed))
|
||||
|
||||
|
||||
class DummyObject(type):
|
||||
"""
|
||||
Metaclass for the dummy objects. Any class inheriting from it will return the ImportError generated by
|
||||
`requires_backend` each time a user tries to access any method of that class.
|
||||
"""
|
||||
|
||||
def __getattr__(cls, key):
|
||||
if key.startswith("_"):
|
||||
return super().__getattr__(cls, key)
|
||||
requires_backends(cls, cls._backends)
|
||||
@@ -1,10 +0,0 @@
|
||||
# This file is autogenerated by the command `make fix-copies`, do not edit.
|
||||
# flake8: noqa
|
||||
from ..utils import DummyObject, requires_backends
|
||||
|
||||
|
||||
class GradTTSPipeline(metaclass=DummyObject):
|
||||
_backends = ["transformers", "inflect", "unidecode"]
|
||||
|
||||
def __init__(self, *args, **kwargs):
|
||||
requires_backends(self, ["transformers", "inflect", "unidecode"])
|
||||
@@ -1,10 +0,0 @@
|
||||
# This file is autogenerated by the command `make fix-copies`, do not edit.
|
||||
# flake8: noqa
|
||||
from ..utils import DummyObject, requires_backends
|
||||
|
||||
|
||||
class LDMTextToImagePipeline(metaclass=DummyObject):
|
||||
_backends = ["transformers"]
|
||||
|
||||
def __init__(self, *args, **kwargs):
|
||||
requires_backends(self, ["transformers"])
|
||||
Some files were not shown because too many files have changed in this diff Show More
Reference in New Issue
Block a user